 高精度地圖的路,還能走多遠?
高精度地圖的路,還能走多遠?
3月23日,華為在2023春季旗艦新品發布會上,華為終端BG CEO余承東透露,華為即將上車搭載的高階自動駕駛系統ADS 2.0版本,將不依賴于高精度地圖,而是主要通過車端融合感知來進行環境識別。就在之前,理想汽車首席執行官李想也發出了一封全員信,信中表示,理想汽車的端到端訓練城市NOA導航輔助駕駛(不依賴HDMAP,即不依賴高精地圖)將會在2023年底開始落地。而小鵬汽車董事長兼首席執行官何小鵬在小鵬汽車全員會上也明確提出,2023年的X-NGP輔助駕駛要拋掉高精地圖。高精度地圖,曾被眾多汽車工程師認為是汽車的“上帝視角”和“千里眼”,也曾被很多人稱作是自動駕駛技術的重要“拐杖”,而隨著自動駕駛技術的發展,越來越多汽車主機廠正在著力于扔掉這跟“拐杖”,希望讓自動駕駛走向“重感知”的道路上來,高精度地圖正在從自動駕駛必需品,逐漸走向邊緣化。
什么是高精度地圖?
不同于普通的電子導航地圖,高精度地圖擁有更高精度(可以達到厘米級)、更多數據維度、定位也更加精準。垂直方向的信息也可以在高精度地圖上精準顯示,如道路的彎度、坡度等信息,此外,像是車道線位置、類型、寬度;交通信號燈、路邊地標及障礙物等元素,都可以在高精度地圖上詳細標注,可以實現車道級規劃,這些信息將讓自動駕駛汽車獲得更多的交通數據信息,讓行駛更加安全。
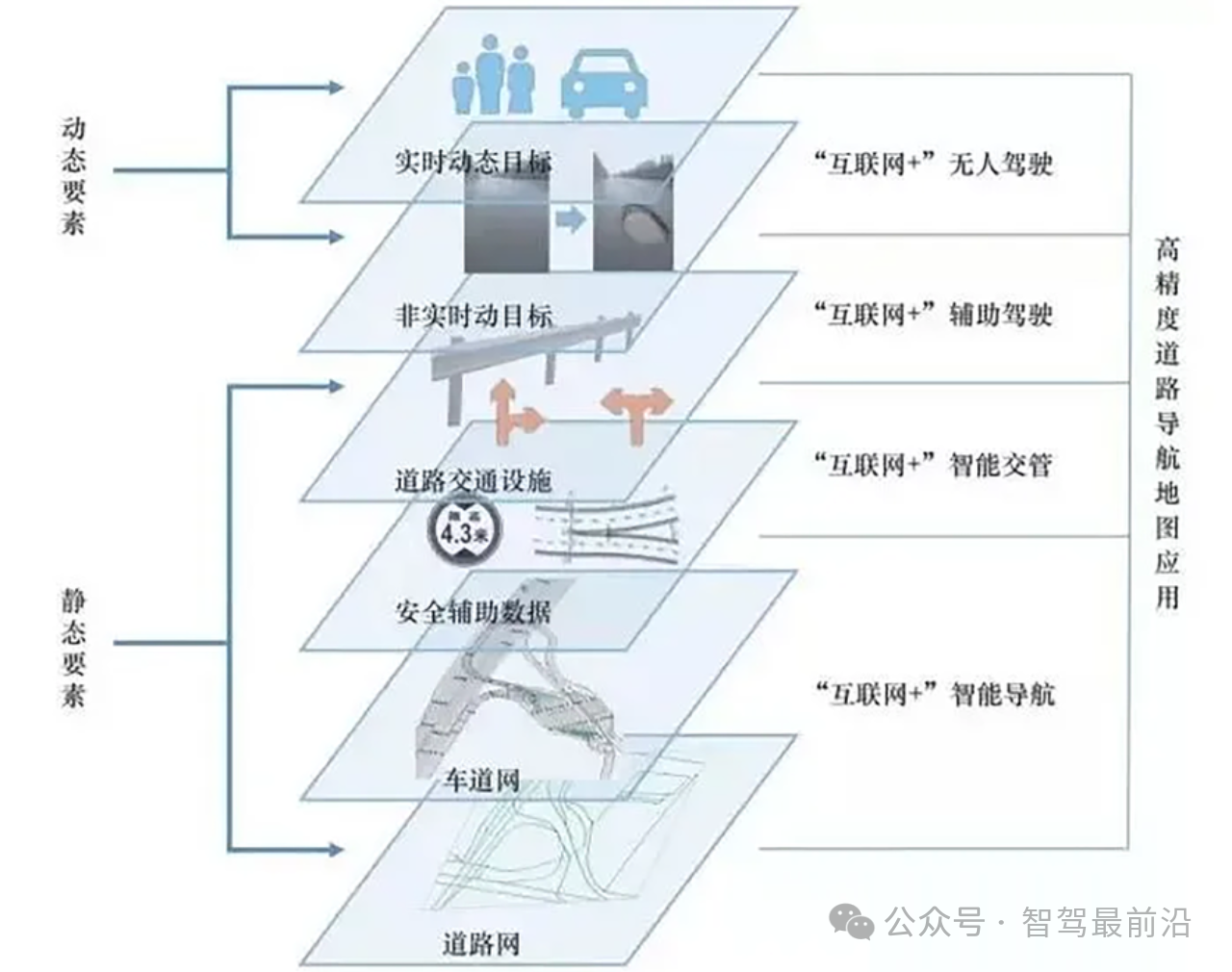
由于高精度地圖需要存儲和呈現車輛環境數據和交通運行數據,這些數據有動態的,也有靜態的,只是通過一張圖層難以實現這個效果,因此,需要將高精度地圖進行分層,每一層體現一種環境要素或者交通要素。歐洲將高精度地圖圖層分成來靜態、準靜態、準動態和動態4層,中國則提出了將高精度地圖分為道路層、交通信息層,道路-車道連接層、車道層、地圖特征層、動態感知層、決策支持層7層的分類方法。但根據識別信息的運動形式和種類,可以大致分為動態要素和靜態要素。動態要素包含實時動態目標和非實時動態目標,而靜態要素包含道路交通設施、安全輔助數據、車道網及道路網等信息。
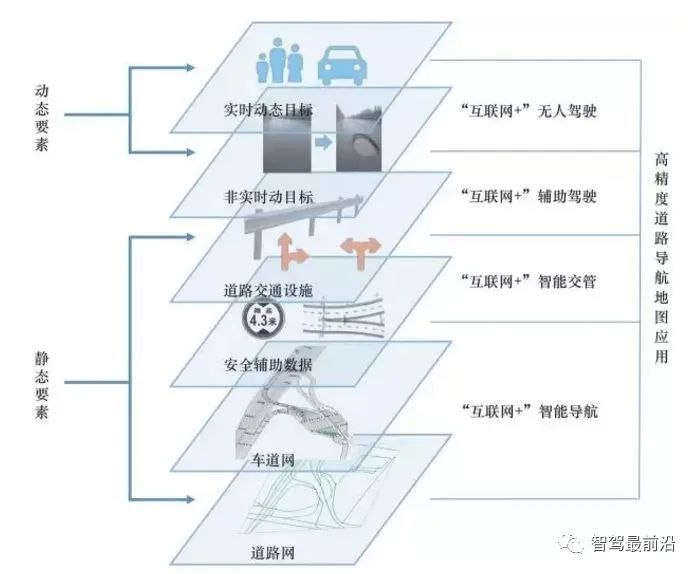
高精度地圖分層
高精度地圖的建立需要收集和處理大量的數據,以生成地圖數據,主要包括地圖數據采集、地圖數據處理和地圖數據應用三個部分。
地圖數據采集
地圖數據采集是高精度地圖技術的第一步。通常采用的方法包括激光雷達、車載攝像頭和高精度定位等多種傳感器的融合,將環境中的數據收集下來。在數據采集的過程中,需要保證數據的精度、全面性和實時性。因此,在采集數據時,需要考慮車輛的位置、傳感器的精度、環境因素以及數據質量等多個因素。采集到的數據通常包括車道線、路口、交通標志、交通信號燈、障礙物等環境信息。
地圖數據處理
地圖數據處理是將采集到的數據進行加工處理,并生成高精度地圖的過程。數據處理的過程中,需要進行數據清洗、特征提取、地圖構建和數據更新等多個步驟。其中,數據清洗是指去除噪聲和無效數據,以確保數據的準確性和一致性;特征提取是指從原始數據中提取特征信息,例如車道線、路口和交通標志等;地圖構建是將提取到的特征信息轉換為地圖數據,包括路網、車道線、交通標志和障礙物等;數據更新是指將新采集到的數據加入到地圖中,以保證地圖數據的實時性和全面性。生成的地圖數據還需要進行儲存,以供后續使用,常用的儲存方法包括云存儲和分布式存儲等,隨著時間的推移,高精度地圖的數據還需進行更新,以確保高精度地圖數據的準確性和實用性。
地圖數據應用
地圖數據應用是將高精度地圖應用于輔助自動駕駛汽車行駛的過程。在自動駕駛汽車行駛過程中,高精度地圖可以提供精確的位置和路線信息,幫助車輛進行導航和行駛決策。同時,地圖中的環境信息還可以幫助自動駕駛汽車識別和避讓障礙物、識別交通標志和信號燈等。
為什么要擺脫高精度地圖?
隨著越來越多智能汽車企業嘗試走向“重感知”的方向,高精度地圖在行業的認可度正面臨著走向邊緣化的階段。為什么要嘗試擺脫高精度地圖?1、數據采集和更新成本高:高精度地圖需要大量的數據采集和更新工作。這包括使用激光雷達、相機等傳感器對道路、交通標志、道路標線等進行精確的掃描和記錄。這些傳感器產生的數據需要經過處理和驗證,以生成準確的高精度地圖。然而,采集和處理這些數據的過程非常耗時且昂貴。此外,為了保持高精度地圖的最新性,還需要定期進行更新,這意味著持續的數據采集和處理成本。2、維護和更新復雜:道路網絡的動態性使得高精度地圖的維護和更新變得復雜。道路建設、交通標志更改、交通狀況的變化等都會對地圖數據產生影響。因此,高精度地圖需要及時的更新和維護,以確保其準確性和可靠性。這需要建立一個有效的反饋機制,收集來自駕駛者、城市規劃部門和其他數據源的信息,以及專業團隊對數據的驗證和更新。3、隱私和安全問題:高精度地圖涉及大量的位置數據和道路信息。保護用戶的隱私和地圖數據的安全是一個重要的考慮因素。地圖供應商和相關利益方需要確保數據的安全存儲、傳輸和處理,并制定合規性政策和措施,以保護用戶隱私和防止地圖數據的濫用。4、地理覆蓋范圍有限:構建高精度地圖需要大量的人力和物力資源。因此,在初期階段,高精度地圖主要覆蓋城市和主要道路網絡,而較偏遠地區和農村地區的地圖數據可能相對不完整。這是由于數據采集困難、覆蓋范圍較小以及資金和資源限制等因素導致的。這限制了自動駕駛車輛在廣泛地理區域內的應用和普及。5、標準和協議缺乏統一:自動駕駛車輛所需的高精度地圖需要與車輛的傳感器和控制系統進行有效的集成。然而,由于缺乏統一的標準和協議,不同高精度地圖供應商和車輛制造商之間的互操作性存在困難。這使得地圖數據的交換和使用變得復雜,導致了更高的成本和技術難度。缺乏統一的標準和協議會阻礙地圖數據的無縫集成和共享,限制了自動駕駛車輛的普及。
可以不需要高精度地圖嗎?
雖然越來越多智能汽車企業嘗試弱化高精度地圖在自動駕駛汽車中的參與度,但現實卻與想法完全相反,現階段想要讓自動駕駛汽車實現L3級別,沒有高精度地圖的參與是完全實現不了的。在“重感知”的理念中,自動駕駛汽車應當可以和人類駕駛員一樣,能自動識別交通環境信息,且可以對多變的交通環境做出快速反應,但現階段的技術,卻無法實現這些要求,由于感知硬件和自動駕駛軟件并不完善,在多數交通環境下,還是無法成為老司機,因此在自動駕駛未來很長時間的發展中,依舊無法完全擺脫高精度地圖。
審核編輯黃宇
-
自動駕駛
+關注
關注
785文章
13931瀏覽量
167008 -
高精度地圖
+關注
關注
1文章
18瀏覽量
3063
發布評論請先 登錄
相關推薦
LDC1000EVM能測多遠的金屬啊?
高精度焊接強度分析儀的應用與優勢探析
ads1278高速模式和高精度模式下所能得到的最高精度是多少?
請問ADS1263能做到多高精度?實現高精度應該注意什么?
物聯網系統中高精度RTK定位方案的實現_高精度定位模塊

VS高精度電壓傳感器
高精度電壓源的作用、特點及應用介紹
拋棄高精度地圖舊模式,走向視覺感知新時代?
什么是高精度定位平板?
S31系列小體積壓電偏轉鏡應用于高速、高精度光路偏轉調節!

北斗高精度定位終端的工作原理和精度范圍

北斗高精度定位終端適用于什么行業場景

什么是高精度電流源電路原理





 工商網監
工商網監
評論