 ROS/ROS 2 介紹
ROS/ROS 2 介紹
ROS是機器人操作系統(Robot Operating System)的英文縮寫。ROS是用于編寫機器人軟件程序的一種具有高度靈活性的軟件架構。ROS的原型源自斯坦福大學的STanford Artificial Intelligence Robot (STAIR) 和 Personal Robotics (PR)項目。
機器人的工業界和學術界在軟件工具的使用上是有明顯的分歧的。由于機器人的工業界并不像消費類電子這樣出貨量巨大,所以絕對高的技術壁壘和封閉的生態是十分常見的。為了提高自己的技術壁壘,這些公司往往會自己設計一整套封閉的軟硬件,以達到讓其他人(競爭對手或開發者)無法用自己的工具替換之的目的。而學術界,學生和老師們為了減少重復造輪子的工作,往往會擁抱開源社區,選擇現有的工具進行開發和研究,最廣為人知的便是ROS(Robot Operating System)。
ROS是什么
ROS/ROS 2并不是一個軟件,而是一系列軟件的集合。一般我們稱之為軟件解決方案堆棧。包含如硬件驅動程序、網絡模塊、通信架構和機器人算法實現等等。ROS將所有這些功能包放在一個保護傘下,因此開發人員無需重新造輪子。
ROS并不是一個操作系統,而一般稱之為元操作系統,即基于操作系統以上的類操作系統。
ROS并不是一個中間件,因為它實現了包括感知、導航、控制、運動規劃和仿真等多種功能。
ROS
ROS1.0版本發布于2010年,基于PR2機器人開發了一系列機器人相關的基礎軟件包。隨后ROS版本迭代頻繁,ROS的版本一般會隨著Ubuntu系統長期支持(LTS)版本而更新,其中ROS目前最新的版本都已經適配到Ubuntu 20.04 LTS。ROS僅在Ubuntu上進行CI測試,但是社區成員積極支持其他Linux版本、Mac OS X、Android、Windows,使得ROS可以兼容,但僅提供有限制性的功能支持。
ROS的歷史版本
| ROS版本 | 發布時間 | Ubuntu版本 |
|---|---|---|
| ROS Noetic Ninjemys | May 23rd, 2020 | Ubuntu 20.04(Focal) |
| ROS Melodic Morenia | May 23rd, 2018 | Ubuntu 18.04(Bionic) |
| ROS Lunar Loggerhead | May 23rd, 2017 | Ubuntu 17.04(Zesty) |
| ROS Kinetic Kame | May 23rd, 2016 | Ubuntu 16.04(Xenial) |
| ROS Jade Turtle | May 23rd, 2015 | Ubuntu 15.04 (Vivid) |
| ROS Indigo Igloo | July 22nd, 2014 | Ubuntu 14.04 (Trusty) |
| ROS Hydro Medusa | September 4th, 2013 | Ubuntu 12.04 (Precise) |
| ROS Groovy Galapagos | December 31, 2012 | Ubuntu 12.04(Precise) |
| ROS Fuerte Turtle | April 23, 2012 | Ubuntu 10.04(Lucid) |
| ROS Electric Emys | August 30, 2011 | Ubuntu 10.04(Lucid) |
| ROS Diamondback | March 2, 2011 | Ubuntu 10.04(Lucid) |
| ROS C Turtle | August 2, 2010 | Ubuntu 9.04(Lucid) |
| ROS Box Turtle | March 2, 2010 | Ubuntu 8.04(Hardy) |
ROS的優缺點對比
ROS為我們開發機器人帶來了許多方便,然而它也確實存在一些問題:
| 優點 | 缺點 |
|---|---|
| 松散耦合的機制提供框架 | 通信實時性能有限 |
| 豐富的機器人功能庫 | 系統穩定性尚不滿足工業級要求 |
| 龐大的用戶群體 | 安全性上沒有防護措施 |
| 免費開源 | 僅支持Linux(Ubuntu) |
| 便利的數據記錄、分析、仿真工具 | 核心機制的性能沒有優化占用資源 |
ROS的成熟案例
ROS已經走過十個年頭,伴隨著機器人技術的大發展,ROS也得到了極大的推廣和應用。盡管ROS還存在不少局限性,但無法掩蓋ROS的鋒芒,社區內的功能包還是呈指數級逐年上漲,為機器人開發帶來了巨大的便利。不少開發者和研究機構還針對ROS的局限性進行了改良,但這些局部功能的改善往往很難帶來整體性能的提升,在行業內也積累了大量成熟的應用:
機械臂控制器中領軍企業KEBA,他們的控制器已經支持ROS :

美國NASA基于ROS開發的Robonaut 2:
百度apollo無人車的底層是基于ROS開發的:
總體來說,ROS更適合科研和開源用戶使用,如果在工業場景應用(例如無人駕駛)還需要做優化和定制,目前ROS已經停止更新,機器人開發者對新一代ROS的呼聲越來越大,ROS2.0的消息也不絕于耳。
ROS 2
ROS無法真正進入產業界,也自然無法產品化。為了解決這一問題,社區提出了ROS 2。使得ROS具備產品化的特性,包括實時性、適應于全平臺、適用于性能低的硬件(MCU+RTOS)、分布式、數據加密和現代編程語言的支持。
ROS 2的歷史版本
| ROS 版本 | 發布時間 | Ubuntu版本 |
|---|---|---|
| Humble Hawksbill | May 23rd, 2022 | TBD |
| Galactic Geochelone | May 23rd, 2021 | Ubuntu 20.04(Focal) |
| Foxy Fitzroy | June 5th, 2020 | Ubuntu 20.04(Focal) |
| Eloquent Elusor | November 22nd, 2019 | Ubuntu 18.04 (Bionic) |
| Dashing Diademata | May 31st, 2019 | Ubuntu 18.04 (Bionic) |
| Crystal Clemmys | December 14th, 2018 | Ubuntu 16.04 (Xenial) |
| Bouncy Bolson | July 2nd, 2018 | Ubuntu 16.04 (Xenial) |
| Ardent Apalone | December 8th, 2017 | Ubuntu 16.04 ( Xenial) |
實時化與分布式
為了解決消息間通訊的去中心化和實時性問題,ROS 2引入了Data Distribution Service(DDS),一種已經廣泛應用于國防、民航、工業控制等領域,成為分布式實時系統中數據發布/訂閱的標準解決方案。如下圖所示,左邊是ROS 1,右邊是ROS 2。
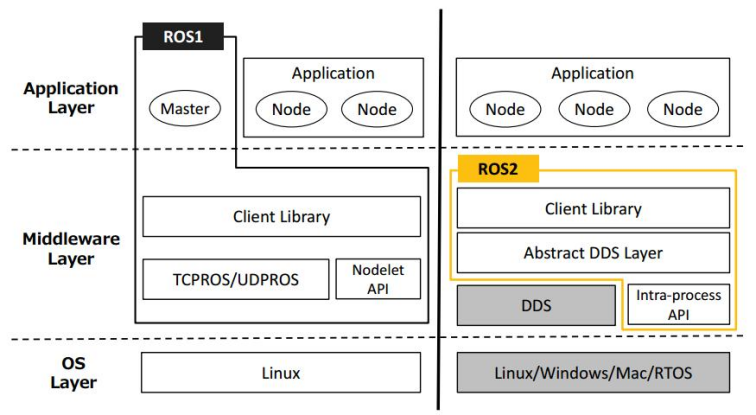
在ROS 1中,用戶的每個節點,無論是同一設備還是不同設備,必須已知Master節點的IP,并且全部依賴于Master節點進行通訊,一旦Master節點發生故障或該設備發生故障,則整個環境的所有節點功能盡失。無法恢復。也正因為這一點,ROS 1無法應用于正式的產品。
ROS 2引入了基于DDS的去中心化的數據通訊方式,不同節點可以通過未知IP的方式進行通訊,也進而有助于解決多機器人系統的問題。并且ROS 2也引入了 Quality of Service的機制,通過設定不同的服務質量來保障某些較差網絡環境下也可以具備良好的通訊效果。
實時性
而對于實時性,由于DDS在諸多工業和產業有諸多應用,具有良好的生態,其性能毋庸置疑。如下圖的測試結果:
測試設備為兩臺PowerEdge R330 e34s
OS: Ubuntu 18.04.2 LTS bionic
Architecture: x86_64
CPU(s): 8
Thread(s) per core: 2
Model name: Intel(R) Xeon(R) CPU E3-1230 v6 @ 3.50GHz
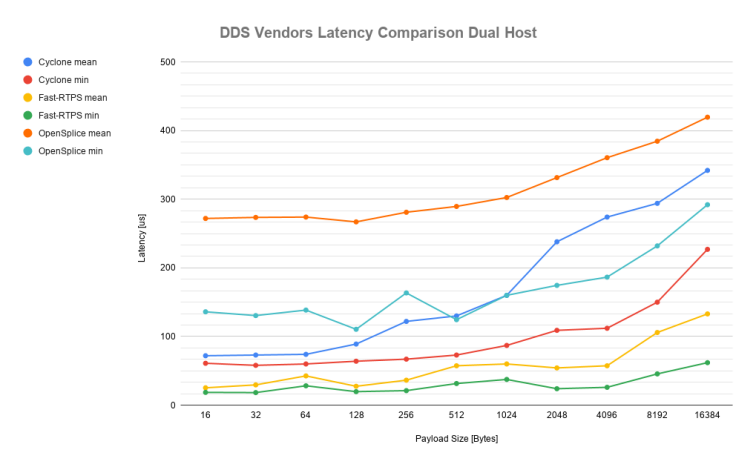
以Fast-RTPS為例,可以看到從延時上,在該雙設備間通訊中可以穩定在100μs以下,而吞吐量的帶寬也達到了750Mbit/s以上。詳細的跑分數據可以參考Fast-RTPS vs Cyclone DDS vs OpenSplice DDS進行了解,且同設備內的通訊效率會遠超該結果。
數據加密
ROS 2在DDS的基礎之上引入了SROS的概念,設計文檔參考ROS 2 DDS-Security integration,即所有的ROS 2消息均可通過SROS進行加解密、鑒權、授權控制、Log和數據標記的權限控制等。基于ROS 2的原本設計邏輯,我們甚至可以將數據的密鑰生成和存儲放到ARM TEE OS中,以實現較高安全的數據保證
現代編程語言的支持
由于ROS 1的最初發行版在2007年,長期以來的支持和眾多開發庫的支持導致很多語言的新特性并不能良好地應用。比如對于Python,直至2020年發布的Noetic版本中才首次支持了Python 3,而Python 2在2020年1月便已經停止進行支持了。再如C++,ROS 1是基于C++ 03實現的,對于C++ 11的支持并不好,更不用談C++ 14和C++ 17的支持。
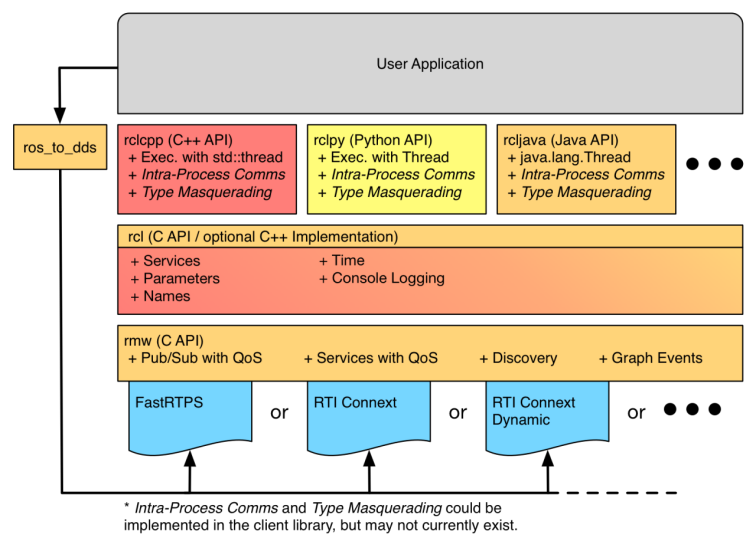
ROS 2則完全支持Python 3,并基于現代C++編寫。并基于其松耦合的方式,還支持Java和Rust等編程語言。如下圖User Application下面那一行所示,只要開發者愿意,可以支持任何編程語言。
靈活的機制
ROS 2提供了一種基于生命周期的管理模式, 即每個節點的運行狀態是完全可控的。參考設計文檔Managed nodes的闡述。所有Managed節點都可以在運行時進行實時配置、管理、關閉和啟動,并在出錯時可以由管理節點進行喚醒和重置。這種方式保證了整個系統的穩定性和魯棒性,也提高了系統出錯后恢復到正常的能力。
ROS 2在運行時可以更換DDS中間件,也可以在不同DDS中間件的實現間進行通訊。
5G的支持
ROS 2在Ericsson的推動下,正在商討5G的ROS 2通訊方案的制定和實現。
全新的生態
繼承ROS 1廣博的開源生態資源,ROS 2的發布激起了大家對于ROS產品化的熱情,許多公司都向ROS 2貢獻方案和代碼,包括但不限于Intel、NVIDIA、Ericsson等。
除了貢獻新的代碼,ROS 1的優秀工具也都被完全繼承到ROS 2里,如Moveit、Rviz和rosbag等。并且有些模塊,如navigation(導航),在開發者的改進中升級為navigation2,改善了諸多問題,提高了使用的便利性。
多種通訊方式
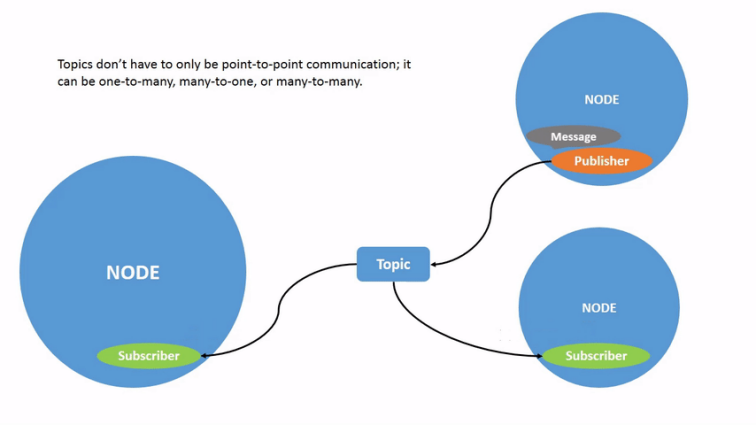
ROS 2 Topic通訊節點和節點之間進行通訊的橋梁,節點可以同時發布和接收話題,節點和話題之間是多對多關系。
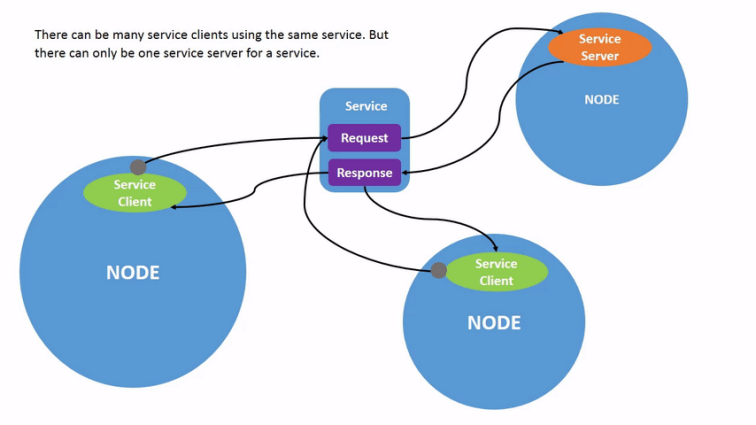
Service(服務)是ROS圖上節點通信的另一種方法,服務基于呼叫響應模型,而不是主題的發布者-訂閱者模型。服務端和客戶端之間,是一對一或一對多關系。
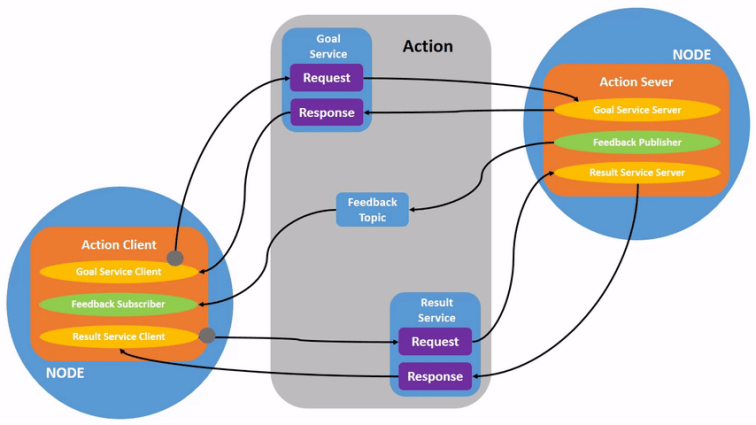
Action是ROS 2中用于長時間運行任務的通信類型之一,它們由三部分組成:目標,結果和反饋。
ROS 2的成熟案例
美軍投資的Ghost Robotics,其四足機器人使用了Eloquent版本的ROS 2進行開發,DDS方案選用的是商用的Cyclone DDS。
Mission Robotics的水下機器人(ROV),使用了Foxy版本的ROS 2進行開發。
總結
汽車產業真正的革命已經開始,軟件定義汽車的時代已經到來。汽車正加速從從機械設備向高度數字化、信息化的智能終端轉變,涉及領域龐大并且復雜。一輛自動駕駛的汽車,從某種意義上來說,也是一個自動駕駛的機器人,理所當然的可以是使用ROS 2進行開發,ROS 2提供了大量基礎組件,大大便利了包括導航算法、自動駕駛算法和一些AI算法的部署。當然ROS 2仍然有很多缺陷,ROS 2的調度模型無法搶占,有時候優先級高的調度實例可能被低優先級的調度阻塞,還沒有一家汽車行業公司利用ROS 2將產品落地。
面對這些挑戰,極氪的軟件及電子中心大膽嘗試,基于ROS 2的通訊框架和平臺架構,進行基于SOA架構的汽車操作系統的開發,并且取得不錯的測試效果。極氪的軟件及電子中心的在一直在前沿技術方面做深入探索,致力于打造ZEEKR OS整車操作系統,也歡迎各位有志之士加入我們,共同探索下一代汽車操作系統。
-
機器人
+關注
關注
211文章
28643瀏覽量
208424 -
操作系統
+關注
關注
37文章
6896瀏覽量
123749 -
ROS
+關注
關注
1文章
280瀏覽量
17099
發布評論請先 登錄
相關推薦
Micro-ROS:把ROS2放在MCU上
系統鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開發環境嗎?
什么是ROS?ROS產生、發展和壯大的原因和意義
ROS的含義與機器人操作系統ROS的介紹
ROS基本介紹

ROS1的通信架構的基礎通信方式及相關概念

Unity與ROS鏈接介紹

ROS核心框架介紹

ros的基本概念是什么
ROS2中自帶例程測試

在TogetherROS中如何安裝ROS2功能包






 工商網監
工商網監
評論