") 利用人工智能開發(fā)機(jī)器視覺系統(tǒng)可能存在的十大誤區(qū)
利用人工智能開發(fā)機(jī)器視覺系統(tǒng)可能存在的十大誤區(qū)
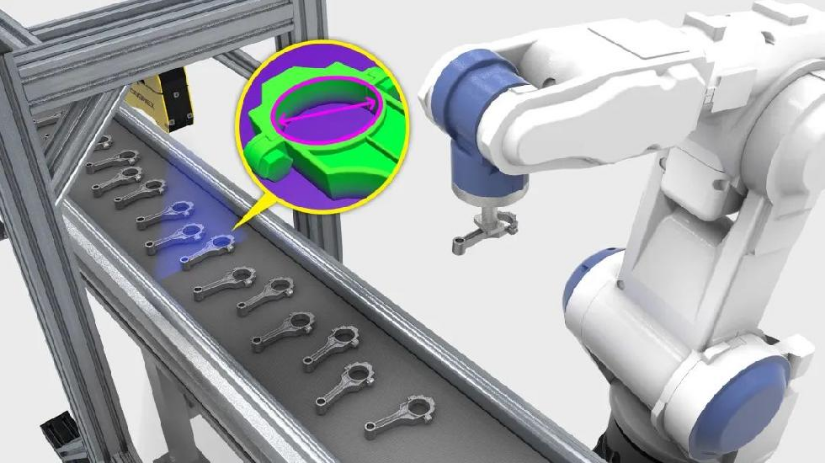
機(jī)器視覺 (MV) 和人工智能 (AI) 為各類前沿應(yīng)用程序提供了寶貴的檢測和分析功能。與所有先進(jìn)技術(shù)一樣,該領(lǐng)域也存在一些陷阱,需要小心防范。
借助機(jī)器視覺,電子系統(tǒng)可以使用一個或多個電子攝像機(jī)、高級光傳感器、模數(shù)轉(zhuǎn)換器 (ADC) 和數(shù)字信號處理器 (DSP) 觀察周圍的環(huán)境和物體。這項(xiàng)技術(shù)的原型已經(jīng)使用數(shù)十年,大多數(shù)應(yīng)用都在醫(yī)療、國防/航空航天和工業(yè)自動化領(lǐng)域。
近年來,3D 傳感技術(shù)不斷改進(jìn),組件模塊日趨緊湊,高質(zhì)量 CMOS 圖像傳感器和功能強(qiáng)大的數(shù)據(jù)處理器價格大幅跳水,機(jī)器視覺的應(yīng)用也呈現(xiàn)出井噴態(tài)勢。美國知名咨詢公司Grandview 研究預(yù)計,全球機(jī)器視覺市場將延續(xù)目前的爆炸式增長,在 2025 年達(dá)到 182.5 億美元,復(fù)合年均增長率 (CAGR) 達(dá) 7.7%。
機(jī)器視覺系統(tǒng)的新市場包括:
工廠自動化和機(jī)器人技術(shù):外觀檢驗(yàn)、診斷、組裝、移動方式機(jī)器人、數(shù)字制作、服務(wù)機(jī)器人、救援機(jī)器人
智能交通系統(tǒng):交通監(jiān)控、自動駕駛車輛、駕駛員安全輔助
安全與執(zhí)法:安全監(jiān)控、攝像網(wǎng)絡(luò)、遙控感應(yīng)、水下和惡劣環(huán)境作業(yè)
生命科學(xué):農(nóng)業(yè)、林業(yè)、漁業(yè)、土木/建筑工程、商業(yè)、體育、時尚、家居等
多媒體:數(shù)據(jù)庫存檔/檢索、文檔、文化/遺產(chǎn)、虛擬現(xiàn)實(shí) (VR)/混合現(xiàn)實(shí) (MR)/增強(qiáng)現(xiàn)實(shí) (AR)、娛樂
生物醫(yī)學(xué):斷層掃描、內(nèi)窺鏡檢查、計算機(jī)輔助診斷、計算機(jī)輔助手術(shù)、計算解剖學(xué)、生物信息學(xué)、護(hù)理
人機(jī)交互:面部/手勢/行為/步態(tài)/凝視分析、生物識別、可穿戴計算、第一人稱視覺系統(tǒng)
咨詢公司Gartner 的最新研究稱,到 2025 年:
集成機(jī)器視覺的高級駕駛員輔助系統(tǒng) (ADAS) 在汽車中的滲透率將從目前的 10% 提高到 35%。
零售商店使用應(yīng)用機(jī)器視覺技術(shù)之后,可以通過針對性促銷活動促使客流量增長 20%,店鋪利潤率增長 10%。
五大消費(fèi)類電子產(chǎn)品制造商銷售的所有智能家電中,20% 將配備機(jī)器視覺技術(shù)。
接近所有高端智能手機(jī)以及 30% 的基礎(chǔ)智能手機(jī)都將具備機(jī)器視覺功能,面部或手勢識別將成為標(biāo)準(zhǔn)的身份驗(yàn)證機(jī)制。
機(jī)器視覺最早可以追溯至上世紀(jì) 50 年代,當(dāng)時任職于 RCA 的 P. K. Weimer、S. V. Forgue 和 R. R. Goodrich 合作開發(fā)了用于早期電子相機(jī)的光導(dǎo)攝像管。光導(dǎo)攝像管借助光電導(dǎo)體作為目標(biāo)材料來捕獲圖像。上世紀(jì) 70 年代末之前,NASA 在大多數(shù)具有遙感功能的無人深空探測器上都部署了 RCA 的攝像管相機(jī)。
若要成功開發(fā)和實(shí)施機(jī)器視覺解決方案,關(guān)鍵是選擇值得信賴的技術(shù)合作伙伴,建立必要的硬件組件和軟件框架,提供視覺算法、攝像頭接口標(biāo)準(zhǔn)、高級分析、人工智能和機(jī)器學(xué)習(xí)。對于任何企業(yè)來說,都有可為之事和不可為之事。我們在此列出了開發(fā)現(xiàn)代機(jī)器視覺解決方案時需要考慮的 10 大注意事項(xiàng)。
1. 人工智能開發(fā),數(shù)據(jù)質(zhì)量先行:機(jī)器視覺系統(tǒng)若要正常運(yùn)行,需要獲取、處理、分析和理解圖像,而這些工作均需依靠人工智能完成。為 實(shí)現(xiàn)這種理解,首先需要編譯信息,亦即讓人工智能用來學(xué)習(xí)的訓(xùn)練數(shù)據(jù)。訓(xùn)練數(shù)據(jù)質(zhì)量越好,人工智能的質(zhì)量就越好。由此也可以提高機(jī)器視覺系統(tǒng)的性能。如果訓(xùn)練數(shù)據(jù)質(zhì)量低劣或數(shù)量不足,將妨礙人工智能和機(jī)器視覺應(yīng)用取得成功。如果缺乏適當(dāng)?shù)挠?xùn)練數(shù)據(jù),即使編程再好,人工智能也無法達(dá)到預(yù)期效果。
2. 功能不斷疊加,漸漸脫離初衷:開始每個項(xiàng)目時,都要設(shè)定一系列合乎實(shí)際的期望和有望實(shí)現(xiàn)的目標(biāo)。人類大腦能夠同時處理來自五種感官的數(shù)據(jù),并根據(jù)這些數(shù)據(jù)立即采取行動,這是真正意義上的一心多用。通過編程處理,機(jī)器通常能夠很好地完成單一任務(wù),但在需要學(xué)習(xí)和執(zhí)行多項(xiàng)任務(wù)時,人工智能可能遇到困難。初始規(guī)劃階段,需要重點(diǎn)關(guān)注關(guān)系到成敗的主要功能。人工智能應(yīng)用的初始版本便執(zhí)行種類繁多的任務(wù),可能會導(dǎo)致任務(wù)無法正確執(zhí)行,并導(dǎo)致初始結(jié)果滿意度欠缺。
3. 視覺的語言:成功的機(jī)器視覺應(yīng)用不僅需要功能強(qiáng)大的硬件,還離不開高超的編程技能。編程可以采用人工智能框架和編碼語言的形式。人工智能框架可以簡化、加速人工智能應(yīng)用開發(fā),包括機(jī)器學(xué)習(xí)、深度學(xué)習(xí)、神經(jīng)網(wǎng)絡(luò)和自然語言處理 (NLP)。人工智能框架可以充當(dāng)人工智能系統(tǒng)的開發(fā)模板。與從頭開始開發(fā)人工智能應(yīng)用相比,這種方法的開發(fā)、部署和管理難度都大大降低。有幾種編程語言可以與人工智能配合使用,每種語言都有獨(dú)到的優(yōu)勢。其中包括 Caffe、Python、Pytorch、TensorFlow、C++、Lisp、Java、R、Prolog 和 Model Zoo。
在機(jī)器視覺應(yīng)用規(guī)劃階段,必須確定使用內(nèi)部資源還是外包編程。程序員的技能水平如何?打算使用哪種編程語言?所選編程語言的最佳開發(fā)工具是哪種?人工智能程序和后續(xù)更新的編譯難度如何?如何發(fā)布更新?
4. 選擇合適的硬件主器件:選擇運(yùn)行機(jī)器視覺人工智能應(yīng)用程序的硬件時,存在諸多選項(xiàng)。現(xiàn)場可編程邏輯門陣列 (FPGA)、圖形處理單元 (GPU) 以及微控制器 (MCU) 都各有所長。
FPGA: FPGA 是非常強(qiáng)大的處理單元,配置后可以滿足幾乎所有應(yīng)用程序的需求。可以創(chuàng)建定制的 FPGA 架構(gòu)來處理特定的應(yīng)用程序。與其他選項(xiàng)(如 GPU 和 CPU)相比,可以實(shí)現(xiàn)更高的性能、更低的成本和更好的能效。
GPU: GPU 是專用處理器,主要用于處理圖像和視頻。與 CPU 相比,其處理單元更簡單,但承載更多的內(nèi)核。因此,GPU 非常適合需要并行處理大量數(shù)據(jù)的應(yīng)用程序,例如圖像像素或視頻編解碼器。然而,GPU 也存在一些局限性:能耗高,同時由于使用 CUDA 和 OpenCL 等語言進(jìn)行編程,靈活性不及 CPU。
CPUs: CPU 的核心數(shù)量有限,無法快速處理人工智能所需的大量數(shù)據(jù)。因此,CPU 僅適用于有效批量較小的小模型。CPU 的優(yōu)點(diǎn)是易于編程、成本較低,同時廣泛支持各類編程框架。
除此之外,選擇硬件時還需要考慮能效、設(shè)備移動性、IO 數(shù)量、操作環(huán)境,以及最重要因素 - 成本。最初的計劃階段全面調(diào)查并周全考慮,可以避免日后的麻煩。借助所有的處理器和支持組件,獲取足夠的處理能力,為將來需要實(shí)現(xiàn)的功能做好鋪墊,同時預(yù)備足夠的板載內(nèi)存,用于處理固件升級和人工智能算法增長。
5. 圖像傳感器和照明:CMOS 傳感器的前照式 (FSI) 和背照式 (BSI) 技術(shù)取得了巨大的進(jìn)步,即使在低光照水平下也可以獲得更高分辨率的圖像。適當(dāng)?shù)恼彰饕彩侵匾目紤]因素。所有照明性能的基礎(chǔ)都可以歸結(jié)為三種主要的圖像傳感器特性:量子效率 (QE)、暗電流和飽和容量。量子效率是設(shè)備為特定數(shù)量的入射光子所產(chǎn)生的電荷的比率。由于 QE 在不同的波長上會發(fā)生變化,因此最好將其繪制為波長的函數(shù)。由此,可以實(shí)現(xiàn)設(shè)備靈敏度的精準(zhǔn)測量。安裝在相機(jī)內(nèi)時,由于外部光學(xué)和電子效應(yīng),相機(jī)的最大 QE 應(yīng)小于傳感器。
此外,暗電流和飽和容量也是機(jī)器視覺系統(tǒng)設(shè)計的重要考慮因素。暗電流測量 CMOS 成像器內(nèi)熱產(chǎn)生的電子數(shù)量變化,以及同時可能帶來的噪聲。飽和容量表示單個像素可以存儲的電子數(shù)。盡管這些參數(shù)通常未在相機(jī)制造商的數(shù)據(jù)表中說明,但可以與QE測量值一起,用以計算最大信噪比 (S/N)、絕對靈敏度和應(yīng)用的動態(tài)范圍。
適當(dāng)?shù)恼彰饔兄谔岣邫C(jī)器視覺應(yīng)用程序的準(zhǔn)確性和效率。照明需要考慮的其他因素包括波長(例如紅外線)、固定照明甚至照明放置。研究證明,直接照射到機(jī)器視覺系統(tǒng)攝像機(jī)上的光源和反射物會降低物體檢測的準(zhǔn)確性。
6. 背景識別:背景可能給機(jī)器視覺系統(tǒng)帶來特殊的問題。想象一下,安全系統(tǒng)無法偵察到壞人深色外套中的黑色槍支。同樣,工廠環(huán)境中的反光金屬物體也可能導(dǎo)致視覺檢測算法無法正常運(yùn)行,從而出現(xiàn)此類困難。輔助算法可以通過關(guān)注電磁波 (EM) 光譜的不同波長(例如紅外和自適應(yīng)光)來緩解這種情況。
7. 對象的定位和方向:人工智能可以幫助機(jī)器視覺解決方案識別從訓(xùn)練數(shù)據(jù)中學(xué)習(xí)到的物體。如果您使用相同的物體但更改其方向,一些機(jī)器視覺系統(tǒng)就會出錯。這種情況可以通過為人工智能提供精確的訓(xùn)練集來緩解,但也會導(dǎo)致數(shù)據(jù)量變得密集。
8. 物體縮放:我們分別從兩英尺遠(yuǎn)和 10 英尺遠(yuǎn)的距離看籃球時,知道兩次看到的是同一物體,只是距離不同。在這一點(diǎn)上,多樣化的訓(xùn)練集和人工智能的準(zhǔn)確測試有助于確保某個距離的物體可以被正確識別。鏡頭和焦距的選擇也直接影響到應(yīng)用程序的性能。大多數(shù)機(jī)器視覺系統(tǒng)都讀取像素值,但若要成功部署到移動應(yīng)用,縮放方面的考慮同樣不可或缺。
9. 物體變形:機(jī)器視覺系統(tǒng)能夠識別存在微小偏差的同一物體,這種能力在機(jī)器視覺應(yīng)用中至關(guān)重要,特別是在交通和安全方面。對于應(yīng)用的準(zhǔn)確性和操作安全性而言,識別四肢有關(guān)節(jié)的行人極其重要。此處需要再次強(qiáng)調(diào)為人工智能學(xué)習(xí)提供高質(zhì)量訓(xùn)練集的必要性,但同樣導(dǎo)致數(shù)據(jù)量更密集。
10. 動作和運(yùn)動:快速運(yùn)動/移動會給機(jī)器視覺系統(tǒng)帶來問題。對于安全性至關(guān)重要的應(yīng)用而言,這可能帶來致命的危險。這種情況可以通過選擇適當(dāng)?shù)某上衿骺扉T、特殊的編程算法和照明來緩解。廉價的圖像傳感器通常使用卷簾快門,這會破壞快速移動的圖像。全局快門可能增加圖像傳感器的成本,但卻是適當(dāng)捕捉快速運(yùn)動的必要功能。預(yù)測和準(zhǔn)備能力是判斷人類智力的兩大標(biāo)準(zhǔn)。人工智能應(yīng)用程序同樣如此。
審核編輯 :李倩
-
機(jī)器視覺
+關(guān)注
關(guān)注
162文章
4406瀏覽量
120739 -
人工智能
+關(guān)注
關(guān)注
1796文章
47683瀏覽量
240311 -
信號處理器
+關(guān)注
關(guān)注
1文章
254瀏覽量
25351
原文標(biāo)題:【深度】利用人工智能開發(fā)機(jī)器視覺系統(tǒng) 可能存在的十大誤區(qū)
文章出處:【微信號:指南車機(jī)器人科技,微信公眾號:指南車機(jī)器人科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦

【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+初品的體驗(yàn)
嵌入式和人工智能究竟是什么關(guān)系?
安森美機(jī)器視覺系統(tǒng)解決方案
risc-v在人工智能圖像處理應(yīng)用前景分析
報名開啟!深圳(國際)通用人工智能大會將啟幕,國內(nèi)外大咖齊聚話AI
FPGA在人工智能中的應(yīng)用有哪些?
機(jī)器視覺和人工智能的關(guān)系與應(yīng)用
CCD機(jī)器視覺系統(tǒng)的工作原理和特性
機(jī)器視覺系統(tǒng)與運(yùn)動控制系統(tǒng)的區(qū)別
機(jī)器視覺系統(tǒng)的工作原理和應(yīng)用領(lǐng)域
5G智能物聯(lián)網(wǎng)課程之Aidlux下人工智能開發(fā)(SC171開發(fā)套件V2)
5G智能物聯(lián)網(wǎng)課程之Aidlux下人工智能開發(fā)(SC171開發(fā)套件V1)
機(jī)器視覺系統(tǒng)和人工智能有什么區(qū)別





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論