 基于CH347實現USB擴展SPI/I2C/GPIO Master主機應用方案
基于CH347實現USB擴展SPI/I2C/GPIO Master主機應用方案
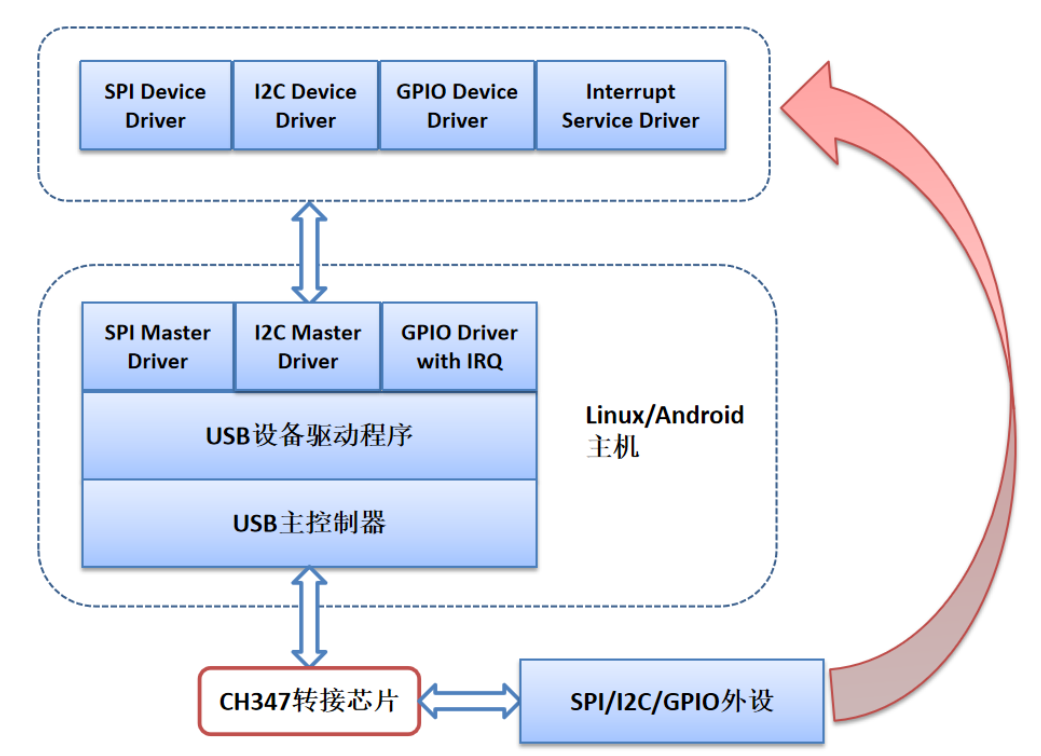
?在安卓/Linux主機上經常會遇到CPU原生SPI/I2C/GPIO Master資源通道不夠或者功性能不滿足實際產品需求的情況,基于USB2.0高速USB轉接芯片CH347,配合廠商提供的USB轉MPSI(Multi Peripheral Serial Line)Master總線驅動(CH34X-MSPI-Master)可輕松實現為系統擴展SPI和I2C總線、GPIO Expander、中斷信號等。
該驅動軟件正常工作后,會在系統下創建新的SPI和I2C Master,擁有獨立的bus num,原SPI和I2C器件的設備驅動可直接掛載到該總線上,無需任何修改。驅動會同時創建GPIO相關資源,各GPIO可通過sysfs文件系統或應用層軟件直接訪問,也可以由其他設備驅動申請該GPIO的訪問權以及申請GPIO對應中斷號并注冊中斷服務程序。
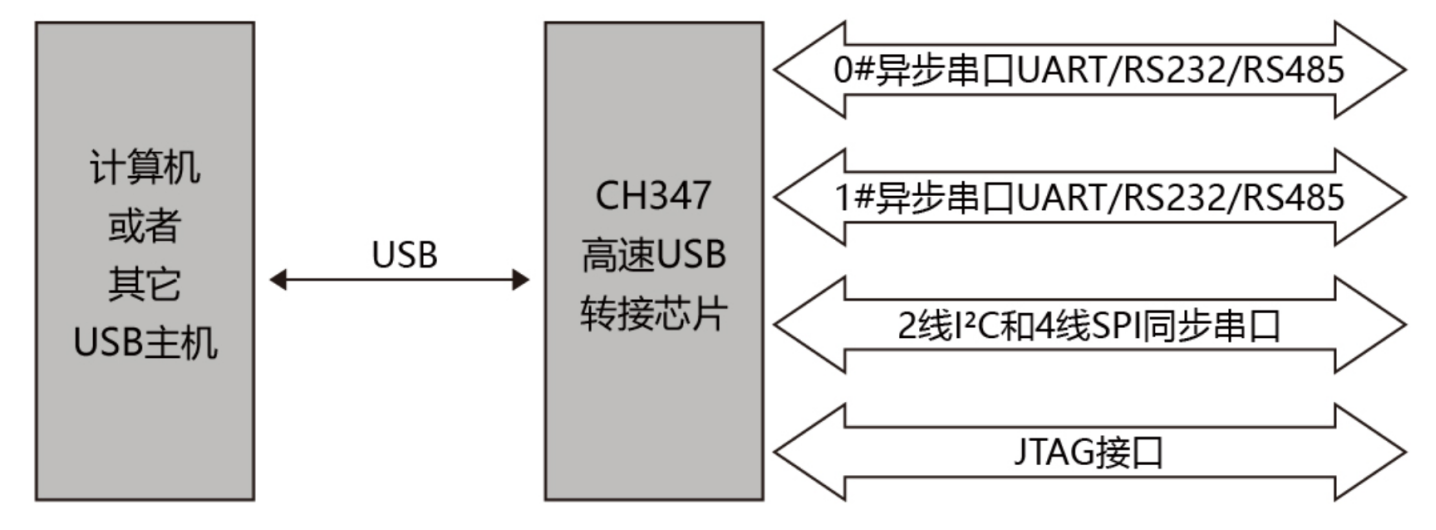
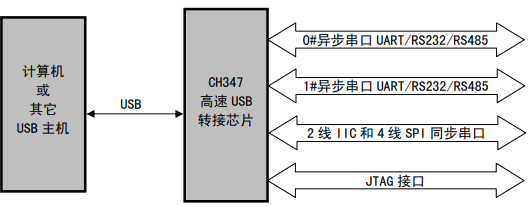
應用框圖:
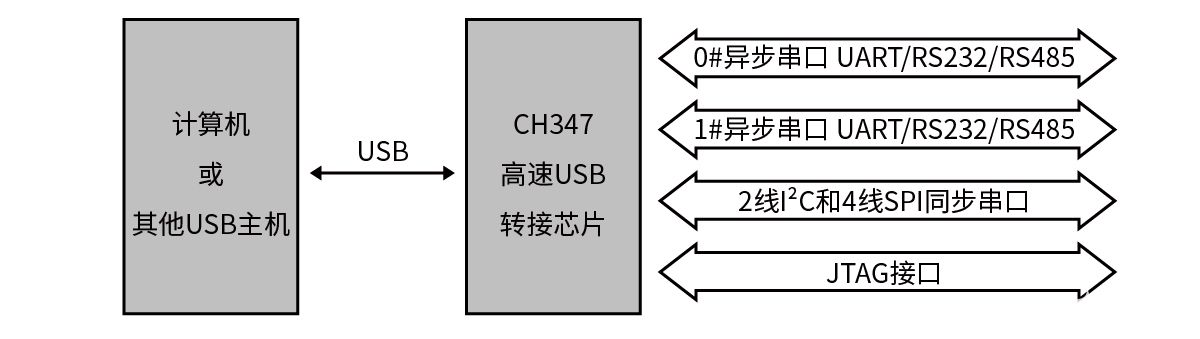
CH347是一款高速USB總線轉接芯片,通過USB總線提供異步串口、I2C同步串行接口、SPI同步串行接口和JTAG接口等。本方案僅使用到CH347的高速SPI、I2C串行總線,以及GPIO功能,使用串口功能需要單獨使用CH343SER串口驅動,使用JTAG功能或SPI和I2C的非總線模式應用可使用CH341PAR多功能USB設備驅動。
驅動特點:
1、支持CH347與CH341總線轉接芯片;
2、支持SPI、I2C、GPIO、IRQ等接口和功能擴展;
3、支持SPI、I2C的bus總線號、GPIO編號、IRQ中斷號的動態分配以及靜態指定;
4、支持自動綁定spi通用設備驅動,創建/dev/spidev*;
驅動概述
該Master驅動支持在Linux/安卓主機上,使用USB轉串口/JTAG/SPI/I2C/GPIO轉換芯片CH347,和USB轉串口/SPI/I2C/GPIO轉換芯片CH341。
驅動僅支持SPI/I2C/GPIO接口,該文檔主要介紹CH347芯片的相關特性。
CH347 SPI接口
| PIN腳 | SPI功能腳 | GPIO復用腳 |
|---|---|---|
| 5 | SCS0 | gpio2 |
| 9 | SCS1 | gpio5 |
| 6 | SCK | gpio0 |
| 8 | MOSI | - |
| 7 | MISO | gpio1 |
SPI接口特性:
SPI模式0/1/2/3
SPI時鐘頻率60MHz/30MHz/15MHz/7.5MHz/3.75MHz/1.875MHz/937.5KHz/468.75KHz
MSB/LSB傳輸
8位/16位傳輸
2路片選
片選高/低有效
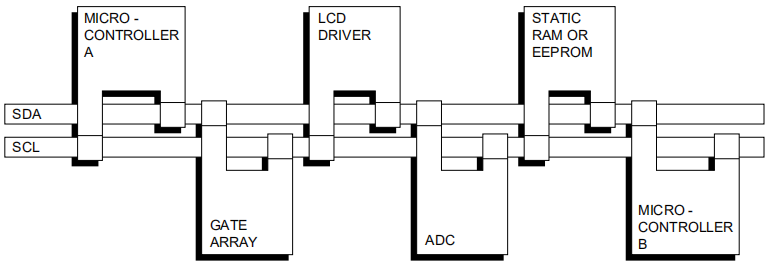
CH347 I2C接口
| PIN腳 | I2C功能腳 | GPIO復用腳 |
|---|---|---|
| 11 | SCL | gpio3 |
| 12 | SDA | - |
CH347支持4種I2C時鐘:20kHz,100kHz,400kHz和750kHz。該驅動會默認將I2C的時鐘初始化為100KHz,當前不支持動態修改該時鐘頻率,若需要修改可以在ch34x_mpsi_i2c_init函數中修改。
在Linux上增加對器件的驅動支持十分方便,只需要將該器件的設備驅動綁定到此Master驅動生成的總線下即可。舉例:
modprobe bmi160_i2c
echo "bmi160 0x68" > /sys/bus/i2c/devices/i2c-$DEV/new_device
或
modprobe tcs3472
echo "tcs3472 0x29" > /sys/bus/i2c/devices/i2c-$DEV/new_device
驅動創建的I2C設備文件在/sys/bus/i2c/devices/i2c-$DEV/ 目錄下
CH347 GPIO接口
| PIN腳 | GPIO復用腳 |
|---|---|
| 15 | gpio4 |
| 2 | gpio6 |
| 13 | gpio7 |
CH347的硬件接口支持GPIO0~GPIO7,考慮到部分引腳被SPI和I2C的接口占用了,此驅動僅開放支持了GPIO4,GPIO6和GPIO7。
驅動操作說明
- 使用“make”或者其他方式編譯此驅動,如果動態編譯成功會生成“ch34x_mpsi_master.ko”驅動模塊
- 使用“sudo make load”或“sudo insmod ch34x_mpsi_master.ko”動態加載驅動,使用此方式加載SPI總線號和GPIO起始序號會自動分配,也可以通過增加參數進行指定。
- 如:“sudo insmod ch34x_mpsi_master.ko spi_bus_num=3 gpio_base_num=60”
- 使用“sudo make unload”或“sudo rmmod ch34x_mpsi_master.ko”卸載驅動
- 使用“sudo make install”將驅動開機自動工作
- 使用“sudo make uninstall”卸載該驅動
使用此驅動,需要確認CH347/CH341已經插入主機并且工作正常,可以使用“lsusb”或“dmesg”指令來確定,CH347/CH341的廠商VID是0x1A86。
如果芯片工作正常,可以使用“ls /sys/class/master”,“ls /sys/class/gpio”指令確認設備節點路徑。
用戶空間訪問
使用SPI接口
一旦驅動加載成功,默認會提供2個關聯到這個新的SPI Bus的SPI Slave設備,以CH347為例:
/dev/spidev0.0
/dev/spidev0.1
根據設備名稱規則 /dev/spidev.,是驅動自動選擇的總線號, 是芯片指定引腳的片選信號。
自linux內核5.15開始綁定到spidev驅動需要主動bind使/dev目錄下設備可用,如bus 0下slave 1:
# echo spidev > /sys/class/spi_master/spi0/spi0.1/driver_override
# echo spi0.1 > /sys/bus/spi/drivers/spidev/bind
對所有ch34x_mpsi_master驅動管理的設備:
# for i in /sys/bus/usb/drivers/mpsi-ch34x/*/spi_master/spi*/spi*.*; do echo spidev > $i/driver_override; echo $(basename $i) > /sys/bus/spi/drivers/spidev/bind; done
標準I/O函數如 open, ioctl 和close 可以直接和該spi slave進行通訊,打開SPI設備:
int spi = open("/dev/spidev0.0", O_RDWR));
設備打開成功后,可以使用 ioctl函數修改SPI配置和傳輸數據等。
uint8_t mode = SPI_MODE_0;
uint8_t lsb = SPI_LSB_FIRST;
...
ioctl(spi, SPI_IOC_WR_MODE, &mode);
ioctl(spi, SPI_IOC_WR_LSB_FIRST, &lsb);
函數 ioctl傳輸數據示例:
uint8_t *mosi; // output data
uint8_t *miso; // input data
...
// fill mosi with output data
...
struct spi_ioc_transfer spi_trans;
memset(&spi_trans, 0, sizeof(spi_trans));
?
spi_trans.tx_buf = (unsigned long) mosi;
spi_trans.rx_buf = (unsigned long) miso;
spi_trans.len = len;
?
int status = ioctl (spi, SPI_IOC_MESSAGE(1), &spi_trans);
?
// use input data in miso
掛載SPI NOR FLASH作為MTD存儲設備
舉例:flash器件掛載到bus 0 chip 0(spi0.0)
# echo spi0.0 > /sys/bus/spi/drivers/spidev/unbind
# echo spi-nor > /sys/bus/spi/devices/spi0.0/driver_override
# echo spi0.0 > /sys/bus/spi/drivers/spi-nor/bind
注:為方便用戶使用,該驅動默認會創建spidev設備,用戶可以使用上面的命令主動解綁與spidev的綁定,或者undefine在ch34x_mpsi_master_spi.c文件中的“SPIDEV”宏定義。
使用GPIO接口
用戶空間方位GPIO,可以使用sysfs,對驅動支持的GPIO,可在如下系統目錄下查看。
/sys/class/gpio/
是定義在驅動變量 ch347_board_config中的GPIO名稱 ,目錄包含
- value 文件用于配置或讀取GPIO電平
- edge文件用于配置GPIO中斷使能以及中斷類型
- direction文件用于改變支持雙向GPIO的引腳方向
注:對文件的讀寫操作,用戶需要指定的讀寫權限。
當前支持的中斷類型包括:
- rising 上升沿中斷
- falling 下降沿中斷
- both 雙邊沿中斷
打開GPIO
使用GPIO前,需要先打開value文件
int fd;
?
if ((fd = open("/sys/class/gpio/value", O_RDWR)) == -1)
{
perror("open");
return -1;
}
是GPIO的名稱
設置GPIO方向
配置GPIO方向為input或output,可在root權限下簡單地寫入in或out字符串到direction文件。
echo out > /sys/class/gpio/gpio4/direction
設置GPIO輸出
文件value打開后,可使用標準I/O函數進行讀寫,配置GPIO輸出電平,可簡單使用write函數,寫入后GPIO會立刻輸出指定電平。
if (write(fd, value ? "1" : "0", 1) == -1)
{
perror ("write");
return -1;
}
讀取GPIO電平
讀取GPIO電平,可簡單使用read函數:
char buf;
?
if (read(fd, &buf, 1) == -1)
{
perror("read");
return -1;
}
?
value = (buf == '0') ? 0 : 1;
每一次讀操作后,需要將文件位置指針需要重新定位到首字節。
if (lseek(fd, 0, SEEK_SET) == -1) {
perror("lseek");
return -1;
}
使用GPIO中斷
完整的使用GPIO中斷功能的驅動例程:
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
?
#define GPIO_NUMBER 509 /* modify with actual gpio number */
?
static irqreturn_t gpio_interrupt(int irq, void *dev_id)
{
printk("gpio_interrupt callback.n");
?
return IRQ_HANDLED;
}
?
static int __init ch34x_gpio_init(void)
{
unsigned long flags = IRQF_TRIGGER_FALLING;
int ret;
int irq;
?
irq = gpio_to_irq(GPIO_NUMBER);
printk("irq: %dn", irq);
ret = gpio_request(GPIO_NUMBER, "gpioint");
if (ret) {
printk("gpio_request failed.n");
goto exit;
}
ret = gpio_direction_input(GPIO_NUMBER);
if (ret) {
printk("gpio_direction_input failed.n");
gpio_free(GPIO_NUMBER);
goto exit;
}
irq_set_irq_type(irq, flags);
ret = request_irq(irq, gpio_interrupt, 0, "gpio_handler", NULL);
printk("%s - request_irq = %d result = %dn", __func__, irq, ret);
?
exit:
return ret;
}
?
static void __exit ch34x_gpio_exit(void)
{
int irq;
?
irq = gpio_to_irq(GPIO_NUMBER);
free_irq(irq, NULL);
gpio_free(GPIO_NUMBER);
printk("gpio driver exit.n");
}
?
module_init(ch34x_gpio_init);
module_exit(ch34x_gpio_exit);
?
MODULE_LICENSE("GPL");
?
注:該驅動默認會創建gpio設備,若需要在內核中使用中斷功能,需要undefine在ch34x_mpsi_master_gpio.c中定義的“SYSFS_GPIO”宏。
CH341支持3種工作模式
模式0: [串口]
模式1: [SPI+ I2C + GPIO]
模式2: [打印口]
CH347支持4種模式
模式0: [串口* 2] VCP/CDC 驅動模式
模式1: [SPI + I2C + 串口* 1] VCP 驅動模式
模式2: [SPI + I2C + 串口* 1] HID 驅動模式
模式3: [JTAG + 串口* 1] VCP 驅動模式
該驅動只可工作在 ch341 模式1 或 ch347 模式1
有技術問題,可以發郵件至技術郵箱: tech@wch.cn
-
usb
+關注
關注
60文章
7980瀏覽量
266095 -
Linux
+關注
關注
87文章
11345瀏覽量
210394 -
主機
+關注
關注
0文章
1010瀏覽量
35309 -
SPI
+關注
關注
17文章
1721瀏覽量
92125 -
GPIO
+關注
關注
16文章
1216瀏覽量
52379
發布評論請先 登錄
相關推薦
GPIO模擬I2C總線的驅動設計與實現
南京沁恒微高速USB轉接芯片 CH347型號
EXAR推出基于I2C和SPI的GPIO擴展芯片
沁恒股份USB Android HOST芯片:CH9343概述
詳細介紹GPIO、I2C、SPI通訊原理以及物理層原理

詳細介紹GPIO、I2C、SPI通訊原理以及物理層原理
高速USB總線轉接芯片CH347概述、特點及封裝
Gowin I2C Master/Slave用戶指南
高速USB轉接芯片 CH347
探索GPIO/ADC/LED/I2C/SPI/USB…的完整世界





 工商網監
工商網監
評論