") 無刷電機(jī)FOC矢量控制入門知識(shí)
無刷電機(jī)FOC矢量控制入門知識(shí)
1)FOC矢量控制的作用
我們前兩節(jié)講的無刷電機(jī)(BLDC),是最簡單的一種結(jié)構(gòu),當(dāng)轉(zhuǎn)子勻速轉(zhuǎn)動(dòng)時(shí),定子內(nèi)產(chǎn)生的反電動(dòng)勢是梯形波;在驅(qū)動(dòng)無刷電機(jī)轉(zhuǎn)動(dòng)時(shí),線圈中只有加電和不加電兩種狀態(tài),所以轉(zhuǎn)矩是脈沖式的,轉(zhuǎn)動(dòng)的過程不平穩(wěn),會(huì)有頓挫感。雖然增加電機(jī)的極對數(shù)可以減輕這種不平穩(wěn)特性,但是極對數(shù)不能無限增加。
FOC矢量控制,就是研究怎樣控制無刷電機(jī)的幾個(gè)定子線圈中的電壓,使得它們產(chǎn)生的磁場效果之和,能產(chǎn)生穩(wěn)定的轉(zhuǎn)矩,使轉(zhuǎn)子平穩(wěn)地轉(zhuǎn)動(dòng)。為了達(dá)到這一目的,需要使用一種特殊的無刷電機(jī)——永磁同步電機(jī)。
永磁同步電機(jī)(PMSM)的轉(zhuǎn)子和定子間的磁路是經(jīng)過特殊設(shè)計(jì)的,使得轉(zhuǎn)子轉(zhuǎn)動(dòng)時(shí),定子內(nèi)的反電動(dòng)勢是正弦波;在驅(qū)動(dòng)它時(shí),也使用正弦電壓驅(qū)動(dòng),那么它的轉(zhuǎn)矩大小就有可能保持不變,使得轉(zhuǎn)動(dòng)更加平穩(wěn)。通常我們所說的FOC矢量控制,都是指的用三相正弦電壓去驅(qū)動(dòng)永磁同步電機(jī)。
另外,普通的梯形波反電動(dòng)勢的無刷電機(jī)也可以用FOC矢量控制驅(qū)動(dòng)。因?yàn)樘菪尾梢越茷檎也ǎ允褂糜来艧o刷電機(jī)的正弦波矢量控制法,也是可以驅(qū)動(dòng)普通的梯形波無刷電機(jī)的,只是相比永磁同步電機(jī)轉(zhuǎn)矩的穩(wěn)定性稍差。
2)FOC矢量控制的實(shí)現(xiàn)方法
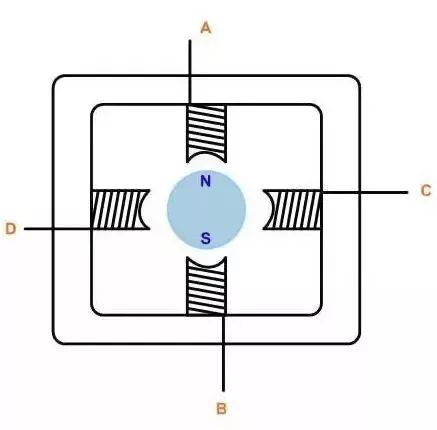
由于FOC矢量控制的目的是要能實(shí)現(xiàn)一個(gè)大小固定,方向旋轉(zhuǎn)的轉(zhuǎn)矩。如下圖所示,也就是定子產(chǎn)生的磁場之和要大小固定,方向穩(wěn)定地旋轉(zhuǎn):
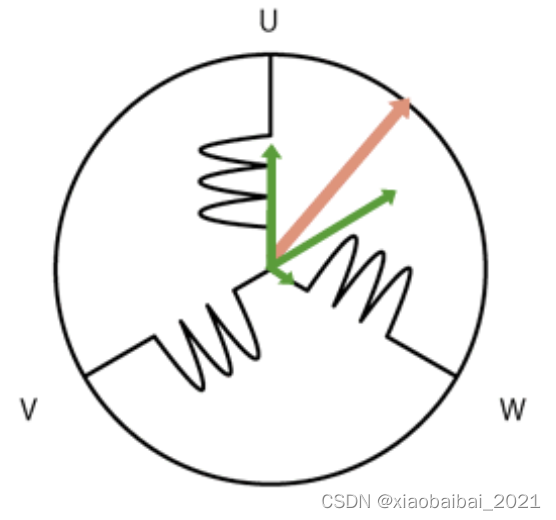
不難想到,當(dāng)三相線圈中通過幅度相同、相位相差120°的正弦波電流時(shí),可以得到一個(gè)旋轉(zhuǎn)的磁場,而且這個(gè)磁場的大小是恒定的。而這個(gè)三相正弦波,需要與轉(zhuǎn)子的位置、轉(zhuǎn)速相匹配,才能把電機(jī)順利驅(qū)動(dòng)起來。具體來說,正弦波的相位與轉(zhuǎn)子位置相關(guān),正弦波的幅值與轉(zhuǎn)速(電壓控制電流,電流控制轉(zhuǎn)矩)相關(guān)。
FOC矢量控制,就是要依據(jù)轉(zhuǎn)子的位置和轉(zhuǎn)速,來確定一個(gè)合適的三相正弦波電壓去驅(qū)動(dòng)定子線圈。但是,直接通過轉(zhuǎn)速和位置去推算三相電的特性比較困難,我們需要使用各種數(shù)學(xué)變換來降低控制的難度。
a)基礎(chǔ)的數(shù)學(xué)變換
我們先來熟悉一下幾個(gè)數(shù)學(xué)變換,之后再講如何使用它們?nèi)?shí)現(xiàn)FOC控制。
Clarke變換
Clarke也叫3s/2s變換,是一個(gè)實(shí)現(xiàn)三相到兩相的變換。
在三相線圈中,通過的電流Ia、Ib、Ic,它們產(chǎn)生的電流矢量在平面上,是可以變換到一個(gè)直角坐標(biāo)系中的,這樣,可以把三相變換為兩相,如下圖:
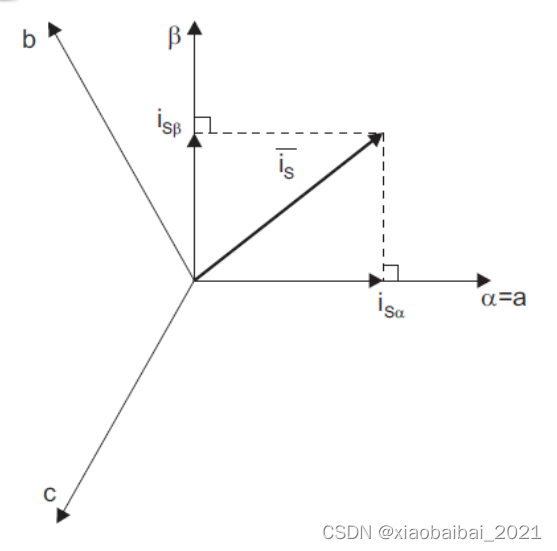
a、b、c坐標(biāo)系里的電流之和,可以通過以下公式變換到α、β直角坐標(biāo)系中:

這樣,我們就把相差120°的三相電流,變換成了正交的兩相電流。
Park變換
Park又叫2s/2r變換,是一個(gè)實(shí)現(xiàn)兩相靜止到兩相旋轉(zhuǎn)的變換。
如下圖,α、β是一個(gè)靜止的直角坐標(biāo)系,d、q是一個(gè)繞原點(diǎn)旋轉(zhuǎn)的直角坐標(biāo)系(與轉(zhuǎn)子相對靜止,d方向的電流矢量能產(chǎn)生轉(zhuǎn)矩,q方向的電流矢量不能產(chǎn)生轉(zhuǎn)矩):
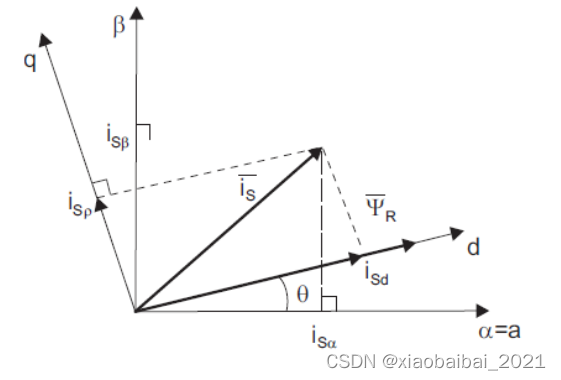
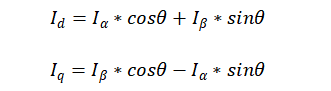
α、β坐標(biāo)系里的電流之和,可以通過以下公式變換到旋轉(zhuǎn)的d、q直角坐標(biāo)系中:
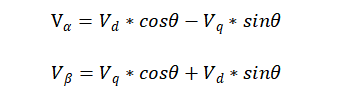
同樣地,不難得出 Park逆變換 ,把旋轉(zhuǎn)的d、q直角坐標(biāo)系中的矢量,變換為靜止的α、β坐標(biāo)系中的矢量可以使用如下公式:
b)FOC矢量控制流程
好了,講了幾個(gè)變換的,那么對于簡化FOC的實(shí)現(xiàn)有什么作用呢?我們把三相的電流Ia、Ib、Ic經(jīng)過Clarke變換,再經(jīng)過Park變換,會(huì)發(fā)現(xiàn),旋轉(zhuǎn)的電流矢量,轉(zhuǎn)換到旋轉(zhuǎn)的d、q坐標(biāo)系以后,變成了兩個(gè)固定的電流Id和Iq。
通過這兩層變換之后,我們再來控制電流矢量的大小就簡單得多了,而控制了電流就等于控制了轉(zhuǎn)矩。
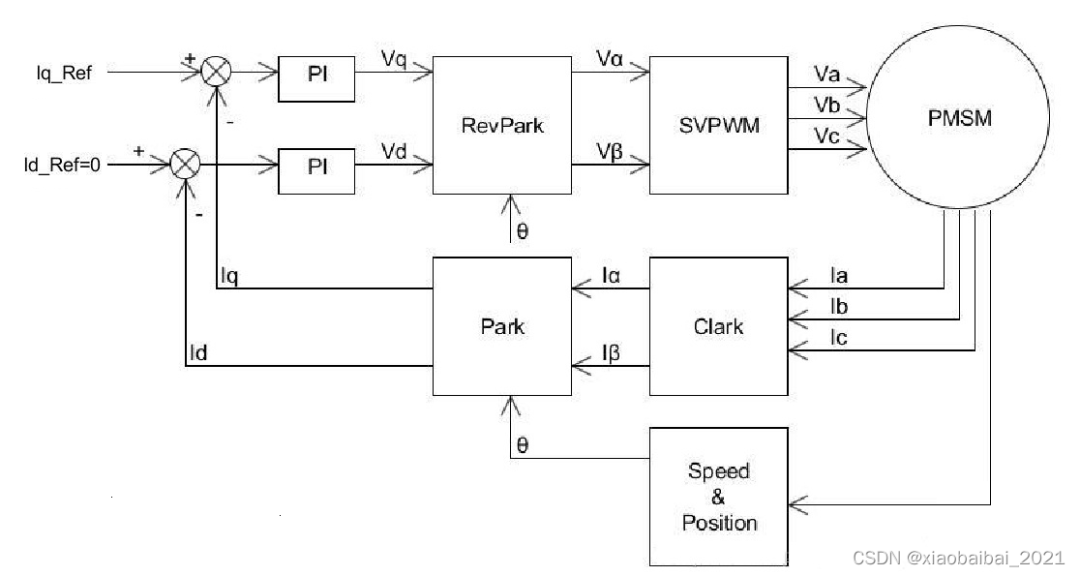
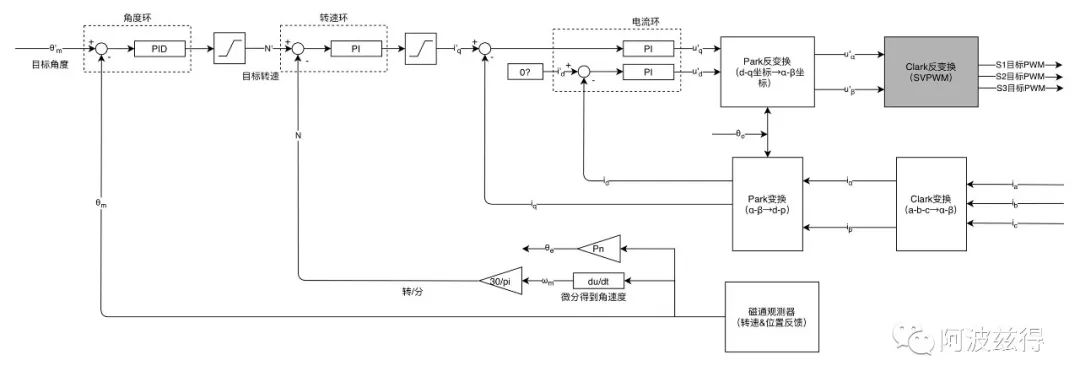
下面這張圖是FOC矢量控制的基本框圖:
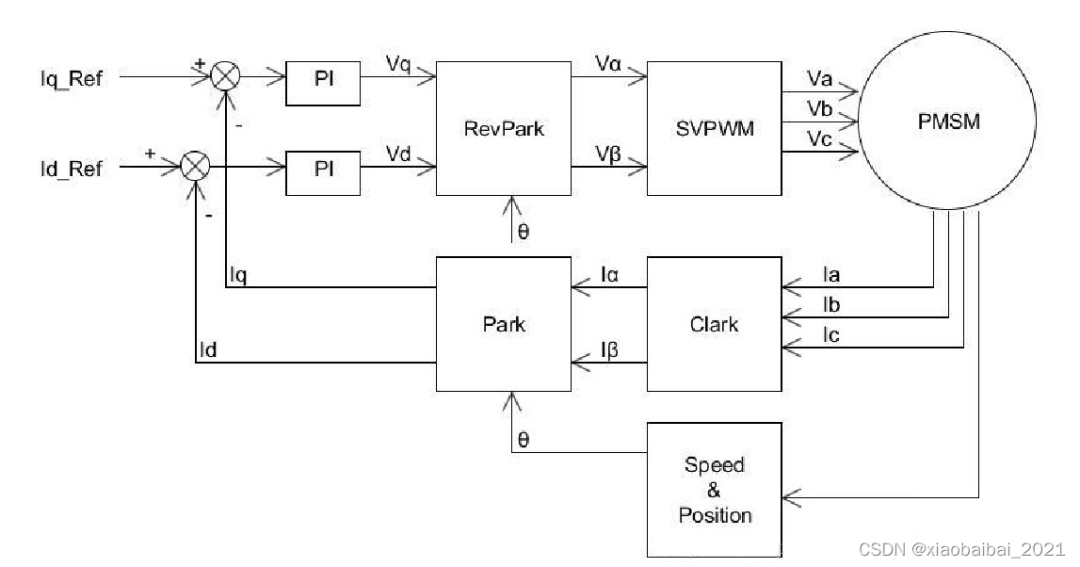
FOC控制的步驟如下:
(1)采集無刷電機(jī)的三相電流Ia、Ib、Ic;
(2)進(jìn)行Clarke變換,計(jì)算出電流Iα、Iβ;
(3)進(jìn)行Park變換,計(jì)算出電流Iq、Id(這一步需要用到轉(zhuǎn)子的角度信息);
(4)依據(jù)特定的控制策略,來調(diào)節(jié)Iq、Id的大小,圖中使用的是PID控制(只用了PI);
(5)PID控制器的輸出,是電壓Vq、Vd(旋轉(zhuǎn)坐標(biāo)系下的電壓),因?yàn)榭刂齐妷阂簿涂刂屏送ㄟ^電機(jī)的電流;
(6)再通過Park反變換,把Vq和Vd變換為靜止的直角坐標(biāo)系下的Vα、Vβ(這一步也需要轉(zhuǎn)子角度信息);
(7)最后用SVPWM方法來實(shí)現(xiàn)Vα、Vβ的輸出,驅(qū)動(dòng)三相全橋;
我們經(jīng)過clarke變換、park變換,把電流三相交流電變換到了一個(gè)虛擬的坐標(biāo)系下,變成了兩個(gè)直流電,是為了方便控制;得到了虛擬的控制量之后,還要反變換回去,得到三相電的控制量。
注意上面步驟中這個(gè)“特定的控制策略”,一種最容易想到的方法是使得Id=0,控制Iq的大小去控制轉(zhuǎn)矩,這樣效率最高,也是最常見的一種FOC控制方法。
除了Id = 0策略,還有多種控制策略,如:單位電流電磁轉(zhuǎn)矩最大控制、弱磁控制、最大輸出功率控制,等等多種控制方法,有興趣可以自行鉆研。
c)SVPWM實(shí)現(xiàn)
FOC的基本框圖中,SVPWM是控制中重要的一步,它把Vα、Vβ兩相正交的電壓矢量變換成了三相全橋的控制量。它是如何工作的呢?
如下圖的三相全橋,每個(gè)橋臂同一時(shí)刻上、下管只能導(dǎo)通一個(gè):
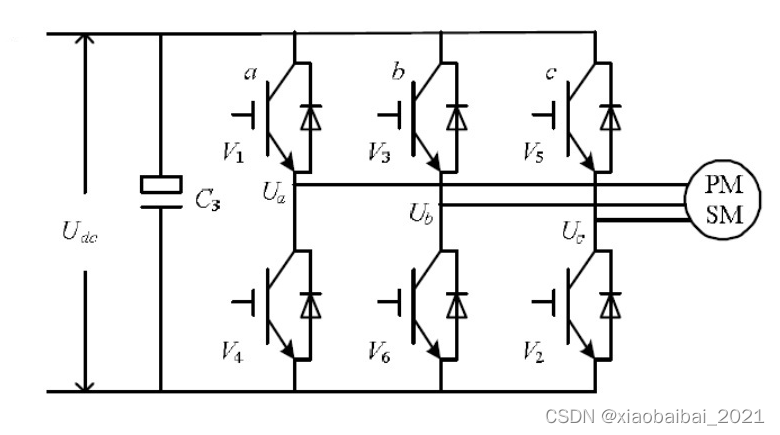
我們將上管導(dǎo)通記為1,下管導(dǎo)通記為0,那么各種導(dǎo)通情況下共有8種導(dǎo)通組合,可產(chǎn)生的電壓矢量U0~U7如下圖所示:
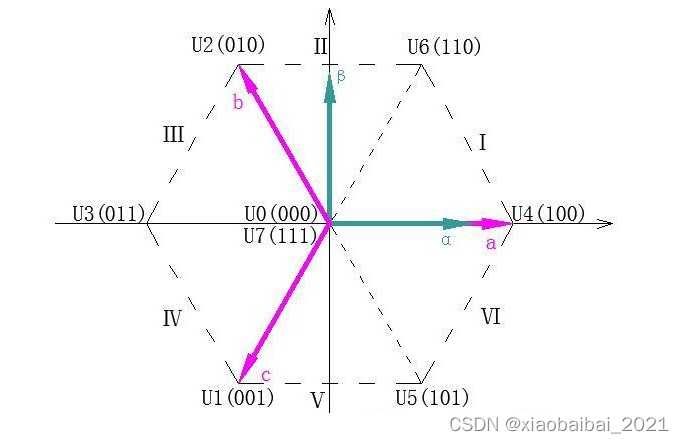
除去000和111兩種電壓矢量為0的情況,可以輸出U1~U6六種電壓矢量。這六個(gè)電壓矢量把平面分成了六個(gè)區(qū),平面內(nèi)的任一電壓矢量,都可以通過它所處區(qū)間兩邊的兩個(gè)電壓矢量來合成。
具體來說,可以分為兩步:先確定在哪個(gè)扇區(qū),再確定各矢量的大小。如下圖:
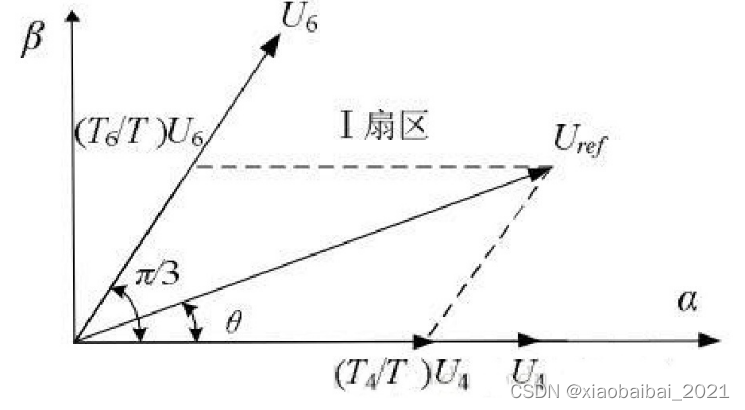
假定要產(chǎn)生的電壓矢量為Uref,Vα、Vβ是兩個(gè)正交軸上的投影,首先可以通過Vα、Vβ的正負(fù)以及大小確定Uref處于哪個(gè)扇區(qū)。
如上圖,若處于U4和U6之間,那么就可以用U4和U6兩個(gè)矢量來合成Uref矢量。
我們可以通過角度θ,來計(jì)算Uref在U4和U6兩個(gè)方向上投影的比例大小,再依據(jù)這個(gè)比例,去設(shè)置一個(gè)周期T之內(nèi)輸出U4和U6電壓矢量的時(shí)間,就能保證輸出的矢量方向與Uref相同;同時(shí),使用PWM脈寬調(diào)制來控制電壓的大小。這樣,我們就可以通過U4和U6來合成Uref電壓矢量了。
假如U4導(dǎo)通時(shí)間為T4,U6導(dǎo)通時(shí)間為T6,則T4和T6的比例大小如下(T為一個(gè)控制周期,m是SVPWM的調(diào)制系數(shù),m=√3*Uref/Udc):
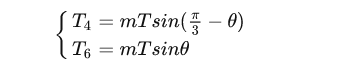
一種劃分各段時(shí)間的方法是,在一個(gè)周期中,把時(shí)間分成如下幾個(gè)片段(實(shí)際切換7次狀態(tài),通常稱為7段式):
在T0時(shí)橋臂導(dǎo)通000,T4時(shí)間導(dǎo)通100,T6時(shí)間導(dǎo)通110,T7時(shí)間導(dǎo)通111,這樣在一整個(gè)周期中,通過控制T4和T6時(shí)間的大小,可以控制合成電壓矢量的方向,通過控制PWM波的占空比可以控制合成電壓矢量的大小,我們的輸出就與Uref一致了。
另外,注意T0時(shí)間段和T7時(shí)間段,都是輸出0矢量。在非零矢量中間插入零矢量的輸出,主要是為了降低諧波分量。選擇000矢量還是111矢量,要看合成電壓在哪個(gè)扇區(qū),哪一種切換的狀態(tài)變化最少。
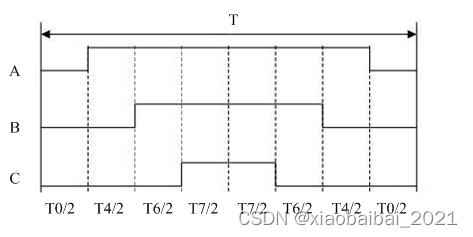
除了上面的7段式,也有5段式控制,如下圖所示:
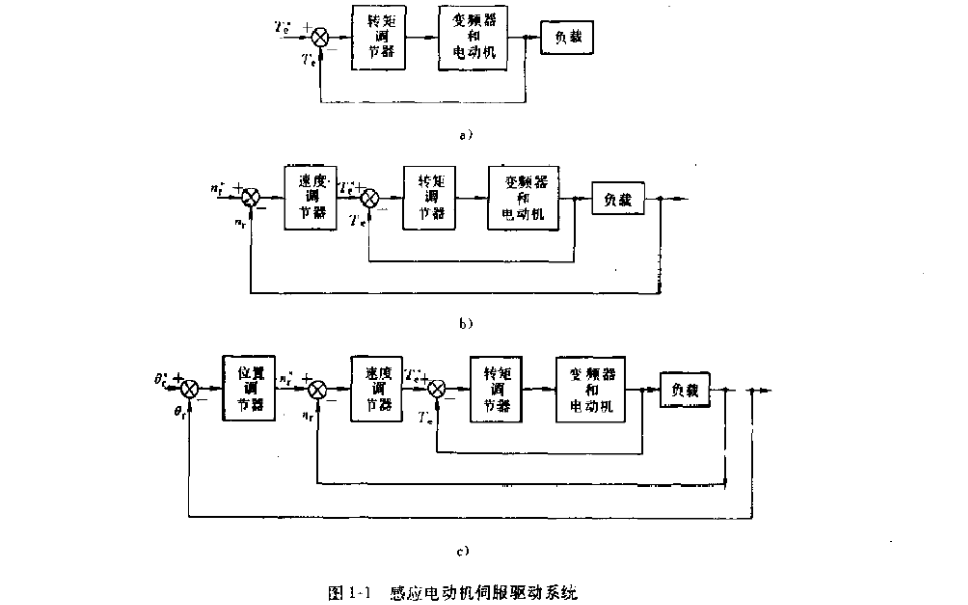
d)雙環(huán)、三環(huán)控制
上面已經(jīng)把FOC最基本的幾個(gè)模塊講完了,但是只講了如何控制電機(jī)的電流,使得電機(jī)平穩(wěn)轉(zhuǎn)動(dòng)。實(shí)際上,在電機(jī)的控制系統(tǒng)中,我們還希望能控制電機(jī)的轉(zhuǎn)速、位置等等。
在b)節(jié)中出現(xiàn)的FOC基本的框圖,只控制了電流,并沒有對電機(jī)的轉(zhuǎn)速、位置進(jìn)行控制,所以稱為電流環(huán)控制:
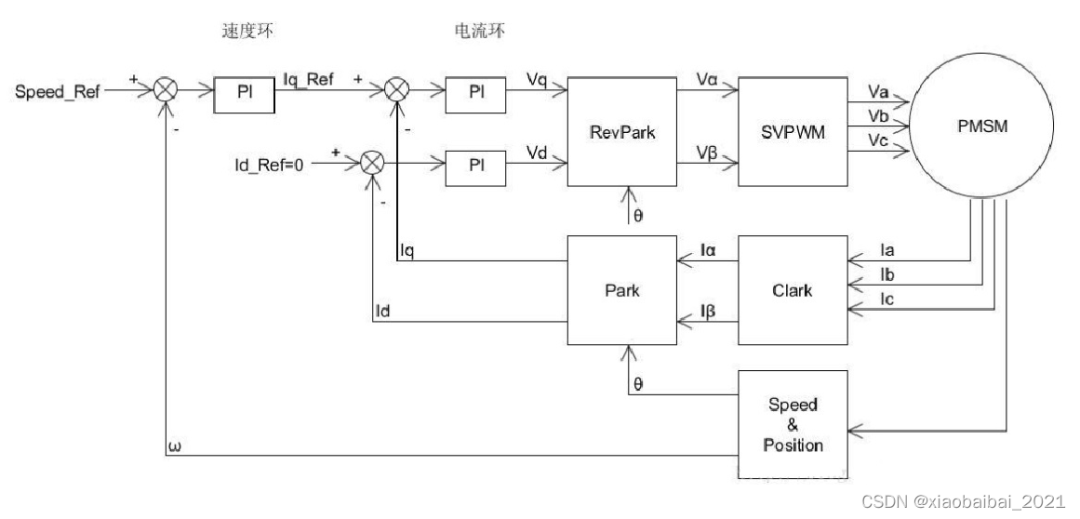
當(dāng)我們在上述系統(tǒng)中,增加轉(zhuǎn)速控制的PI環(huán)節(jié)后,變成了如下框圖形式,雙環(huán)控制:
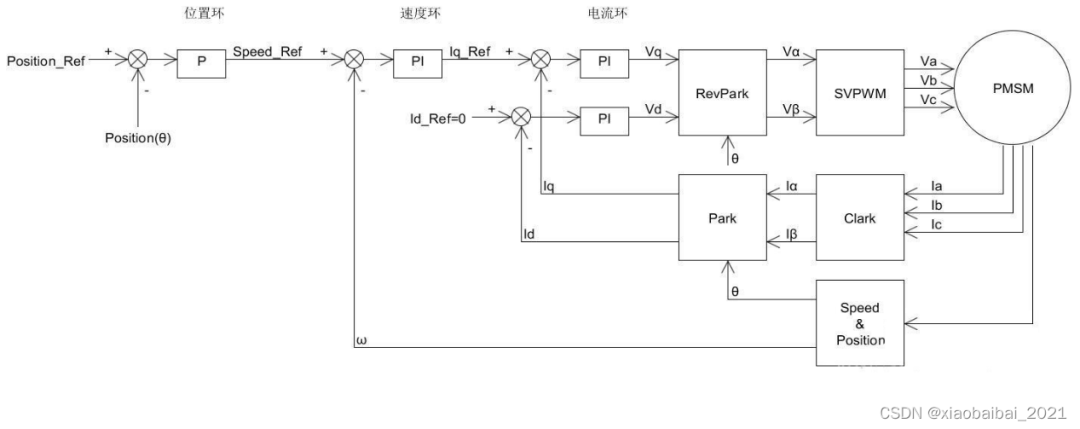
當(dāng)我們在上述系統(tǒng)中,再增加位置控制的P環(huán)節(jié)后,變成了如下框圖形式,三環(huán)控制:
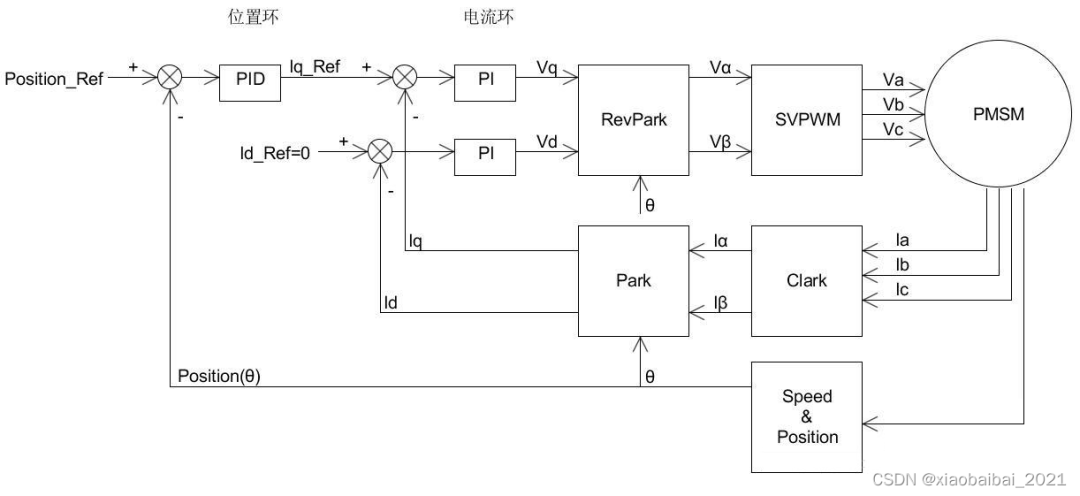
在實(shí)際使用中有時(shí)候電機(jī)的轉(zhuǎn)速很低時(shí),角速度ω的測量不精確,系統(tǒng)中的速度環(huán)會(huì)帶來較大誤差。此時(shí)可以不用速度環(huán),而只用位置和電流雙環(huán)控制:
(注意這里的位置環(huán)用上了完整的PID環(huán)節(jié),是因?yàn)槲恢玫奈⒎志褪撬俣龋胛⒎汁h(huán)節(jié)可以在不使用速度誤差的情況下改善速度控制)
好了,關(guān)于無刷電機(jī)FOC矢量控制的入門知識(shí),就講到這里了。
-
永磁同步電機(jī)
+關(guān)注
關(guān)注
28文章
874瀏覽量
49676 -
無刷電機(jī)
+關(guān)注
關(guān)注
58文章
847瀏覽量
46038 -
矢量控制
+關(guān)注
關(guān)注
2文章
285瀏覽量
32294 -
FOC
+關(guān)注
關(guān)注
20文章
325瀏覽量
42987
發(fā)布評論請先 登錄
相關(guān)推薦
無刷電機(jī)的矢量控制技術(shù)
電機(jī)控制算法及矢量控制基礎(chǔ)知識(shí)最全版本
FOC(電機(jī)矢量控制)與DTC(直接轉(zhuǎn)矩控制)的區(qū)別在哪
磁場定向矢量控制(FOC)的技術(shù)核心
矢量控制PDF電子書免費(fèi)下載
直流無刷電機(jī)FOC控制算法——理論

磁場矢量定向控制算法(FOC)簡介
無刷電機(jī)Foc控制
永磁電機(jī)矢量控制算法合集

BLDC電機(jī)的矢量控制介紹





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論