") 大話中國(guó)C-V2X通訊標(biāo)準(zhǔn)應(yīng)用層標(biāo)準(zhǔn)
大話中國(guó)C-V2X通訊標(biāo)準(zhǔn)應(yīng)用層標(biāo)準(zhǔn)
一、前言
2017年9月18日,中國(guó)智能網(wǎng)聯(lián)汽車(chē)產(chǎn)業(yè)創(chuàng)新聯(lián)盟攜手重慶長(zhǎng)安汽車(chē)、通用汽車(chē)、清華大學(xué)等單位發(fā)布了我國(guó)第一部V2X應(yīng)用層團(tuán)體標(biāo)準(zhǔn):《合作式智能運(yùn)輸系統(tǒng)?車(chē)用通信系統(tǒng)應(yīng)用層及應(yīng)用數(shù)據(jù)交互標(biāo)準(zhǔn) T/CSAE?53-2017》,該標(biāo)準(zhǔn)的發(fā)布填補(bǔ)了我國(guó)V2X應(yīng)用層標(biāo)準(zhǔn)的空白。
2020年12月31日,中國(guó)智能網(wǎng)聯(lián)汽車(chē)產(chǎn)業(yè)創(chuàng)新聯(lián)盟聯(lián)合星云互聯(lián)、重慶長(zhǎng)安汽車(chē)、通用汽車(chē)等單位對(duì)2017年的標(biāo)準(zhǔn)進(jìn)行了完善,推出《合作式智能運(yùn)輸系統(tǒng)車(chē)用通信系統(tǒng)應(yīng)用層及應(yīng)用數(shù)據(jù)交互標(biāo)準(zhǔn)(第一階段)T/CSAE 53-2020》(以下簡(jiǎn)稱(chēng)DAY1)標(biāo)準(zhǔn)代替了T/CSAE 53-2017標(biāo)準(zhǔn)。與此同時(shí),中國(guó)智能網(wǎng)聯(lián)汽車(chē)產(chǎn)業(yè)創(chuàng)新聯(lián)盟也聯(lián)同星云互聯(lián)科技、電信科學(xué)技術(shù)研究院、華為技術(shù)有限公司等單位推出了V2X第二階段標(biāo)準(zhǔn):《合作式智能運(yùn)輸系統(tǒng)車(chē)用通信系統(tǒng)應(yīng)用層及應(yīng)用數(shù)據(jù)交互標(biāo)準(zhǔn)(第二階段)》(以下簡(jiǎn)稱(chēng)DAY2標(biāo)準(zhǔn)),在第一階段標(biāo)準(zhǔn)基礎(chǔ)之上豐富了應(yīng)用層場(chǎng)景。
北匯信息作為蜂窩車(chē)聯(lián)(C-V2X)工作組成員,2019年進(jìn)入C-V2X市場(chǎng)后,深耕C-V2X測(cè)試領(lǐng)域,已為數(shù)十家企業(yè)交付了成套的C-V2X測(cè)試臺(tái)架及測(cè)試服務(wù),包括國(guó)內(nèi)多家汽車(chē)整車(chē)廠、零部件企業(yè)以及檢測(cè)機(jī)構(gòu)。
1.1在DAY1標(biāo)準(zhǔn)中對(duì)合作式智能運(yùn)輸系統(tǒng)車(chē)用通信系統(tǒng)進(jìn)行了描述
合作式智能運(yùn)輸系統(tǒng)車(chē)用通信系統(tǒng),旨在通過(guò)智能運(yùn)輸系統(tǒng)各子系統(tǒng)之間的信息交互,實(shí)現(xiàn)道路安全、通行效率、信息服務(wù)等各類(lèi)應(yīng)用。為此,不同廠商車(chē)輛之間,以及這些車(chē)輛與其所能到達(dá)的區(qū)域范圍內(nèi)的道路基礎(chǔ)設(shè)施之間,必須實(shí)現(xiàn)互聯(lián)互通。
以車(chē)用通訊系統(tǒng)中的車(chē)載單元(OBUOn-Board Unit)為例,車(chē)載設(shè)備通常包括了如下圖所示的子系統(tǒng):
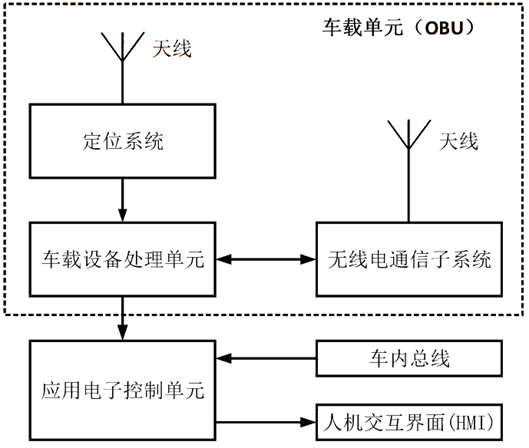
圖1合作式智能運(yùn)輸系統(tǒng)車(chē)用通信系統(tǒng)車(chē)載設(shè)備構(gòu)成示意圖
- 無(wú)線電通信子系統(tǒng):接收和發(fā)送空中信號(hào)。一個(gè)車(chē)載設(shè)備里可以裝配一個(gè)或者多個(gè)無(wú)線電通信子系統(tǒng);
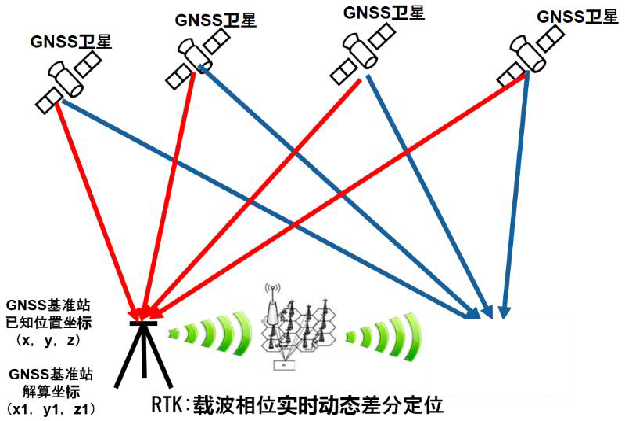
- 定位系統(tǒng):該子系統(tǒng)通常包含全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS, Global Navigation Satellite System)接收器,用以提供車(chē)輛的位置、方向、速度和時(shí)間等信息。該子系統(tǒng)可以通過(guò)車(chē)速信號(hào)、慣性測(cè)量單元、差分定位系統(tǒng)等技術(shù)來(lái)實(shí)現(xiàn)增強(qiáng)定位;
- 車(chē)載設(shè)備處理單元:運(yùn)行程序以生成需要發(fā)送的空中信號(hào),以及處理接收的空中信號(hào);
- 天線:實(shí)現(xiàn)射頻信號(hào)的接收和發(fā)送。
車(chē)載設(shè)備通過(guò)接口與應(yīng)用電子控制單元相連,在應(yīng)用電子控制單元中運(yùn)行程序?qū)崿F(xiàn)車(chē)用通信系統(tǒng)的應(yīng)用,并通過(guò)人機(jī)交互界面(HMI, Human Machine Interface)來(lái)實(shí)現(xiàn)對(duì)駕駛員的提醒,包括圖像、聲音、振動(dòng)等方式。
1.2標(biāo)準(zhǔn)對(duì)應(yīng)用范圍進(jìn)行了圈定
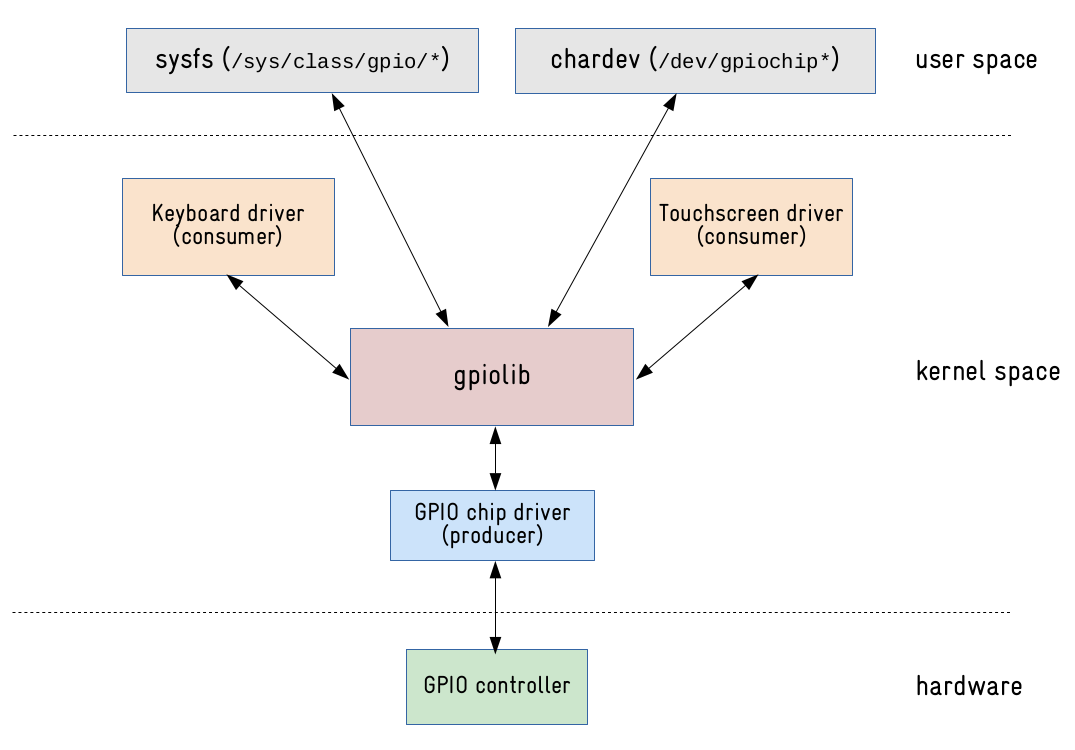
基于國(guó)際標(biāo)準(zhǔn)化組織(ISO)指定的通訊系統(tǒng)七層參考模型,及歐美正在制定的車(chē)用通訊系統(tǒng)構(gòu)架,車(chē)用通信系統(tǒng)通常可以分為系統(tǒng)應(yīng)用、應(yīng)用層、傳輸層、網(wǎng)絡(luò)層、數(shù)據(jù)鏈路層和物理層。DAY1標(biāo)準(zhǔn)著重關(guān)注了應(yīng)用層及應(yīng)用層與上下相鄰兩層的數(shù)據(jù)交互接口,如圖2所示。應(yīng)用層協(xié)議主要包括消息集和消息集內(nèi)的數(shù)據(jù)幀與數(shù)據(jù)元素,以及消息的數(shù)據(jù)結(jié)構(gòu)和編碼方式。DAY1標(biāo)準(zhǔn)通過(guò)對(duì)道路安全、通行效率和信息服務(wù)等基礎(chǔ)應(yīng)用的分析,定義在實(shí)現(xiàn)各種應(yīng)用時(shí),本車(chē)與其他車(chē)輛、道路交通設(shè)施及其他交通參與者之間的信息交互內(nèi)容、交互協(xié)議與接口等。
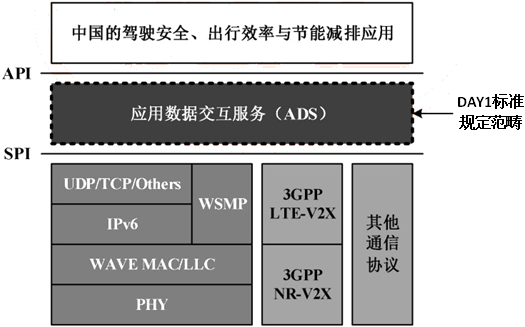
圖2標(biāo)準(zhǔn)范圍示意圖
二、車(chē)用通信系統(tǒng)基礎(chǔ)應(yīng)用
2.1 DAY1應(yīng)用場(chǎng)景
DAY1標(biāo)準(zhǔn)選擇了安全、效率、信息服務(wù)三個(gè)方面覆蓋了17個(gè)應(yīng)用場(chǎng)景,包括前向碰撞預(yù)警、交叉路口碰撞預(yù)警、異常車(chē)輛提醒、綠波車(chē)速引導(dǎo)、前方擁堵提醒、汽車(chē)近場(chǎng)支付等。如表1:
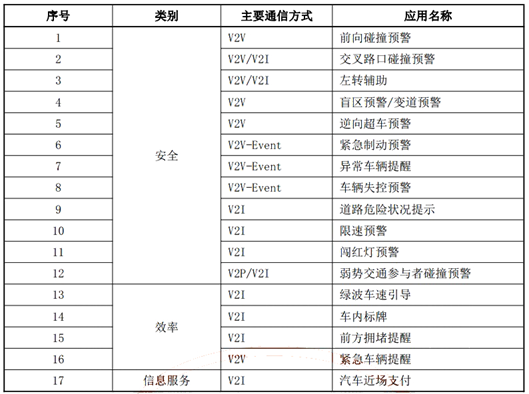
表1 DAY1應(yīng)用列表
DAY1標(biāo)準(zhǔn)在應(yīng)用定義、主要場(chǎng)景、系統(tǒng)基本原理、通信方式、基本性能要求和數(shù)據(jù)交互需求6個(gè)方面對(duì)17個(gè)場(chǎng)景進(jìn)行定義的同時(shí),也根據(jù)應(yīng)用對(duì)通信頻率和時(shí)延的不同需求將17個(gè)一期應(yīng)用分為了兩大類(lèi):
- 一是高時(shí)延(>100 ms)、低頻率(<10 Hz)的應(yīng)用,可通過(guò)4G蜂窩通信技術(shù)實(shí)現(xiàn);
- 二是低時(shí)延(≤100 ms)、高頻率(≥10 Hz)的應(yīng)用,需要LTE-V2X、DSRC或5G通信技術(shù)的支持才能實(shí)現(xiàn)。
通過(guò)對(duì)比DAY1階段的CSAE53-2017和CSAE53-2020兩個(gè)版本需求,我們不難發(fā)現(xiàn),相較于CSAE53-2017標(biāo)準(zhǔn),CSAE53-2020對(duì)定位精度提出了更高要求,如表2所示:
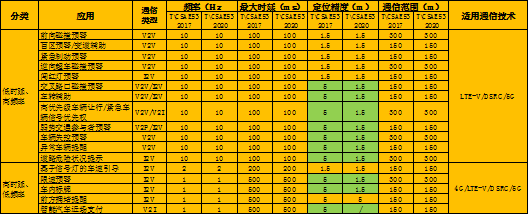
表2一期應(yīng)用按通訊需求分類(lèi)表
除前方擁堵提醒定位精度保持5m、智能汽車(chē)近場(chǎng)支付定位精度取消外,其余應(yīng)用都將定位精度由5m提升到了1.5m,這對(duì)GNSS定位精度提出了更高的要求。
2.2 DAY2應(yīng)用場(chǎng)景
DAY2標(biāo)準(zhǔn)基于DAY1標(biāo)準(zhǔn),選擇面向安全、效率、信息服務(wù)、交通管理、高級(jí)智能駕駛等領(lǐng)域,定義了12個(gè)典型應(yīng)用,其中包括感知數(shù)據(jù)共享、協(xié)作式變道、協(xié)作式車(chē)輛匯入等應(yīng)用,如表3:

表3 DAY2應(yīng)用列表
DAY2標(biāo)準(zhǔn)也在應(yīng)用定義、預(yù)期效果、主要場(chǎng)景、系統(tǒng)基本原理、通信方式、基本性能要求和數(shù)據(jù)交互需求7個(gè)方面,對(duì)12個(gè)第二階段應(yīng)用場(chǎng)景分別進(jìn)行描述。
對(duì)比DAY1和DAY2標(biāo)準(zhǔn),我們不難發(fā)現(xiàn),DAY1標(biāo)準(zhǔn)的應(yīng)用場(chǎng)景更多關(guān)注的是單車(chē)在車(chē)路協(xié)同環(huán)境下的預(yù)警功能實(shí)現(xiàn),而在DAY2階段,更多的場(chǎng)景則聚焦到了車(chē)路協(xié)作、交通控制管理等方面。筆者從場(chǎng)景分類(lèi)維度對(duì)DAY1和DAY2中的場(chǎng)景進(jìn)行了區(qū)分,如表4:

表4中國(guó)標(biāo)準(zhǔn)V2X通訊應(yīng)用場(chǎng)景
由表4我們可以看到,DAY2標(biāo)準(zhǔn)中,對(duì)盲區(qū)預(yù)警/變道預(yù)警、弱勢(shì)交通參與者碰撞預(yù)警、緊急車(chē)輛提醒三個(gè)場(chǎng)景進(jìn)行了更為深入的研討。在對(duì)應(yīng)的安全分類(lèi)中加入了感知數(shù)據(jù)共享、協(xié)作式車(chē)輛匯入、協(xié)作式交叉口通行應(yīng)用場(chǎng)景,在效率分類(lèi)中新加入了道路收費(fèi)服務(wù)、動(dòng)態(tài)車(chē)道管理、協(xié)作式車(chē)輛匯入及協(xié)作式交叉口同行場(chǎng)景,在信息服務(wù)分類(lèi)中加入了差分?jǐn)?shù)據(jù)服務(wù)、場(chǎng)站路徑引導(dǎo)服務(wù)、道路收費(fèi)服務(wù)應(yīng)用場(chǎng)景。同時(shí)也新增加了交通管理及高級(jí)智能駕駛兩個(gè)分類(lèi),在交通管理分類(lèi)中新增了動(dòng)態(tài)車(chē)道管理及浮動(dòng)車(chē)數(shù)據(jù)采集應(yīng)用場(chǎng)景,在高級(jí)智能駕駛分類(lèi)新增了協(xié)作式車(chē)輛編隊(duì)管理應(yīng)用場(chǎng)景。
值得關(guān)注的是,DAY2標(biāo)準(zhǔn)更聚焦于“協(xié)作”上,DAY2標(biāo)準(zhǔn)中對(duì)于車(chē)輛的命名由DAY1標(biāo)準(zhǔn)中的HV(Host Vehicle)和RV(Remote Vehicle)變?yōu)榱薊V1(Equipped Vehicle 1),EV-2(Equipped Vehicle 2),這也意味著標(biāo)準(zhǔn)由DAY1階段的關(guān)注自車(chē)“權(quán)益”轉(zhuǎn)向了DAY2階段的關(guān)注交通參與者的“權(quán)益”,也佐證了筆者DAY2標(biāo)準(zhǔn)更聚焦于“協(xié)作”的觀點(diǎn)。
本文以DAY1中的盲區(qū)預(yù)警/變道預(yù)警場(chǎng)景和DAY2中的協(xié)作式變道場(chǎng)景為例說(shuō)明。
盲區(qū)預(yù)警/變道預(yù)警和協(xié)作式變道兩個(gè)場(chǎng)景共同關(guān)注點(diǎn)及預(yù)期效果都在于兩輛車(chē)之間如何安全的進(jìn)行變道,以消除駕駛盲區(qū)所帶來(lái)的駕駛風(fēng)險(xiǎn)。圖3、4、5分別是DAY1的變道預(yù)警場(chǎng)景和DAY2的協(xié)作式變道場(chǎng)景,展示了一輛車(chē)(盲區(qū)預(yù)警/變道預(yù)警場(chǎng)景中為HV,協(xié)作式變道場(chǎng)景中為EV-1)在行駛過(guò)程中意圖變道,另一輛車(chē)(盲區(qū)預(yù)警/變道預(yù)警場(chǎng)景中為RV,協(xié)作式變道場(chǎng)景中為EV-2)在該過(guò)程中存在安全風(fēng)險(xiǎn),以期避免風(fēng)險(xiǎn)產(chǎn)生的過(guò)程。不同的是盲區(qū)預(yù)警/變道預(yù)警場(chǎng)景的預(yù)期目的是HV駕駛員收到預(yù)警后,能有足夠時(shí)間采取措施,避免與相鄰車(chē)道上的 RV發(fā)生碰撞。而協(xié)作式變道場(chǎng)景的預(yù)期目的則是相關(guān)車(chē)輛(EV-2)接收到 EV-1變道意圖信息,結(jié)合自身行駛狀態(tài)與周?chē)h(huán)境信息做出判斷,采取減速讓道或加速通過(guò)駕駛行為。
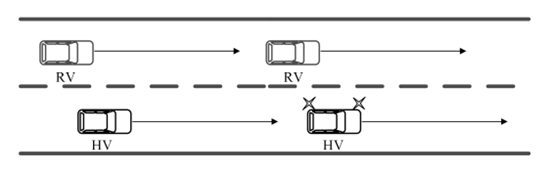
圖3 DAY1盲區(qū)預(yù)警/變道預(yù)警場(chǎng)景

圖4 DAY2協(xié)作式變道場(chǎng)景EV-2加速通過(guò)

圖5 DAY2協(xié)作式變道場(chǎng)景EV-2減速讓行
在盲區(qū)預(yù)警/變道預(yù)警場(chǎng)景中關(guān)注的是HV的行駛安全及狀態(tài),而在協(xié)作式變道場(chǎng)景更多關(guān)注的是協(xié)作車(chē)輛之間的協(xié)作行為。
三、應(yīng)用層交互數(shù)據(jù)集
CSAE應(yīng)用層標(biāo)準(zhǔn)遵循“消息集-數(shù)據(jù)幀-數(shù)據(jù)元素”三層嵌套結(jié)構(gòu)規(guī)則對(duì)應(yīng)用層數(shù)據(jù)集進(jìn)行制定;采用了ASN.1抽象語(yǔ)法進(jìn)行定義,實(shí)現(xiàn)了跨平臺(tái)和不同編程語(yǔ)言的兼容;考慮到射頻性能,數(shù)據(jù)集交互的編解碼方式遵循非對(duì)齊壓縮編碼規(guī)則UPER(Unaligned Packet Encoding Rules),有效壓縮空口通信數(shù)據(jù)包的大小。
在DAY1標(biāo)準(zhǔn)中定義了基礎(chǔ)的BSM、SPAT、RSI、MAP、RSM五大類(lèi)消息,如圖6。DAY2在DAY1基礎(chǔ)上對(duì)MAP、RSI消息進(jìn)行了拓展之外,也新提出了PAM、PSM、RSC等新的消息體,如圖7。
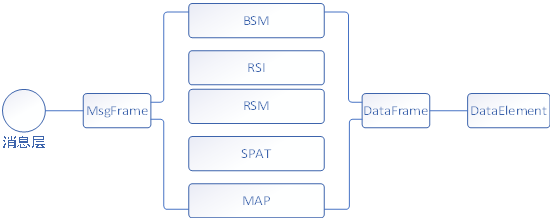
圖6 DAY1中的應(yīng)用層交互數(shù)據(jù)集
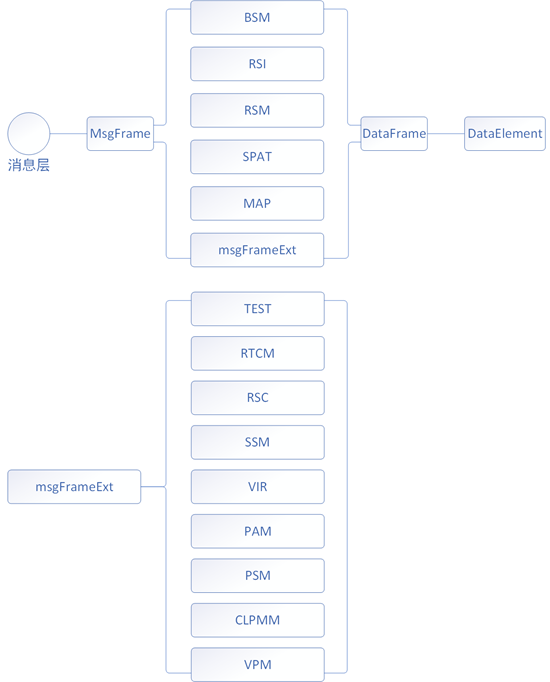
圖7 DAY2中的應(yīng)用層交互數(shù)據(jù)集
四、總結(jié)
DAY1標(biāo)準(zhǔn)、DAY2標(biāo)準(zhǔn)的推出對(duì)中國(guó)V2X通信標(biāo)準(zhǔn)的建立和深化有著重要意義,對(duì)車(chē)用通信系統(tǒng)應(yīng)用場(chǎng)景開(kāi)發(fā)、驗(yàn)證及商用起到了極大的推動(dòng)作用。
北匯信息作為蜂窩車(chē)聯(lián)(C-V2X)工作組成員,2020年也參與到了由中國(guó)智能網(wǎng)聯(lián)汽車(chē)產(chǎn)業(yè)創(chuàng)新聯(lián)盟、IMT-2020(5G)推進(jìn)組C-V2X工作組、中國(guó)汽車(chē)工程學(xué)會(huì)等單位承辦的“C-V2X新四跨暨大規(guī)模先導(dǎo)應(yīng)用示范活動(dòng)“中,如圖8。

圖8北匯信息在“C-V2X新四跨暨大規(guī)模先導(dǎo)應(yīng)用示范活動(dòng)“
北匯信息專(zhuān)注于汽車(chē)電子,深耕C-V2X測(cè)試,提供專(zhuān)業(yè)多元化的C-V2X測(cè)試系統(tǒng)搭建及測(cè)試咨詢服務(wù)。
本次為大家簡(jiǎn)單介紹了中國(guó)V2X通訊標(biāo)準(zhǔn)應(yīng)用層標(biāo)準(zhǔn),后續(xù)將會(huì)為大家?guī)?lái)更多的基于C-V2X測(cè)試的相關(guān)內(nèi)容。同時(shí)也歡迎垂詢和溝通,共同探討。
注:本文圖片素材源于CSAE 53-2017合作式智能運(yùn)輸系統(tǒng) 車(chē)用通信系統(tǒng)應(yīng)用層及應(yīng)用數(shù)據(jù)交互標(biāo)準(zhǔn)、CSAE 53-2020合作式智能運(yùn)輸系統(tǒng) 車(chē)用通信系統(tǒng)應(yīng)用層及應(yīng)用數(shù)據(jù)交互標(biāo)準(zhǔn)(第一階段)、CSAE 157-2020合作式智能運(yùn)輸系統(tǒng) 車(chē)用通信系統(tǒng)應(yīng)用層及應(yīng)用數(shù)據(jù)交互標(biāo)準(zhǔn)(第二階段)
-
智能網(wǎng)聯(lián)汽車(chē)
+關(guān)注
關(guān)注
9文章
1095瀏覽量
31153
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
C-V2X測(cè)試探秘系列之電磁兼容試驗(yàn)方法

MHMF092L1C2-MINAS A6 系列 標(biāo)準(zhǔn)規(guī)格書(shū) 松下

是德科技出席2024 C-V2X“四跨”(上海)先導(dǎo)應(yīng)用實(shí)踐活動(dòng)
PCM2707C是否支持Android系統(tǒng)?PCM2707C Android應(yīng)用層怎么寫(xiě)?
物聯(lián)網(wǎng)設(shè)備的標(biāo)準(zhǔn)與規(guī)范
C-V2X聯(lián)合RTK技術(shù)的場(chǎng)景仿真方案
Linux應(yīng)用層控制外設(shè)的兩種不同的方式
60V 容差板和標(biāo)準(zhǔn) TPS272C45 評(píng)估模塊之間的差異

C-V2X安全證書(shū):保障車(chē)路云系統(tǒng)通信安全的關(guān)鍵
數(shù)字證書(shū)與數(shù)字簽名:汽車(chē)C-V2X通信安全的基石

Qorvo半導(dǎo)體解碼車(chē)聯(lián)網(wǎng):探索駕駛的未來(lái)浪潮與標(biāo)準(zhǔn)化
車(chē)聯(lián)萬(wàn)物C-V2X與背后的連接組件
5G車(chē)聯(lián)網(wǎng)按下加速鍵,三大廠商亮劍,5G車(chē)規(guī)模組新品有何亮點(diǎn)?

Samtec應(yīng)用科普 | C-V2X技術(shù)在汽車(chē)領(lǐng)域的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論