 【新手掃盲】手把手教你創建自己的ROS2應用(一)
【新手掃盲】手把手教你創建自己的ROS2應用(一)
系列文章背景介紹
X3派的官方文檔雖然非常的詳細,但是基本都是以簡單的單一示例進行相關的介紹和說明,不是特別的系統,當我們了解文檔的內容、嘗試了示例的運行后仍然需要系統化的去掌握相關的知識,特別是新手小白用戶,會非常迷茫且無從下手。
該系列文章的相關知識來源于官方文檔,以從零開始的視角將文檔中所有的示例整合到自己的ROS應用包中變得更加系統化,也方便后續配合自己的業務進行優化和迭代。
一、開發環境的搭建
1、以【root】身份SSH登錄到X3派
登錄密碼為:root,IP地址替換為自己的實際IP地址。
ssh root@192.168.31.1922、在X3派中執行下面的命令腳本進行系統的更新以及ROS2編譯環境依賴安裝
apt -y update && apt -y full-upgrade && apt-get install -y python3-catkin-pkg && pip install empy && pip install -U colcon-common-extensions二、創建ROS2工作空間
知識點:在ROS中,一個工作空間可以包含很多的功能包。
1、通過下面的命令腳本創建工作空間,比如我希望把工作空間放到/opt/workspace/geek_tros路徑
mkdir -p /opt/workspace/geek_tros2、進入到剛剛創建好的工作空間中
cd /opt/workspace/geek_tros3、加載啟動ROS2環境
知識點:該命令的目的是將ROS2環境加入到bash中,可以理解為配置ROS2環境變量的過程,這樣我們才能在后面正常使用ros2的相關命令。值得注意的是這個方式只在當前登錄的命令行終端生效,當我們每次退出登錄或者關閉命令行終端再次進入時都需要重新執行這條命令腳本。
source /opt/tros/setup.bash三、創建一個ROS2功能包
1、通過下面命令創建名為example_package的功能包,通過這個功能包實現簡單的人體檢測功能
知識點:ros2 pkg create是創建功能包的命令,example_package為功能包的名稱(可以自己取名),命令中的--build-type參數為功能包的編譯方式,--dependencies參數為功能包關聯的相關依賴庫,其中rclcpp和sensor_msgs均為ROS2官方提供庫,dnn_node為地平線的AI推理庫。
ros2 pkg create example_package --build-type ament_cmake --dependencies rclcpp sensor_msgs dnn_node2、通過下面的命令腳本創建功能包的程序文件:example.cpp,也可以自己取名
touch /opt/workspace/geek_tros/example_package/src/example.cpp四、開發工具
接下來就是代碼的編寫工作了,這里使用CLion作為我們的后續的開發工具,我們將借助CLion的遠程開發方式進行功能包的程序開發。
1、下載并安裝Clion
下載地址:https://www.jetbrains.com/clion/2、再本地電腦中找一個位置用于存放功能包的源碼,例如我的是【D:\GeekROS\geek_tros\】,使用Clion打開這個目錄
3、點擊Clion的【File】->【Settings】
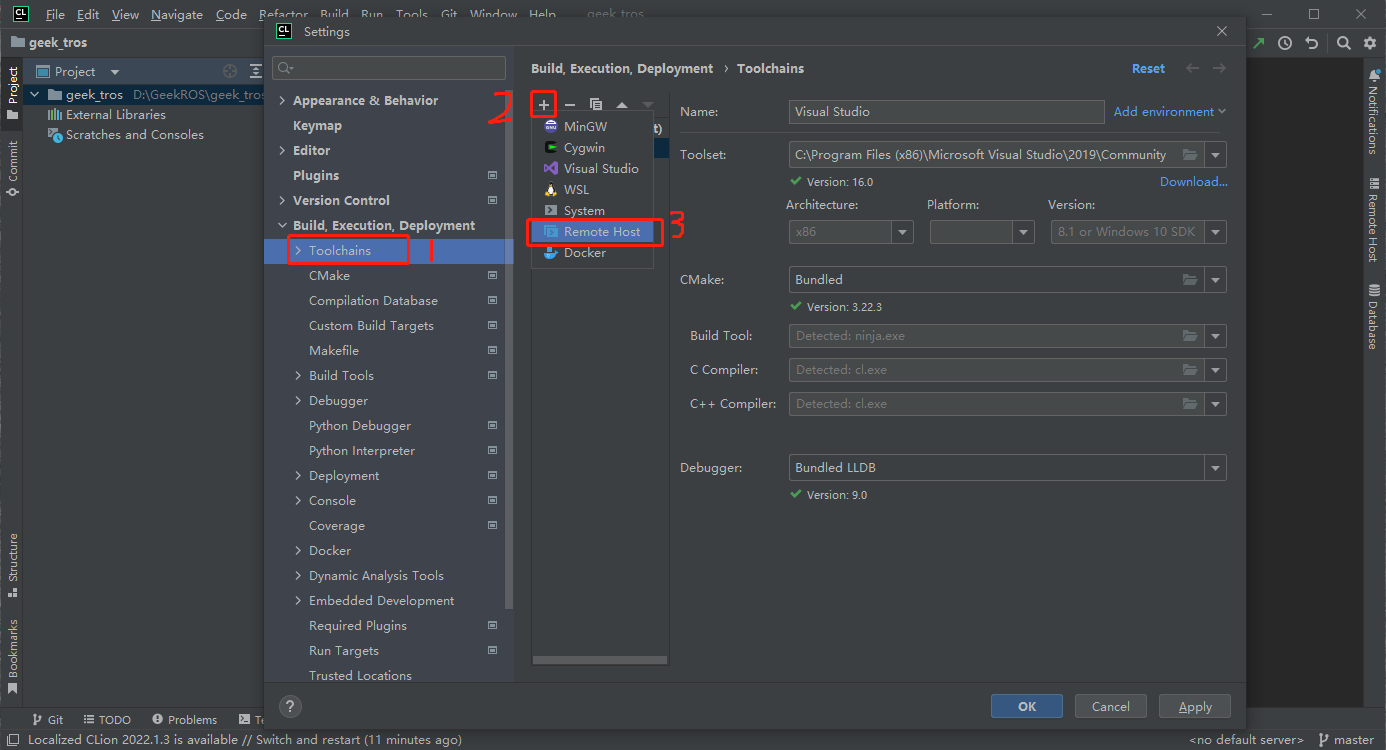
4、在彈出的窗口中依次選擇【Toolchains】->【+】->【Remote Host】
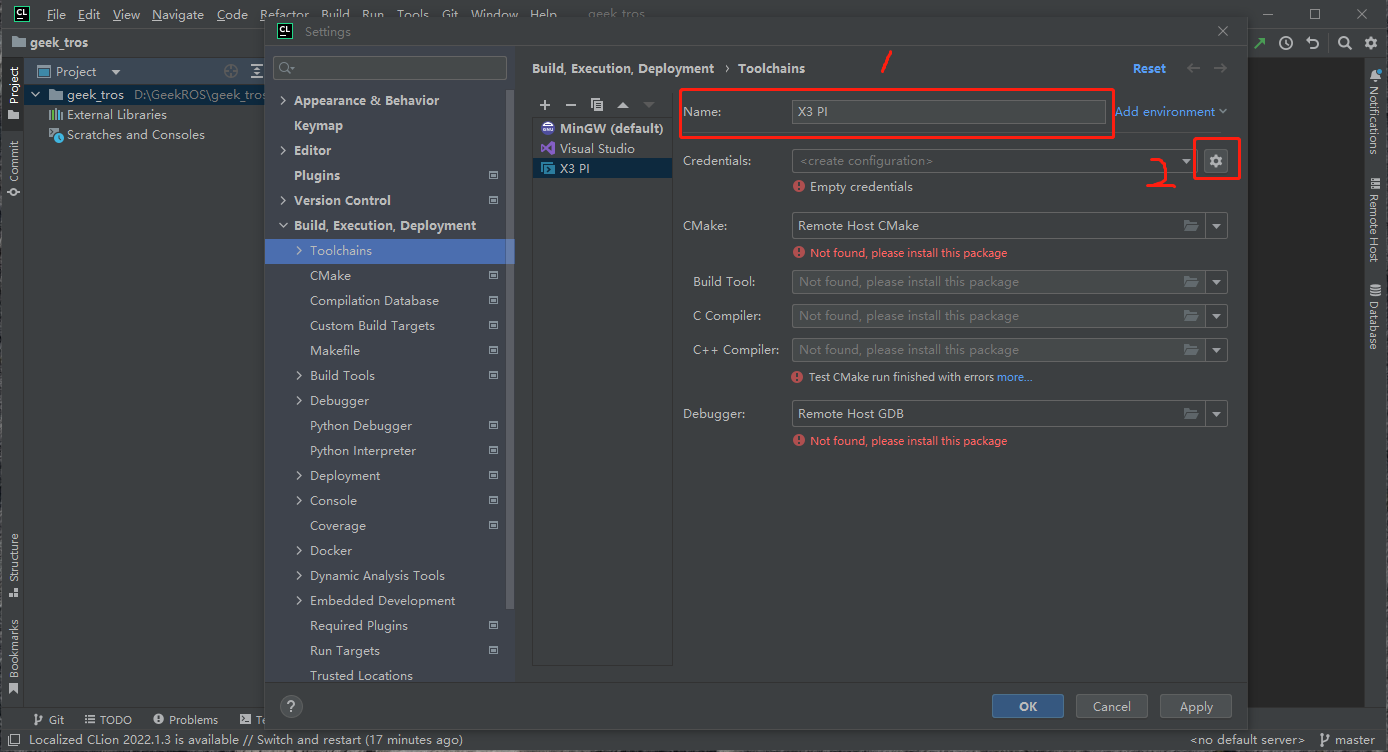
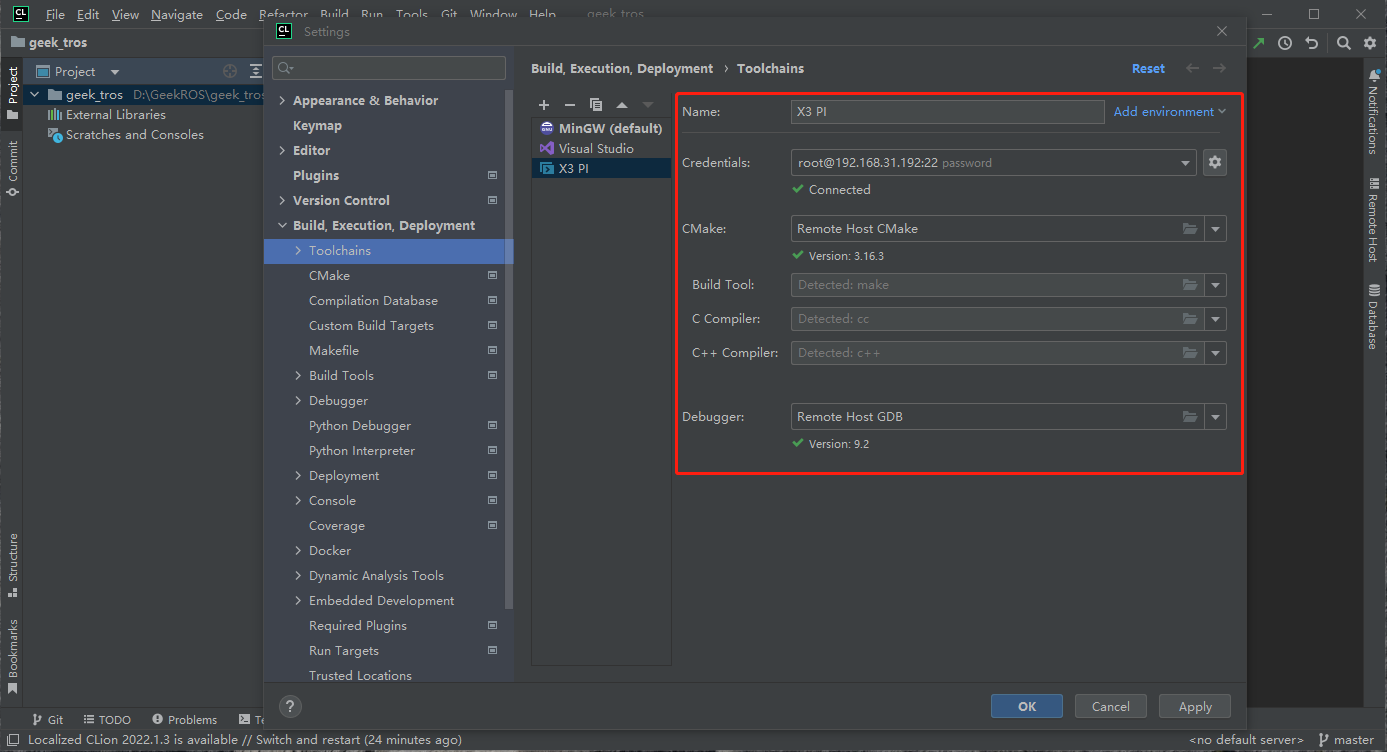
5、選擇【Remote Host】后的界面如下,其中【Name】自己取一個,然后點擊【齒輪】按鈕
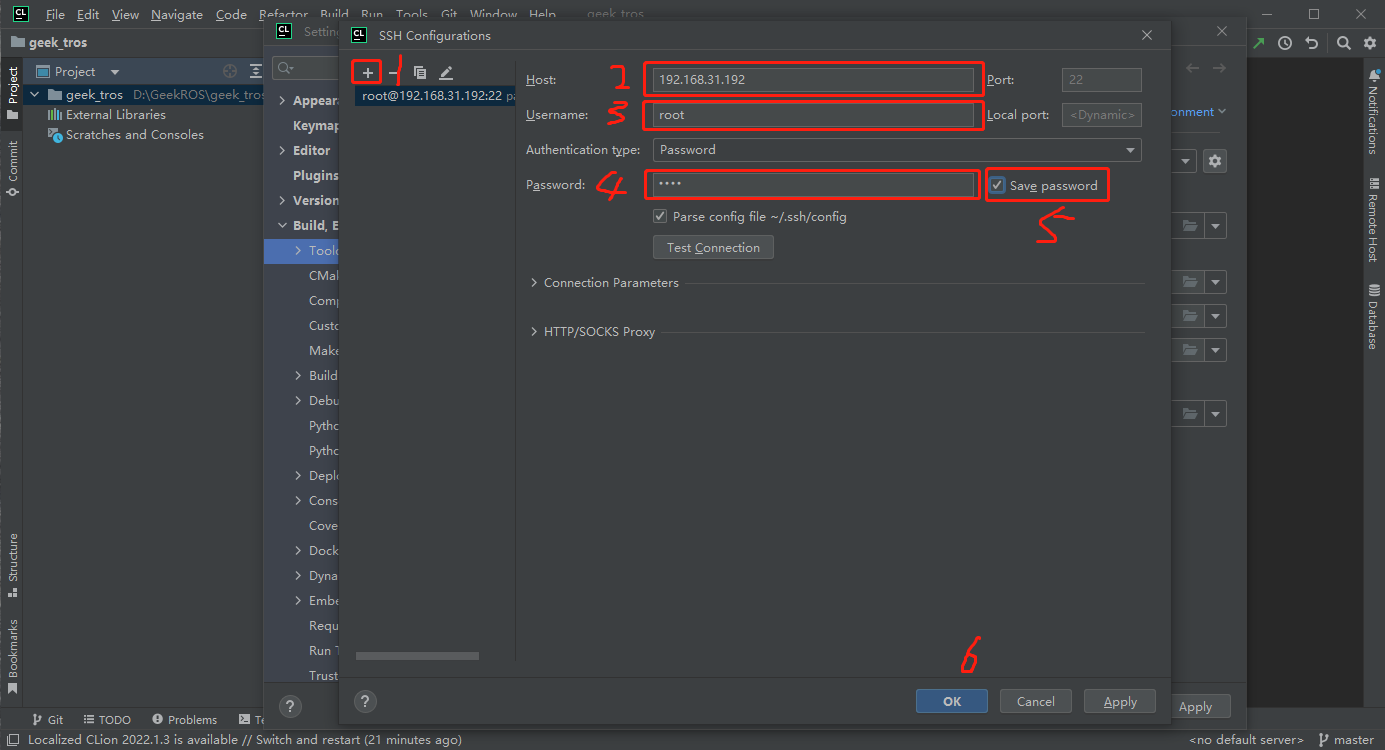
6、再彈出的窗口中選擇【+】,根據圖示填寫X3派的遠程主機連接相關配置信息,點擊【OK】
7、配置成功后會看到如下圖所示的信息,點擊【OK】
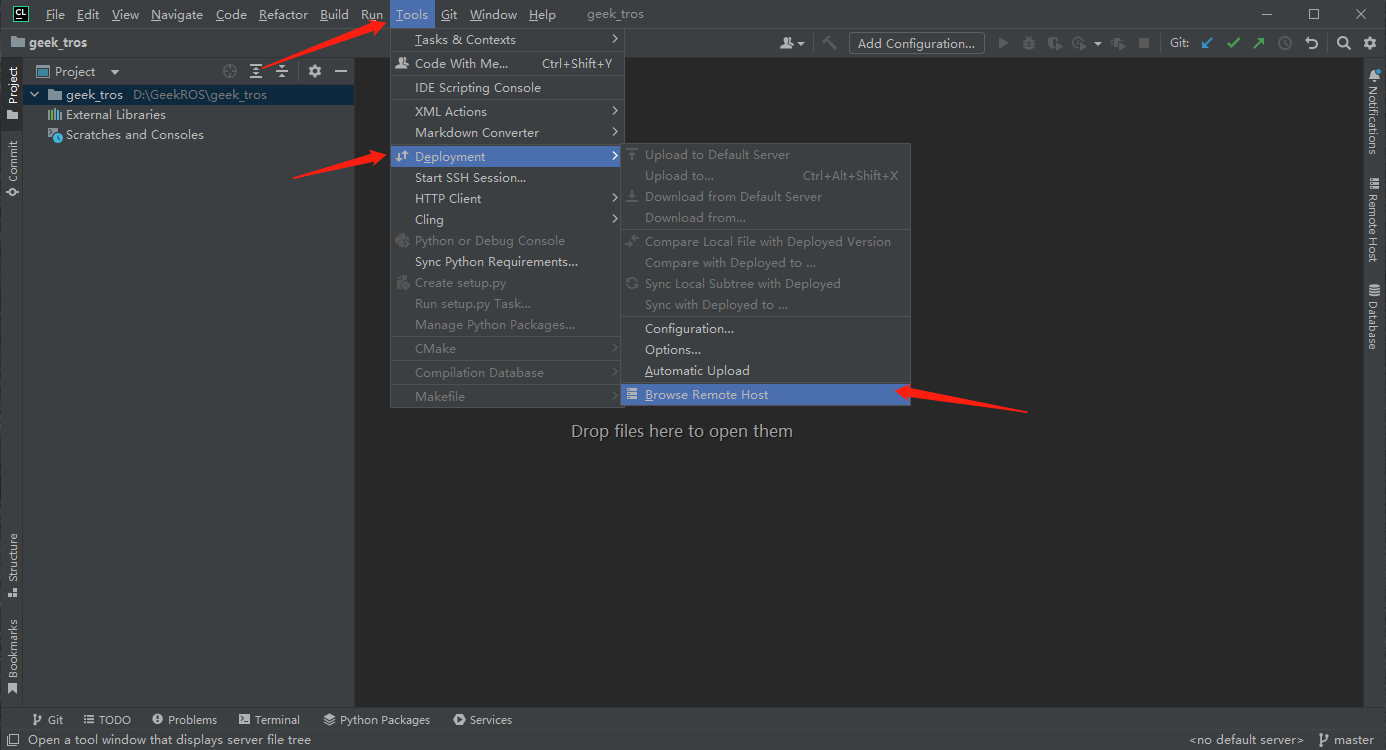
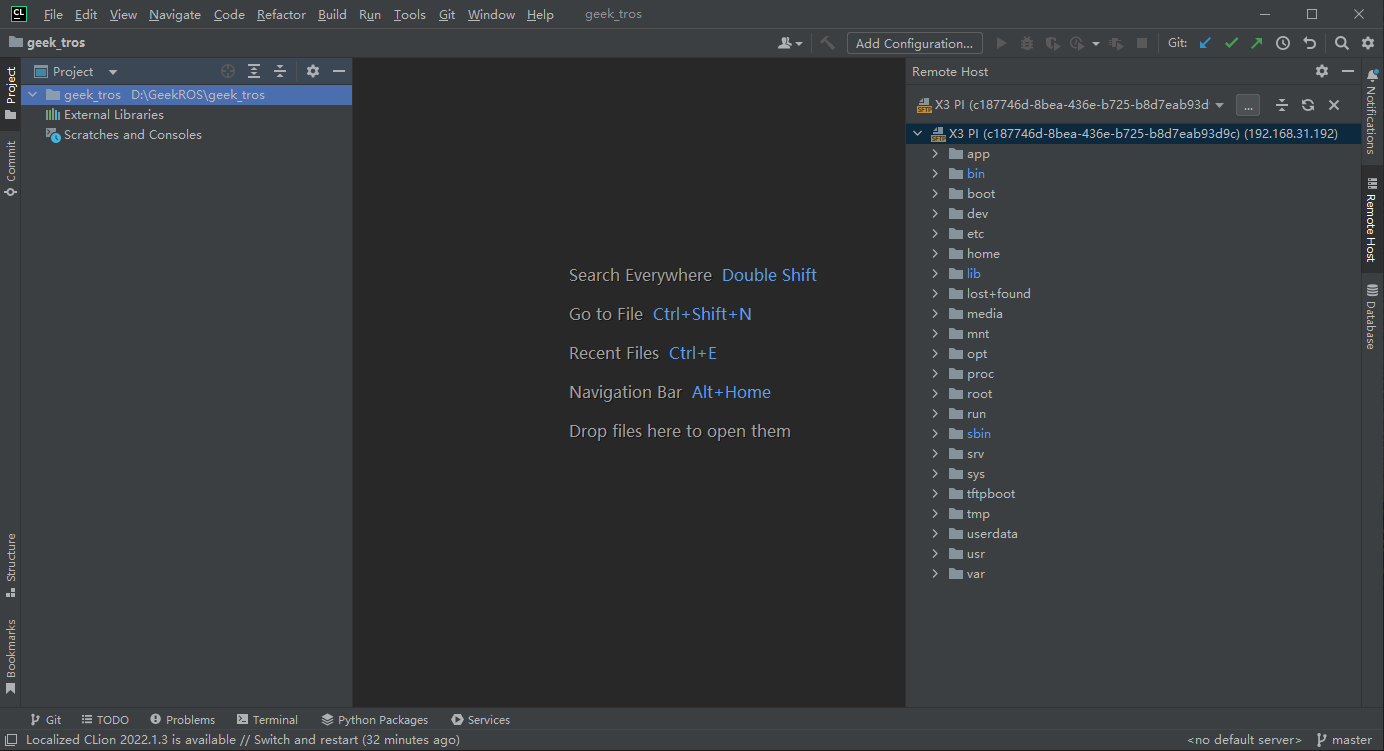
8、根據下圖所示,打開遠程主機的文件游覽器
9、在彈出的界面中,通過下拉菜單選擇剛剛配置的遠程主機
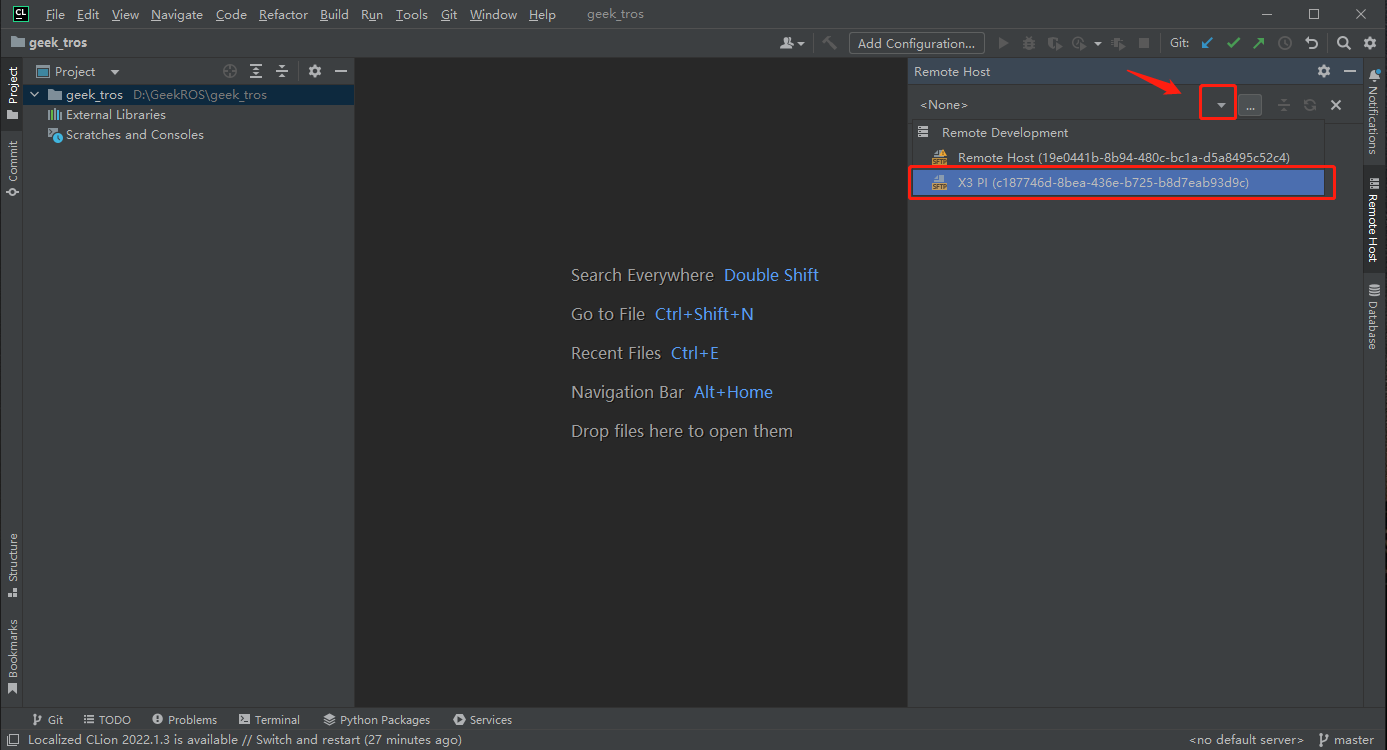
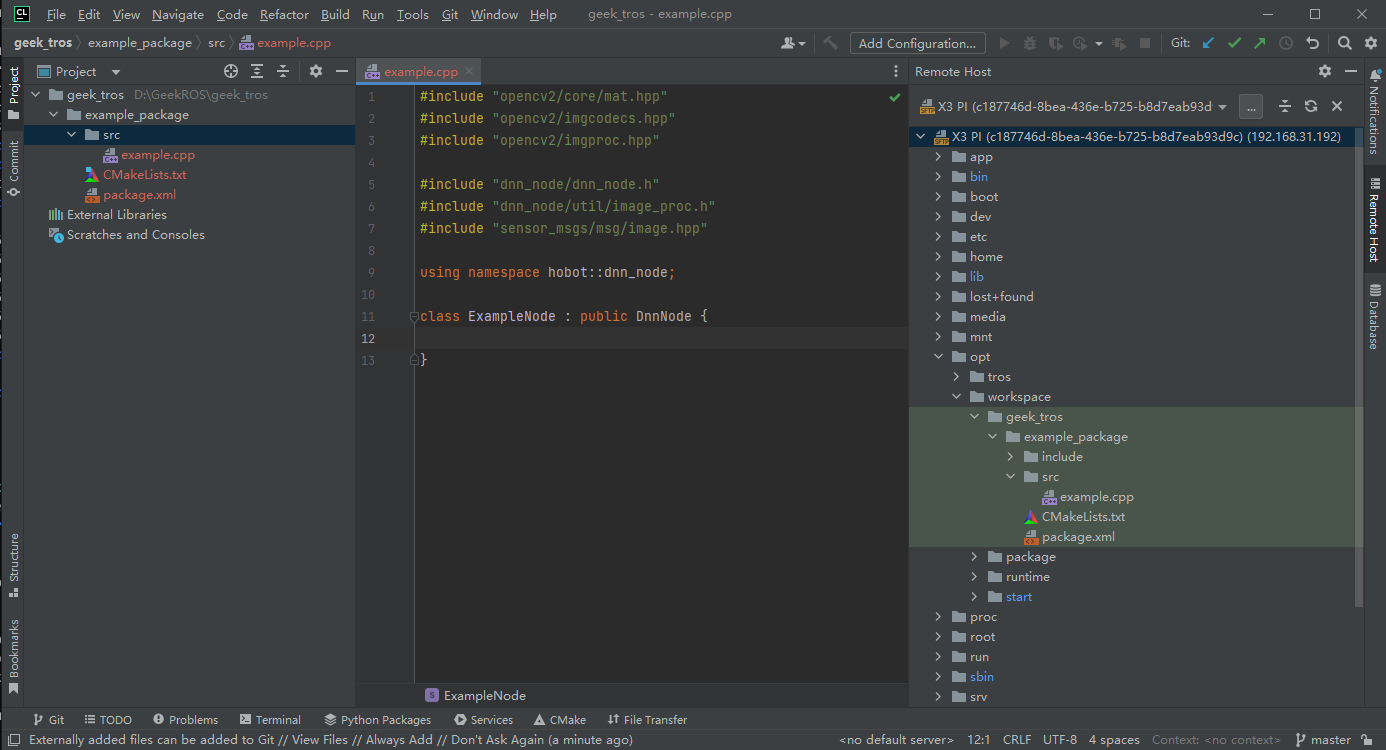
10、選擇后你會看到X3派遠程主機上的文件資源
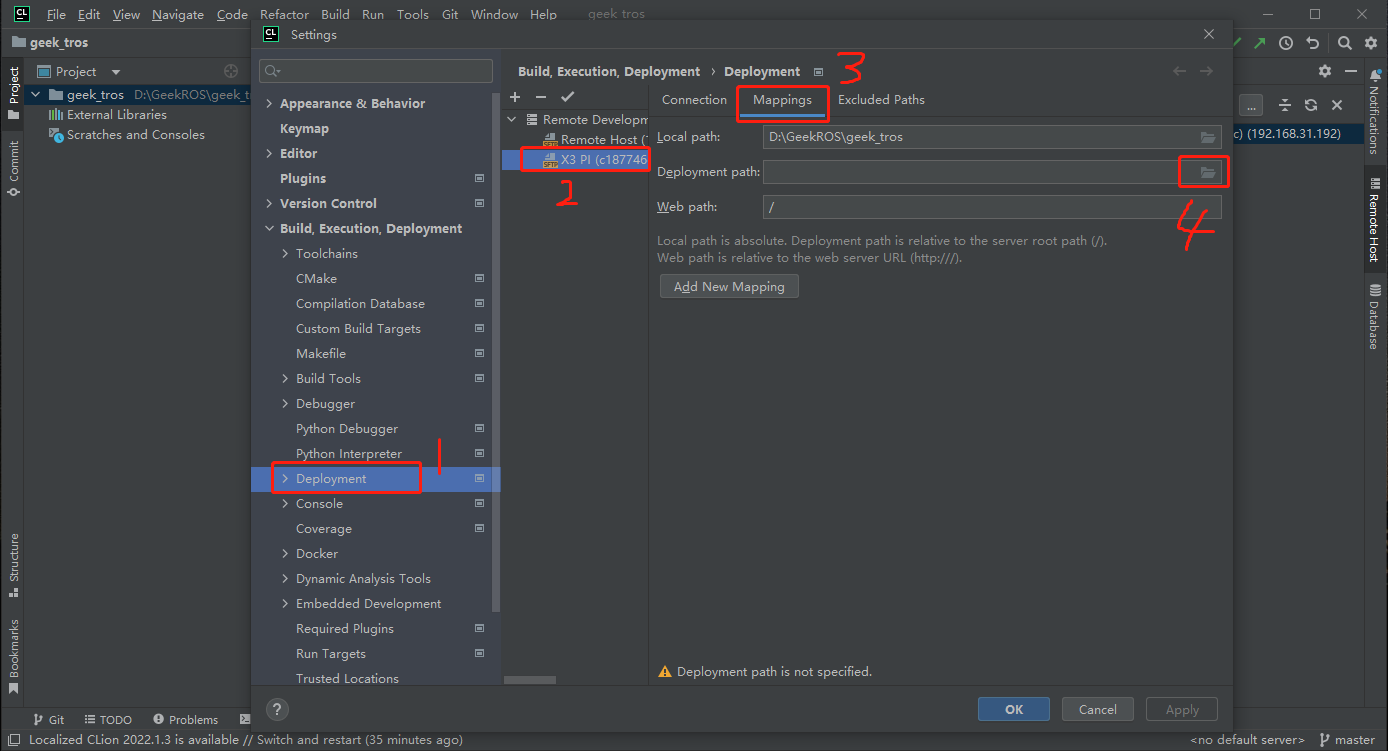
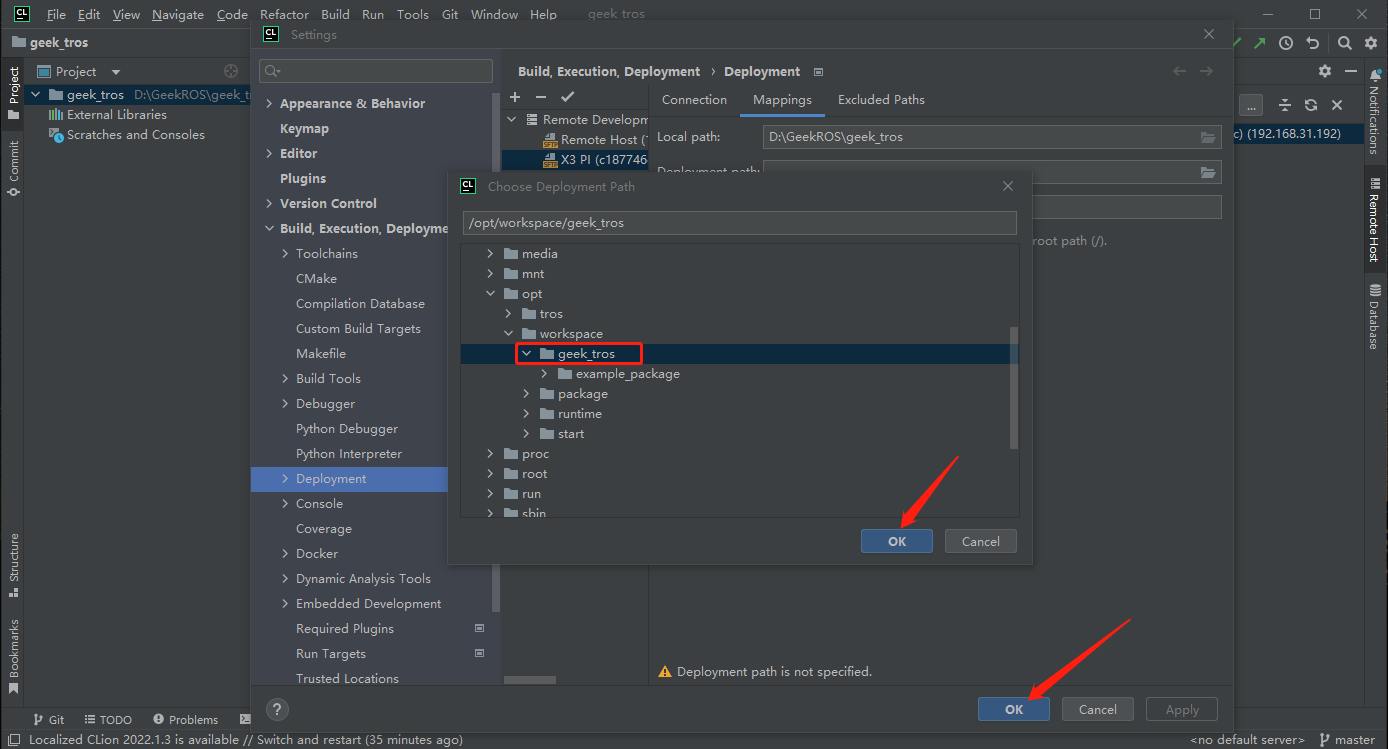
11、點擊Clion的【File】->【Settings】,在彈出的窗口按照下圖所示選擇X3派中的ROS2工作空間
12、到這里我就完成了遠程開發的相關配置,在項目名上右鍵可以看到相關的操作菜單,每次修改完代碼,我們進行本地程序和X3派遠程程序的上傳和下載操作
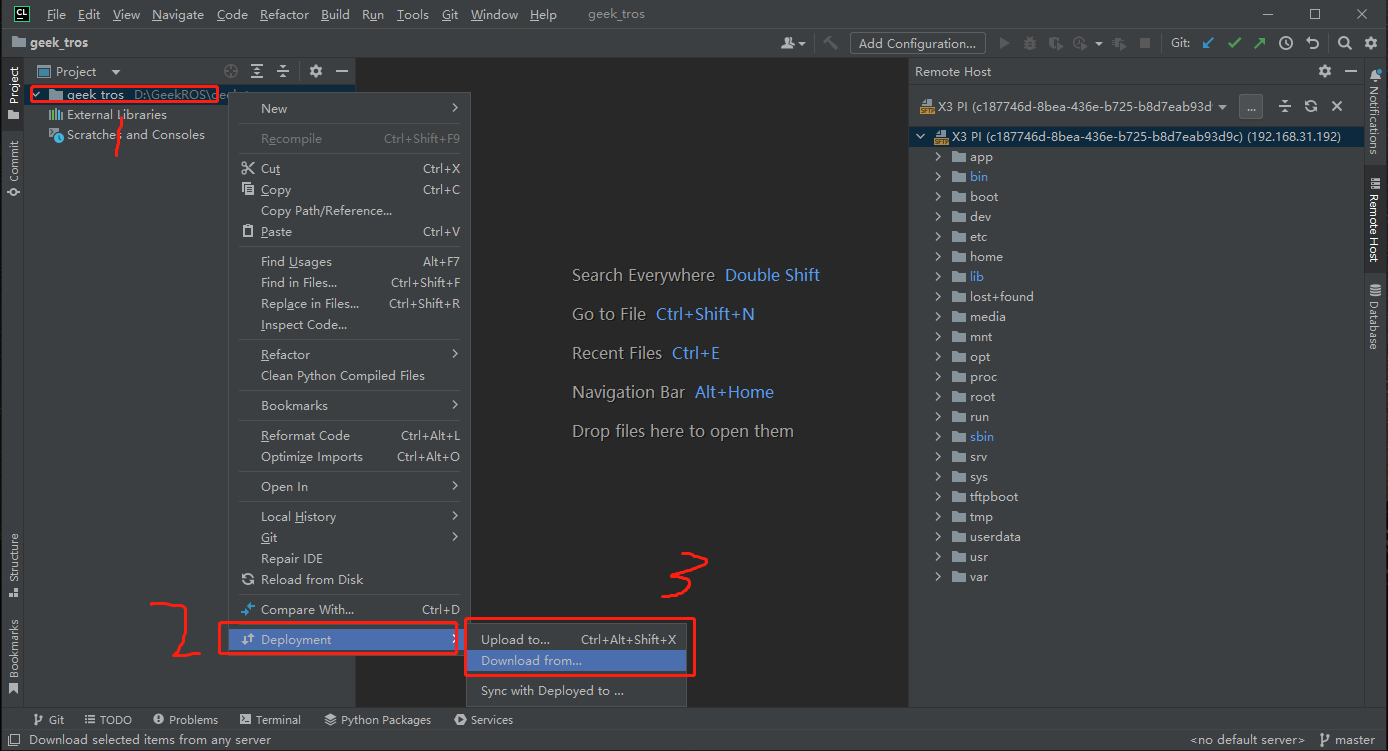
13、按照上圖的三步操作可以將X3派的程序下載到本地電腦進行代碼編寫
14、你也可以使用CLion中的命令行工具直連X3派進行命令行的調試

五、本章節概述
通過本章節的閱讀,你將掌握TROS的部署、開發環境的搭建、工作空間及功能包的創建、開發工具及遠程開發方式配置。
下一節我們將進行example_package功能包的開發,實現完整的人體檢測應用。
原作者:MakerYang
-
嵌入式
+關注
關注
5092文章
19177瀏覽量
307655 -
AIoT
+關注
關注
8文章
1418瀏覽量
30951
發布評論請先 登錄
相關推薦
使用myCobot 280機械臂結合ROS2系統搭建機械分揀站

《手把手教你做星閃無人機》即將開播,鎖定15日晚七點!

《手把手教你做PC》課程即將啟動!深開鴻引領探索KaihongOS筆記本電腦開發實戰
Air780E模組LuatOS開發實戰 —— 手把手教你搞定數據打包解包


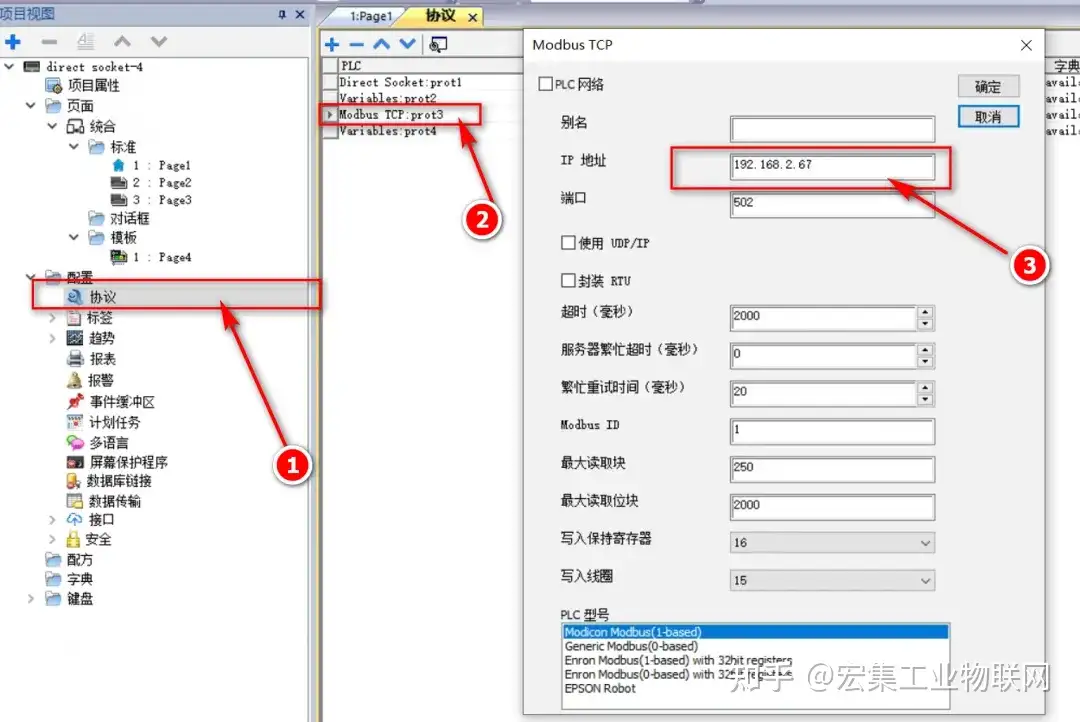
手把手教你通過宏集物聯網工控屏&網關進行協議轉換,將底層PLC/傳感器的數據轉換為TCP協議并傳輸到用戶
手把手教你在orcad中設置CIS元器件數據庫,提高工作效率

手把手教你排序算法怎么寫

手把手帶你移植HAL庫函數
ZMC900E控制器之ROS2環境安裝指南

手把手教你制作高速吹風機






 工商網監
工商網監
評論