 某水下機器人供電系統干擾改善方案淺析
某水下機器人供電系統干擾改善方案淺析
在工業級應用市場,未來很多高危、復雜、長時間或其他人力無法勝任的水下工作將逐步被水下機器人替代。水下機器人供電尺寸緊湊、輸出功率高、防水抗壓能力強和可靠性要求高等一系列特點決定其內部供電系統主要由高可靠性傳導冷卻的模塊電源提供。
在實際應用過程中,模塊電源需要匹配合理的外圍電路后才能正常工作。很多應用模塊電源的客戶因為缺乏足夠的使用經驗,常常在應用過程中遇到各種干擾問題,嚴重時將導致整體供電系統功能降級甚至故障。
如何才能確保機器人內部供電平臺搭建簡便且合理可靠呢?除了選擇大品牌的高可靠性模塊電源產品之外,項目初期能夠獲得良好的技術溝通服務更是產品供電長期穩定性的重要保障。
下面分享某水下機器人供電干擾改善案例,從外圍電路中關鍵的接地部分出發,簡單分析故障干擾成因,簡化干擾傳播路徑模型并提出相應的改善方案。
1. 問題描述:
某水下機器人客戶在原型機型式試驗中頻繁遇到重載干擾問題。具體故障現象為水下機器人重載運行時,容易出現電機扭矩不足故障,失去大部分動力儲備。
2. 原因分析:
實際測量機器人內部模塊電源輸出電壓后,當出現電機扭矩不足故障時,電源的輸出電壓已遠低于正常設定值,但此時實際輸出電流尚未達到滿載。初步懷疑為模塊電源內部過流保護功能受干擾后誤動作。
仔細檢查客戶模塊外圍電路布局后發現接地部分布局不當,特別是模塊周邊Y電容引腳端接地不良,額外引入的接地高頻阻抗導致外圍電路內高頻回路的Y電容實際效用下降。迫使部分正常工作時產生的高頻噪聲干擾流經模塊電
圖一為客戶原始模塊外圍電路PCB布局圖,輸入輸出端Y電容均通過細長的地線銅箔連接至紅圈處接地螺孔位置,然后通過固定螺絲與散熱器相連。
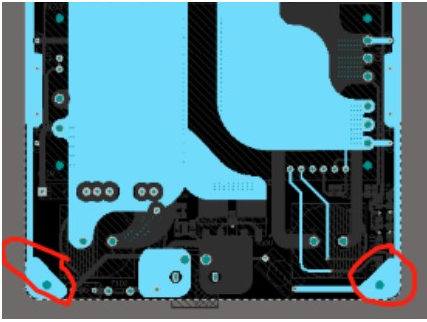
圖一
圖二為模塊電源外圍電路接地不良時,高頻干擾噪聲路徑的簡化模型
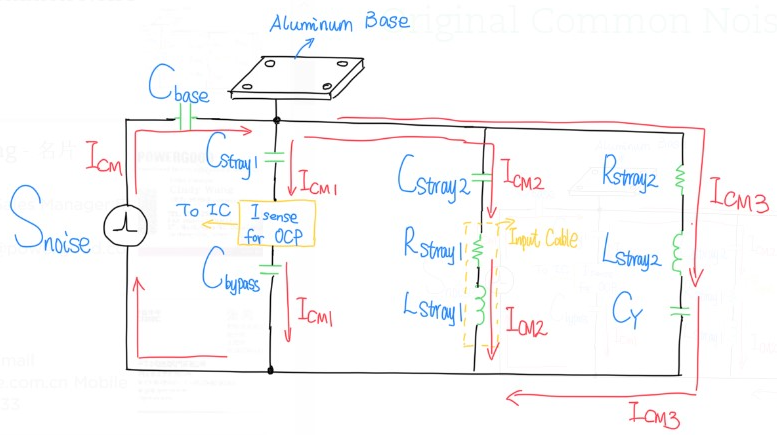
圖二
Snoise為模塊電源正常工作時,內部高速開關的功率元件等產生的共模噪聲源。Cbase為模塊內部功率元件與散熱鋁基板之間的耦合電容,正常工作時產生的高頻噪聲通過寄生電容Cbase注入到模塊背面的散熱鋁基板。因為共模噪聲本質上可等效為恒流源,所以注入到散熱鋁基板上的共模噪聲總要尋找合適的路徑返回其噪聲源。當外圍接地不佳時,將額外引入串聯等效高頻阻抗Rstray2和Lstray2,導致外加Y電容性能弱化。當PCB接地布局如圖一中顯示的細長型接地銅箔時,其可觀的等效串聯電感Lstray2在共模噪聲有效頻段內等效高頻阻抗高達幾十甚至上百歐姆。外圍接地阻抗的增加迫使部分共模噪聲通過其他耦合路徑分流后返回其噪聲源,同時也帶來諸多期望之外的干擾問題。
外圍電路接地不良時,部分共模噪聲Icm1將通過鋁基板與過流保護電路間耦合電容Cstray1注入。因為內部電流采樣信號線路阻抗不平衡,所以部分注入的共模噪聲將轉化為差模噪聲。模塊電源內部精確電流采樣信號容易被過量注入的高頻噪聲干擾,最終造成模塊電源過流保護功能誤動作,供電輸出電壓下降,導致電機輸出扭矩不足。
因為被原始設計用于耦合高頻噪聲的外圍Y電容接地不良,所以部分噪聲Icm2通過鋁基板與輸入線纜間高頻耦合后,從輸入側線纜返回其噪聲源。過長的高頻路徑和擴大數百倍的高頻環路面積大大增加了產品的EMI風險。
3. 解決對策:
如圖三所示改善模塊電源外圍電路中所有接地部分布局,在模塊電源固定螺絲孔位置就近布設接地銅箔。在模塊電源的輸入輸出端與鋁基板固定孔之間就近布置Y電容,確保接地銅箔盡量短且粗。
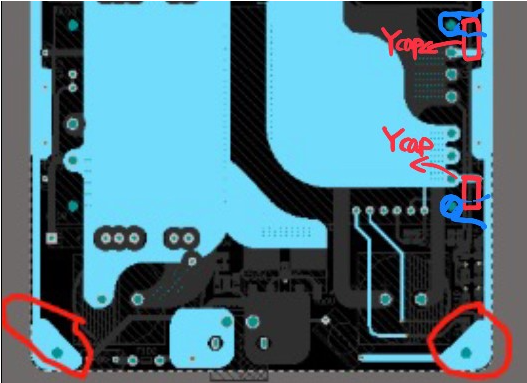
圖三
圖四為模塊電源外圍電路接地改善后的高頻干擾噪聲路徑簡化模型。降低外置Y電容回路的高頻阻抗后,因為外置Y電容Cy>>Cstray1+Cstray2,所以絕大部分高頻噪聲將被外置Y電容有效旁路,從而保證模塊電源內部信號電路的免受噪聲干擾。
合理的外圍電路布局和可靠接地處理同時也大大減少輸入線纜上高頻噪聲,降低產品的系統EMI風險,確保產品的長期性能穩定。
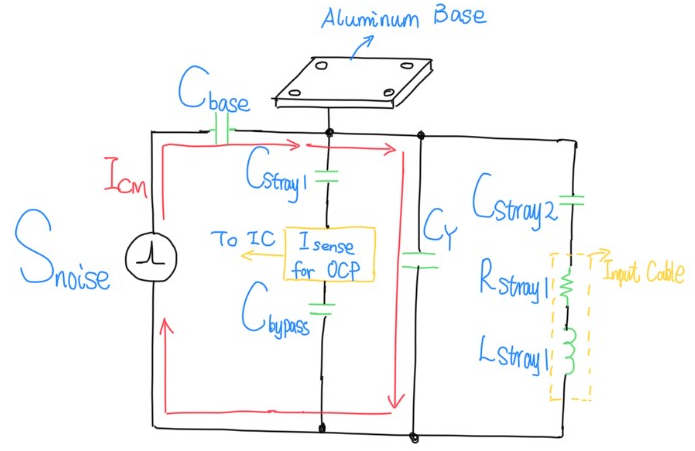
圖四
4. 小結與思考:
如今更快節奏的社會發展速度和對產品獨特競爭力的普遍要求對我們常規工作模式提出新的挑戰。除了選擇合理的模塊電源產品,充分且高效的前期技術溝通服務的重要性也上升到前所未有的高度。
審核編輯:郭婷
-
電源
+關注
關注
184文章
17836瀏覽量
251790 -
機器人
+關注
關注
211文章
28641瀏覽量
208405 -
emi
+關注
關注
53文章
3602瀏覽量
128193
發布評論請先 登錄
相關推薦
IT7600用于水下機器人供電系統測試
水下機器人便攜式遙控單元設計
【NanoPi NEO2試用申請】水下機器人探測項目
TDK-Lambda電源在系留無人機及水下機器人中的應用
如何設計水下機器人嵌入式控制系統?
【HarmonyOS HiSpark AI Camera】漁業衛士-基于圖像識別的多自由度水下機器人
水下機器人制作需要實現哪些功能呢
水下機器人研發挑戰海外市場
自由度下的水下機器人控制器抗干擾設計

基于PC104與C8051F120的水下機器人環境監測系統設計方案
一種水下機器人的水面平臺控制系統設計
這些水下機器人你見過嗎?一些水下機器人產品的介紹
新發明利用波浪能為水下機器人進行海底無線充電

水下機器人的設計與實現





 工商網監
工商網監
評論