 如何識別不同類型的抖動
如何識別不同類型的抖動
NIST將抖動定義為“數字信號的重要時刻從其理想位置的短期相位變化”。我們將抖動想象為波的位置變化,形成從它應該在的位置上升或下降沿(“它應該在哪里”的很多意思是導致設計人員可能必須考慮的不同類型的抖動 - 稍后會詳細介紹)。術語抖動保留用于 10Hz 以上的信號相位變化 – 低于 10Hz 時,術語 Wander 適用。隨著振蕩器信號的倍增和濾波,抖動也會倍增和濾波,系統的時序預算會迅速消失。正是在這里,我們看到了抖動的問題,因此設計人員必須充分了解時序抖動及其對系統設計的影響。
什么原因導致抖動?
抖動可能是振蕩器本身固有噪聲導致信號相位或幅度調制的結果,也可能是系統中的其他干擾的結果,例如電源噪聲、熱噪聲、振動、串擾或其他組件的干擾以及許多其他因素。
我們如何對抖動進行分類?
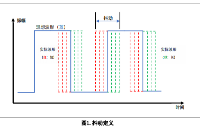
在大多數討論中,抖動分為兩大類之一:確定性抖動和隨機抖動(DJ和RJ)。右圖顯示了抖動的快速分析,包括對 DJ 和 RJ 不同組件的簡要介紹。
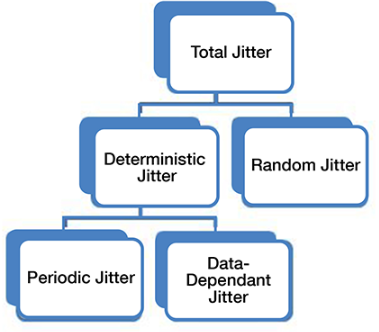
隨機抖動 隨機抖動
是一種始終存在的現象,無法始終預測。設備經歷的隨機抖動是多個次要因素的組合,包括熱噪聲、走線寬度變化、散粒噪聲、閃爍等。隨機抖動是一種寬帶隨機高斯過程,有時被稱為固有噪聲,因為它始終存在。隨機抖動具有無限的正態概率分布函數 (PDF),并且無法保持明確定義的峰峰值。相反,它通常由其標準偏差來描述。隨機抖動也獨立于其他抖動源,因為它的存在不會放大其他抖動源的影響。
確定性抖
動 確定性抖動(有時稱為有界抖動)通常被定義為,如果系統的所有組件都已知,那么您可以準確預測在每個過渡邊沿將觀察到的抖動量。由于確定性抖動由所有其他非隨機形式的抖動組成,因此它不遵循一般分布函數。非隨機抖動源的數量有限,因此我們可以推斷出它有一個有界的 PDF。這使我們能夠通過峰峰值(可量化值)來表征確定性抖動。
確定性抖動可以進一步分為兩個子類別:周期性抖動和數據相關抖動。周期性抖動包括固定頻率或周期下的任何抖動。它易于準確測量,并在頻譜中顯示為不同的峰值。周期性抖動的一些很好的例子是電源噪聲和來自相鄰數據線的串擾。數據相關抖動包括其幅度受信號占空比或時鐘邊沿變化影響的所有抖動。例如,在數據流中,交替位 (01010101) 的 0 和 1 之間的轉換與遵循一長串相同位 (00011001) 的轉換將有所不同。由于時鐘和振蕩器中不存在這種類型的行為,因此這種形式的確定性抖動被認為是非因素。
有許多方法可以對抖動進行分類,雖然了解您觀察到的抖動類型很重要,但能夠測量不同類型的抖動同樣重要,如果不是更重要的話,以便可以努力過濾/消除它們并降低系統的整體誤碼率 (BER)。
審核編輯:郭婷
-
電源
+關注
關注
184文章
17836瀏覽量
251796 -
振蕩器
+關注
關注
28文章
3847瀏覽量
139361 -
濾波
+關注
關注
10文章
669瀏覽量
56773
發布評論請先 登錄
相關推薦
請問公交刷卡設備怎樣對不同類型的卡片進行識別?
什么是不同類型的生物識別傳感器?
時鐘抖動的基礎
了解不同類型的PCB及其優勢
抖動定義和測量





 工商網監
工商網監
評論