 「智科特案例」移動機器人如何耕好田
「智科特案例」移動機器人如何耕好田
我們做了個大型移動機器人在田里翻滾的項目。
甲方給我們提的需求是:
“我們想要一個移動機器人代替人工在復雜的農田環境巡視:采集農田、果園中的圖像并進行收集,通用性要比較好,形成一個終端圖像信息采集系統,用于后端圖像分析。最好還能實現建圖、導航、自主避障。如果可以的話,最好能固定四個點然后在田里跑個弓字形,實現田地全覆蓋。”
根據甲方需求,我們做了這么一套系統模塊:
功能上我們做了室外建圖定位導航、遠程控制和數據采集,重點還是弓字型循跡。弓字型在很多農業應用中都能用得上,也可以適配各種移動平臺,這套軟件功能我們高度集成化構建,為日后我們爆改別的農機打下了堅實的基礎。
循跡我們用的包是Gerona,這個包,包括給定地圖上的路徑規劃、控制機器人沿著該路徑行駛以及行駛時的避障。是一個模塊化的、易于擴展的框架。
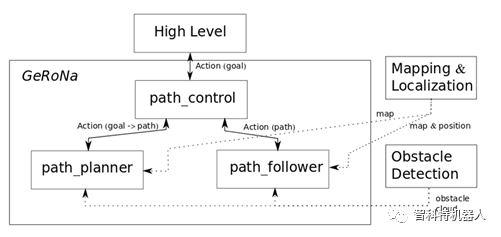
圖 Gerona框架
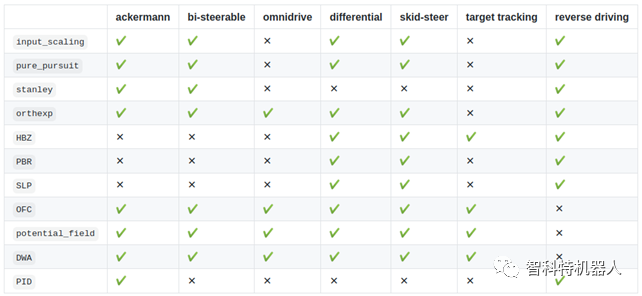
圖不同結構機器人類型與能夠使用的循跡控制算法
具體效果可以看我們文末的測試視頻。
傳感器搭載了三維激光雷達、深度攝像頭、雙目攝像頭和PTZ攝像頭,以及外配的一個IMU和差分GPS,我們作為國內唯二Clearpath的代理商,拿著Warthog一頓爆改。

硬件部分,主體是基于Clearpath Warthog搭建, Warthog是Clearpath系列里面最大的型號,還是一款水陸兩棲的移動機器人(對沒錯,它能在水里游)。

花絮
農業智能化在國內大有可為,我們也做了一些技術儲備,今年晚些時候會發布一些好玩的功能特性,也請大家多多支持。

小伙伴在田里測試(被南京的蚊子咬)

小伙伴在路上測試(被南京的蚊子咬)

小伙伴在廠里測試(被南京的蚊子咬)
北京智科特機器人是一家專業研發、集成、銷售高性能、高穩定性的機器人專業技術公司。我們的愿景是成為國內一流研究型機器人本體科研解決方案服務提供商與機器人在垂直細分領域的落地者和傳播者。通過滿足廣大用戶的多樣性需求,基于用戶的多樣性反饋中研發與迭代產品,讓機器人技術造福更多領域。
-
機器人
+關注
關注
211文章
28646瀏覽量
208439
發布評論請先 登錄
相關推薦
移動機器人核心科技解碼:導航、感知與掌控力的深度剖析
宜科電子榮獲雙年度移動機器人行業優質供應鏈獎
思嵐科技榮獲雙年度移動機器人優質供應鏈獎
移動機器人的技術突破和未來展望

智能移動機器人系統方案指南

新松移動機器人批量進軍歐洲新能源市場
智能移動機器人

如何借助恩智浦MCX系列MCU糾錯功能,打造可靠安全的移動機器人?

智能移動機器人系統的用途和市場趨勢
移動機器人四大賦能技術及NXP解決方案,本文總結全了!
海康機器人第100000臺移動機器人下線
機械臂和移動機器人兩種控制系統方案對比

自主移動機器人(AMR)功能和特點

移動機器人幕后的全能冠軍——MRC5000






 工商網監
工商網監
評論