 智能掃地機器人是如何準確清掃全屋的?
智能掃地機器人是如何準確清掃全屋的?
電子發燒友網報道(文/黃山明)如今的智能掃地機器人越來越智能,并且功能集成也越來越多,不僅集成了掃拖一體,并且還能進行自清潔,自動換水等功能。如果哪天能夠實現自動倒垃圾,那么掃地機器人在衛生打掃上,便能夠徹底解放人們的雙手。但每個房屋的布局都不一樣,智能掃地機器人是如何規劃路線進行清掃的,又是如何回到充電口自己充電的呢?
掃地機器人的自主導航與路徑規劃
如今掃地機器人能夠實現自主地避免障礙、在不同的地形上移動、清掃地板和返回基地,更加的智能與便利。而其中重要的一項技術便是路徑規劃,想要實現路徑規劃,就需要建立室內導航。
掃地機器人使用的導航技術通常包括兩種方法:基于邊界的導航和基于地標的導航,這兩種方法都有其特定的實現方式。
基于邊界的導航是通過讓機器人感知環境中的墻壁、墊角、家具等邊界來導航。現代掃地機器人通常使用多種傳感器,如激光雷達、紅外線或干涉儀來檢測墻壁等物體,并計算機器人相對于它們的位置和朝向。基于這些信息,機器人可以確定自己在房間中的位置,并移動到新的目的地。
而基于地標的導航,則需要讓機器人可以識別的獨特標記點來導航。例如,機器人可以通過識別房間中的門、家具、墻角等特定點來導航。這些標記可以使用計算機視覺或其他傳感器檢測。在基于地標的導航中,機器人利用描述這些標記點之間關系的建模來實現路徑規劃和導航。
想要實現上述兩種導航方式,則需要用到SLAM技術(即同步定位與地圖構建),其中機器人同時建立地圖并確定自己在地圖上的位置,然后將地圖用于路徑規劃和導航。機器人還可以使用視覺識別、語音識別和機器學習等先進技術來提高其導航精度和效率。
SLAM技術與A算法
SLAM技術(同步定位與地圖構建)是一種在未知環境中自主構建地圖,并同時確定機器人嵌入地圖中的位置的技術,因此也被描述為機器人自主定位和建圖。SLAM技術被廣泛應用于各種機器人應用中,包括自主車輛、航空器、無人機和掃地機器人等。
該技術主要通過機器人的傳感器來感知環境,同時使用這些感知數據來建立地圖和確定機器人在地圖中的位置。根據使用的傳感器類型,SLAM技術主要使用激光雷達、相機或RGB-D傳感器。通過這些傳感器獲取的數據,機器人可以檢測到環境中的障礙物、地板、墻壁和房間等物體,并提取出特征信息,例如邊緣和角點。
SLAM對于機器人的定位和建圖同時進行,就是機器人需要在建立地圖同時確定自己的位置這兩個問題上進行同步處理。因此,SLAM技術面臨的最大挑戰是處理感知數據的噪聲和錯誤,以及在構建地圖和定位機器人之間實現同步。為此,SLAM技術采用了許多算法和技術,包括濾波器技術、魯棒估計、特征提取、匹配和多假設跟蹤等。
在掃地機器人應用中,SLAM技術用于構建室內環境的地圖和確定機器人的位置,從而幫助機器人規劃清掃路線并避免障礙物。SLAM技術可以幫助機器人實現自主操作,從而大大提高了機器人的工作效率和準確度。
而想要更精準的行進,還需要輔以A算法,A算法是一種啟發式搜索算法,用于在地圖中找到從起點到終點的最短路徑。它通過評估每個節點到終點的距離,選擇最優的路徑來搜索最短路徑。A算法的優點是速度快、內存占用小,適用于解決一些離散化的問題。
在掃地機器人中,A算法可以用于規劃機器人的路徑,以便更好地完成清潔任務。具體來說,A算法會根據當前機器人的位置和目標位置之間的距離,計算出一條從當前位置到目標位置的最優路徑,并沿著這條路徑前進。這樣就可以實現機器人的自主導航和路徑規劃。
小結
如今的智能掃地機器人利用SLAM技術來自主建立室內環境的地圖,并確定自身在地圖中的位置;同時,使用A算法基于啟發式函數估計鄰居節點到目標的距離成本,并計算每個鄰居節點的總路徑成本,以規劃出最優的清掃路徑,保證往返路徑的最小化和時間的最大化,同時避免障礙物和不必要的繞路,從而高效、優化地完成清掃任務。
掃地機器人的自主導航與路徑規劃
如今掃地機器人能夠實現自主地避免障礙、在不同的地形上移動、清掃地板和返回基地,更加的智能與便利。而其中重要的一項技術便是路徑規劃,想要實現路徑規劃,就需要建立室內導航。
掃地機器人使用的導航技術通常包括兩種方法:基于邊界的導航和基于地標的導航,這兩種方法都有其特定的實現方式。
基于邊界的導航是通過讓機器人感知環境中的墻壁、墊角、家具等邊界來導航。現代掃地機器人通常使用多種傳感器,如激光雷達、紅外線或干涉儀來檢測墻壁等物體,并計算機器人相對于它們的位置和朝向。基于這些信息,機器人可以確定自己在房間中的位置,并移動到新的目的地。
而基于地標的導航,則需要讓機器人可以識別的獨特標記點來導航。例如,機器人可以通過識別房間中的門、家具、墻角等特定點來導航。這些標記可以使用計算機視覺或其他傳感器檢測。在基于地標的導航中,機器人利用描述這些標記點之間關系的建模來實現路徑規劃和導航。
想要實現上述兩種導航方式,則需要用到SLAM技術(即同步定位與地圖構建),其中機器人同時建立地圖并確定自己在地圖上的位置,然后將地圖用于路徑規劃和導航。機器人還可以使用視覺識別、語音識別和機器學習等先進技術來提高其導航精度和效率。
SLAM技術與A算法
SLAM技術(同步定位與地圖構建)是一種在未知環境中自主構建地圖,并同時確定機器人嵌入地圖中的位置的技術,因此也被描述為機器人自主定位和建圖。SLAM技術被廣泛應用于各種機器人應用中,包括自主車輛、航空器、無人機和掃地機器人等。
該技術主要通過機器人的傳感器來感知環境,同時使用這些感知數據來建立地圖和確定機器人在地圖中的位置。根據使用的傳感器類型,SLAM技術主要使用激光雷達、相機或RGB-D傳感器。通過這些傳感器獲取的數據,機器人可以檢測到環境中的障礙物、地板、墻壁和房間等物體,并提取出特征信息,例如邊緣和角點。
SLAM對于機器人的定位和建圖同時進行,就是機器人需要在建立地圖同時確定自己的位置這兩個問題上進行同步處理。因此,SLAM技術面臨的最大挑戰是處理感知數據的噪聲和錯誤,以及在構建地圖和定位機器人之間實現同步。為此,SLAM技術采用了許多算法和技術,包括濾波器技術、魯棒估計、特征提取、匹配和多假設跟蹤等。
在掃地機器人應用中,SLAM技術用于構建室內環境的地圖和確定機器人的位置,從而幫助機器人規劃清掃路線并避免障礙物。SLAM技術可以幫助機器人實現自主操作,從而大大提高了機器人的工作效率和準確度。
而想要更精準的行進,還需要輔以A算法,A算法是一種啟發式搜索算法,用于在地圖中找到從起點到終點的最短路徑。它通過評估每個節點到終點的距離,選擇最優的路徑來搜索最短路徑。A算法的優點是速度快、內存占用小,適用于解決一些離散化的問題。
在掃地機器人中,A算法可以用于規劃機器人的路徑,以便更好地完成清潔任務。具體來說,A算法會根據當前機器人的位置和目標位置之間的距離,計算出一條從當前位置到目標位置的最優路徑,并沿著這條路徑前進。這樣就可以實現機器人的自主導航和路徑規劃。
小結
如今的智能掃地機器人利用SLAM技術來自主建立室內環境的地圖,并確定自身在地圖中的位置;同時,使用A算法基于啟發式函數估計鄰居節點到目標的距離成本,并計算每個鄰居節點的總路徑成本,以規劃出最優的清掃路徑,保證往返路徑的最小化和時間的最大化,同時避免障礙物和不必要的繞路,從而高效、優化地完成清掃任務。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
SLAM
+關注
關注
23文章
426瀏覽量
31928 -
掃地機器人
+關注
關注
21文章
792瀏覽量
53639
發布評論請先 登錄
相關推薦
智能掃地機器人的工作原理和構成
隨著“懶人經濟”快速發展,現在很多年輕人家中配置了智能掃地機器人產品,它通常具有清掃、吸塵、擦地、智能提醒等功能,通過滾刷高速旋轉形成真空,利用高速氣流將垃圾吸入,然后收集在布袋中,經
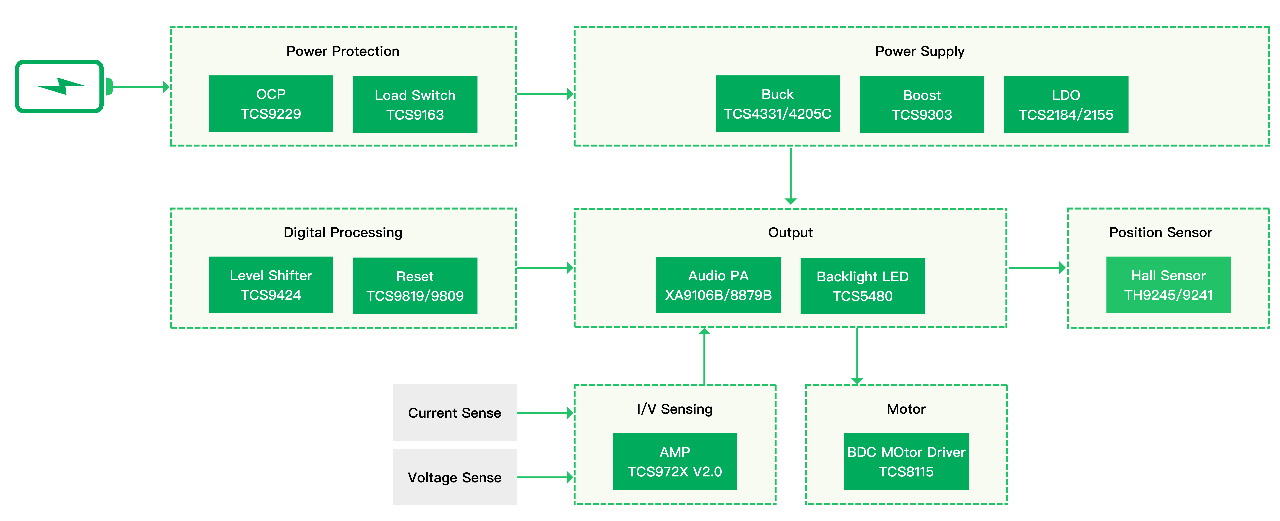
掃地機器人應用解決方案
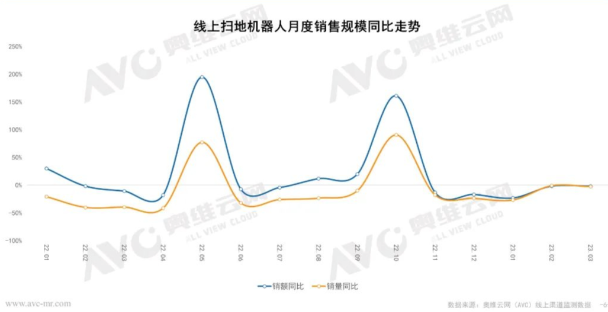
掃地機器人,作為智能家居設備的新興代表,近年來廣泛受到年輕人的青睞和重視,已經逐漸成為家庭及辦公環境中的必需品。隨著各地落實新一輪消費品以舊換新政策,家電市場的換新需求被激活,根據奧維云數據顯示
霍爾開關在掃地機器人中的應用
隨著社會的發展和生活水平的提高,掃地機器人因為操作簡單,使用方便越來越多地走進了人們生活,和家庭,辦公聯系在了一起,成為了小家電中重要的一員,霍爾開關在掃地機器人中也有著諸多應用。 1.開關控制
破解大面積場景清潔難題,普渡推出AI智能掃地機器人PUDU MT1
景的AI智能掃地機器人,適用于倉儲物流、工業車間、交通樞紐、大型商場等大面積場景,能夠有效處理面積超過10萬平方米的清潔區域。MT1性能卓越,無所不掃,其清掃效果媲美駕駛式清掃設備,致
掃地機器人的核心技術突破
在當今科技飛速發展的時代,智能家居產品如雨后春筍般涌現,其中掃地機器人以其便捷、高效的清潔能力,逐漸成為現代家庭的得力助手。而在掃地機器人眾多的技術構成中,HXA2610 有刷馬達驅動 IC 無疑是
掃地機器人避障技術的發展史
掃地機器人從真空吸塵器發展而來,它的出現幫助人們解放雙手、減輕家務負擔,可以更多關注生活中重要的事情,因此越來越多的家庭選擇配置掃地機器人。
湯誠科技推出掃地機器人、洗地機應用方案,?為品質生活添彩
在“懶人經濟”盛行的當下,智能家電產品已經滲透到人們生活的各個場景中,掃地機器人、洗地機作為其中的代表性產品,近年來發展迅速。 從2016年國內市場爆發式增長,到如今成為家庭清潔必不可少的一部分
供應 英集芯IP2348,適用于掃地機器人解決方案的鋰電池同步降壓充電芯片
在至為芯科技設計的掃地機器人電源管理解決方案中,主板芯片選用的是來自英集芯的IP2348。這款鋰電池充電芯片以其卓越的QFN28封裝技術,為掃地機器人提供了強大的能量支持。它支持高達36V的輸入輸出
發表于 07-24 14:47
光耦知識分享‖探討光耦技術在掃地機器人的應用
在智能科技的飛速發展中,掃地機器人已成為現代生活中不可或缺的助手。而光耦(Optocoupler)作為一項先進的電子元件,正在為掃地機器人的高級功能提供支持。

愛普生新款陀螺儀傳感器GGPM01LK于掃地機器人的應用
在電子技術的不斷發展下,人們對于機器人的要求越來越高,導致企業對機器人的設計和性能要求也變得嚴格起來。就掃地機器人而言,對于其姿態控制和運動穩定性的要求非常嚴格。針對如今嚴格的要求,愛普生推出了一款令人稱道的陀螺儀傳感器這款新產

其利天下技術·搭載無刷電機的掃地機器人的前景如何?
隨著懶人經濟的崛起,智能家居設備的需求呈現出顯著的增長態勢。作為智能家居領域的一員,掃地機器人因其方便、實用的特性而備受消費者青睞。特別是在無刷電機技術的加持下,掃地機器人不僅提升了清
發表于 05-05 15:03
鴻蒙南向開發實戰:【智能掃地機】
此Demo采用潤和的智能小車套件為硬件模型,通過修改代碼具備了掃地機器人簡易的避障功能及防跌落功能,并且能通過wifi接入數字管家應用場景。智能掃地機不僅能接收數字管家應用下發的指令啟
掃地機器人CCC認證申請流程與其他產品的區別是什么?
智能家居的興起給人們的日常生活帶來了很多便利。而其中一眾產品當中,在近幾年技術性得到重大突破并且廣泛運用于人們居家生活的當屬掃地機器人了。掃地機器人CCC認證申請流程與其他產品的區別體現了其在安全性






 工商網監
工商網監
評論