") 旭日X3派BPU部署教程系列之帶你輕松走出模型部署新手村
旭日X3派BPU部署教程系列之帶你輕松走出模型部署新手村
安裝準(zhǔn)備
本部分主要介紹在使用工具鏈前必須的環(huán)境準(zhǔn)備工作,包含開發(fā)機(jī)部署(個(gè)人電腦)和開發(fā)板部署(例如旭日開發(fā)板等包含BPU設(shè)備)兩個(gè)部分。
開發(fā)機(jī)部署(個(gè)人電腦)
官方的示例教程的開發(fā)機(jī)都是Linux系統(tǒng),實(shí)際上Windows系統(tǒng)也是可以的。最建議的方式是利用docker,模型轉(zhuǎn)換過程主要還是基于CPU,用不到GPU,所以用docker就夠了。
(1)安裝docker
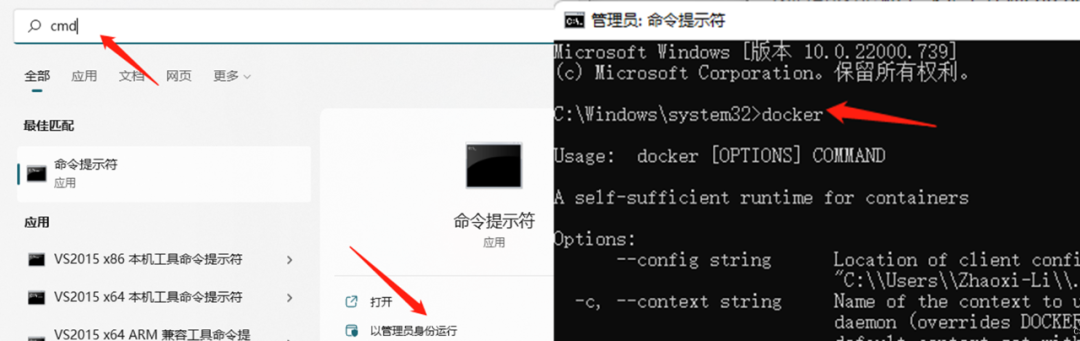
考慮到用戶多數(shù)是基于個(gè)人電腦,所以相關(guān)環(huán)境的配置都是基于Windows的。相關(guān)文檔內(nèi)提供了Docker Desktop Installer.exe安裝文件(見地平線開發(fā)者社區(qū)),安裝之后,用管理員方式啟動(dòng)得到如下界面。

我們可以從地平線天工開物cpu docker hub獲取部署所需要的CentOS Docker鏡像。使用最新鏡像v1.13.6,以管理員模式運(yùn)行CMD,輸入docker,可以顯示出docker的幫助信息。
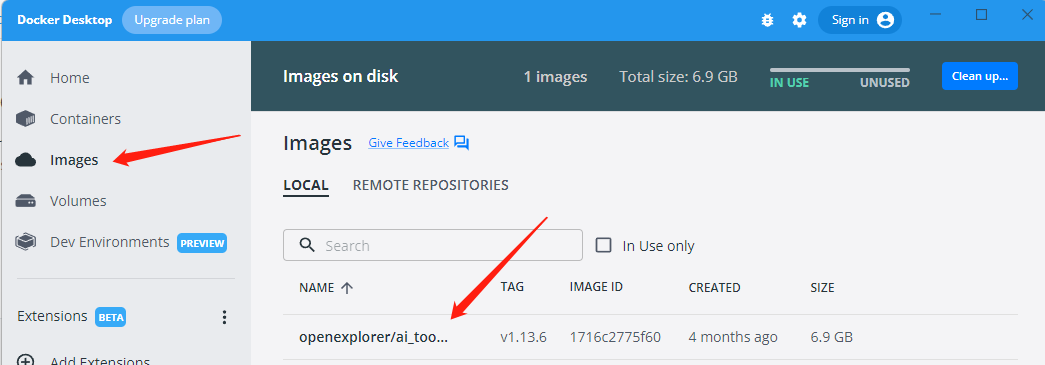
選擇最新版本,則在cmd中輸入命令docker pull openexplorer/ai_toolchain_centos_7:v1.13.6,即可自動(dòng)開始docker的安裝。
安裝成功之后,即可在docker中查看成功安裝的工具鏈鏡像:
(2)配置天工開物OpenExplorer
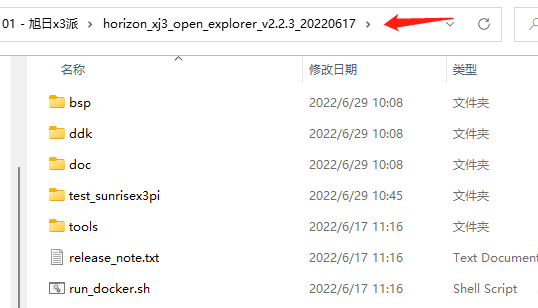
OpenExplorer工具包的下載,需要wget支持,wget的下載鏈接為GNU Wget for Windows,安裝好之后即可在cmd中通過如下命令下載工具包,解壓后,工具包的內(nèi)容如下所示,如果需要其他版本的,可以參考官網(wǎng)信息資料下載專區(qū)。
docker除了要掛載OpenExplorer工具包,還要掛載數(shù)據(jù)集文件夾,通過如下指令可以下載官方提供的數(shù)據(jù)集,或者從相關(guān)文檔中的的OpenExplorer/dataset文件夾中下載,下載之后記得解壓。
# cifar wget -c ftp://vrftp.horizon.ai/Open_Explorer/eval_dataset/cifar-10.tar.gz # cityscapes wget -c ftp://vrftp.horizon.ai/Open_Explorer/eval_dataset/cityscapes.tar.gz # coco wget -c ftp://vrftp.horizon.ai/Open_Explorer/eval_dataset/coco.tar.gz # imagenet wget -c ftp://vrftp.horizon.ai/Open_Explorer/eval_dataset/imagenet.tar.gz # VOC wget -c ftp://vrftp.horizon.ai/Open_Explorer/eval_dataset/VOC.tar.gz
(PS.由于作者在Windows下解壓導(dǎo)致部分軟連接消失,因此補(bǔ)充一些必要的軟連接更新)
# 重新構(gòu)建model_zoo軟連接 rm /open_explorer/ddk/samples/ai_toolchain/horizon_model_convert_sample/01_common/model_zoo ln -s /open_explorer/ddk/samples/ai_toolchain/model_zoo /open_explorer/ddk/samples/ai_toolchain/horizon_model_convert_sample/01_common/model_zoo
(3) 啟動(dòng)Docker
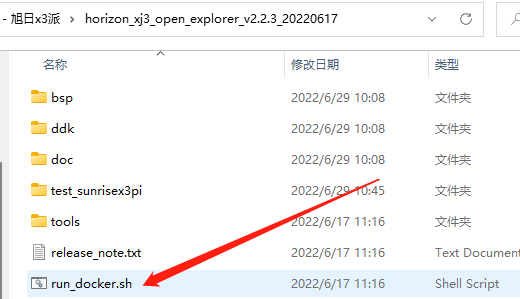
按照教程,啟動(dòng)docker要執(zhí)行run_docker.sh,可直接按照本文教程直接配置好指令即可。在進(jìn)入docker之前,先記錄兩個(gè)內(nèi)容:
天工開物OpenExplorer根目錄:我的環(huán)境下是"D:\05 - 項(xiàng)目\01 - 旭日x3派\horizon_xj3_open_explorer_v2.2.3_20220617",記得加雙引號(hào)防止出現(xiàn)空格,該目錄要掛載在docker中/open_explorer目錄下;
dataset根目錄:我的環(huán)境下是"D:\01 - datasets",記得加雙引號(hào)防止出現(xiàn)空格,該目錄需要掛載在docker中的/data/horizon_x3/data目錄下;
*輔助文件夾根目錄:官方教程其實(shí)是沒有這個(gè)過程的,我把這個(gè)掛載在docker里,就是充當(dāng)個(gè)類似U盤的介質(zhì)。比如在我的環(huán)境下是"D:\05 - 項(xiàng)目\01 - 旭日x3派\BPUCodes",我可以在windows里面往這個(gè)文件夾拷貝數(shù)據(jù),這些數(shù)據(jù)就可以在docker中使用,在docker中的路徑為/data/horizon_x3/codes。
那么,在cmd(管理員)中輸入如下指令即可進(jìn)入docker(切記要確保剛剛安裝的軟件docker desktop是開啟的),值得注意的是CMD不支持換行,記得刪掉后面的\然后整理為一行,這時(shí)我們可以看到由命令行掛載的3個(gè)目錄。
import cv2 # 打開攝像頭并顯示 docker run -it --rm \ -v "D:\05 - 項(xiàng)目\01 - 旭日x3派\horizon_xj3_open_explorer_v2.2.3_20220617":/open_explorer \ -v "D:\01 - datasets":/data/horizon_x3/data \ -v "D:\05 - 項(xiàng)目\01 - 旭日x3派\BPUCodes":/data/horizon_x3/codes \ openexplorer/ai_toolchain_centos_7:v1.13.6
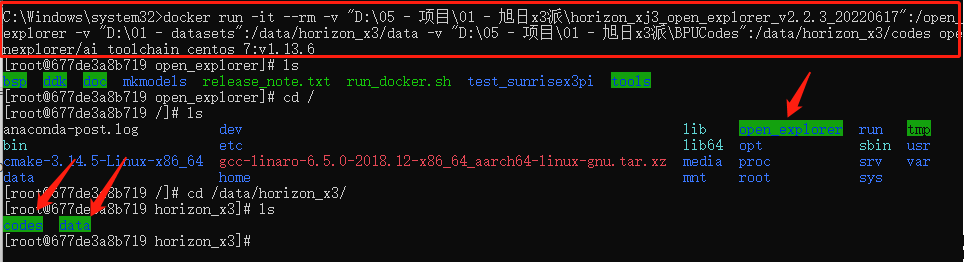
至此,已經(jīng)成功通過Docker鏡像進(jìn)入了完整的工具鏈開發(fā)環(huán)境。可以鍵入 hb_mapper --help 命令驗(yàn)證下是否可以正常得到幫助信息,hb_mapper 是工具鏈的一個(gè)常用工具, 在后文的模型轉(zhuǎn)換部分對(duì)其有詳細(xì)介紹。
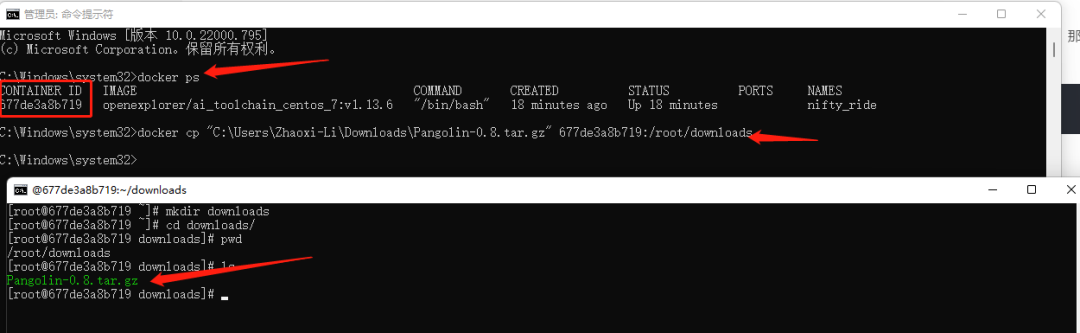
除了通過掛載個(gè)額外的文件夾來實(shí)現(xiàn)文件的拷貝,還有一個(gè)方法可以直接將文件拷貝到目標(biāo)目錄。
假如我們要拷貝一個(gè)文件"C:\Users\Zhaoxi-Li\Downloads\Pangolin-0.8.tar.gz"到docker中的/root/downloads下(目錄要存在),那么用管理員權(quán)限新開一個(gè)cmd,輸入docker ps,記錄CONTAINER ID,然后按照docker cp 本地文件的路徑 container_id:的方式輸入docker cp "C:\Users\Zhaoxi-Li\Downloads\Pangolin-0.8.tar.gz" 677de3a8b719:/root/downloads即可完成文件拷貝。
開發(fā)板部署(旭日3派為例)
在使用之前,一定要按照教程多方位玩轉(zhuǎn)《地平線新發(fā)布AIoT開發(fā)板——旭日X3派(Sunrise x3 Pi)》(可于「地平線開發(fā)者社區(qū)」-「開發(fā)者論壇」搜索查看)完成系統(tǒng)的啟動(dòng)。
工具鏈的部分補(bǔ)充工具未包含在系統(tǒng)鏡像中,這些工具已經(jīng)放置在Open Explorer發(fā)布包中。因此在我們剛剛拉取的docker中,輸入cd /open_explorer/ddk/package/board/,執(zhí)行命令bash install.sh 192.168.0.104,其中192.168.0.104為開發(fā)板IP地址,可用ifconfig查看。
這個(gè)功能主要就是拷貝hrt_bin_dump和hrt_model_exec到開發(fā)板,并在開發(fā)板的/etc/profile里面添加幾個(gè)環(huán)境,添加內(nèi)容如下所示。
#Horizon Open Explorer ENV export PATH=/userdata/.horizon/:/userdata/.horizon/ai_express_webservice_display/sbin/:$PATH export HORIZON_APP_PATH=/userdata/.horizon/:$HORIZON_APP_PATH #Horizon Open Explorer ENV
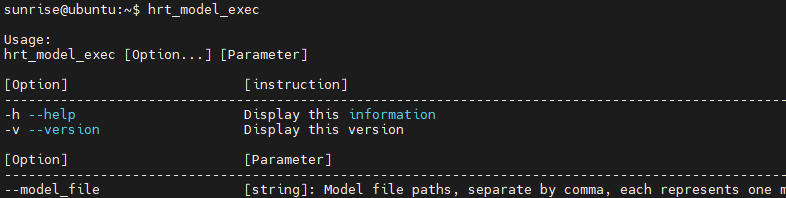
在開發(fā)板里輸入hrt_model_exec,如果有如下輸出,說明開發(fā)板部署完成。
模型部署
BPU的工具鏈?zhǔn)欠浅iL(zhǎng)的,在部署之前一定要先理解下每個(gè)流程的含義。
模型準(zhǔn)備
支持Caffe模型和ONNX模型,Caffe模型的支持度是最高的。咱們常用的Pytorch模型是可以轉(zhuǎn)為ONNX模型的。實(shí)際上,OpenCV內(nèi)部集成的dnn模塊也是以caffe為主的,所以盡管Caffe在學(xué)術(shù)圈不火了,但它在工業(yè)圈一直廣泛使用。
驗(yàn)證模型
驗(yàn)證模型中所用的層是否可以在BPU中使用。需要利用hb_mapper checker后面跟一堆參數(shù)來對(duì)模型進(jìn)行配置。配置信息如下:
--model-type:輸入的模型類型,onnx或caffe ;
--march:芯片類型,這個(gè)板子只能填bernoulli2;
--proto:若模型為caffe,則填入caffe所需的prototxt文件。onnx模型就不用寫這個(gè)參數(shù);
--model:模型文件,caffe就是*.caffemodel,onnx模型就是.onnx;
--input-shape:模型數(shù)據(jù)輸入的名稱和維度,比如輸入層名稱叫input1,維度為1x3x128x128,那么該參數(shù)就可以寫為--input-shape input1 1x3x128x128。如果我們的模型有多個(gè)輸入,比如第二個(gè)輸入層名稱叫input2,維度為1x96x28x28,那么參數(shù)設(shè)置就寫為--input-shape input1 1x3x128x128 --input-shape input2 1x96x28x28(該參數(shù)可選,不寫的話程序會(huì)自動(dòng)識(shí)別參數(shù),如果指定以指定為主);
--output:設(shè)置輸出日志文件(已經(jīng)移除,默認(rèn)存在根目錄的hb_mapper_checker.log中);
注意:如果模型檢查不通過,控制臺(tái)會(huì)有明顯的ERROR信息,一般都會(huì)檢查出某些層不支持BPU,這時(shí)候可以寫個(gè)自定義層來解決,后面會(huì)提供個(gè)例子來展示不通過情況的處理辦法。
轉(zhuǎn)換模型
模型檢查通過之后,就可以通過配置一個(gè)yaml文件來將模型文件轉(zhuǎn)為可以在BPU上運(yùn)行的文件了,后面配置模型時(shí)候會(huì)進(jìn)行詳細(xì)介紹。
--model-type:根據(jù)模型類型指定caffe或onnx;
--config:模型編譯的配置文件,內(nèi)容采用yaml格式,文件名使用.yaml后綴。
模型性能、精度分析與調(diào)優(yōu)
初時(shí)BPU的時(shí)候都會(huì)疑惑,為什么轉(zhuǎn)換模型后精度會(huì)有變化?因?yàn)槟P娃D(zhuǎn)換后是由float轉(zhuǎn)為int8計(jì)算的,這個(gè)過程必有精度損失。如果精度差異較大,就需要按照官方教程進(jìn)行調(diào)優(yōu)。
Yolov3部署示例
將yolov3放置在docker文件中的/open_explorer/ddk/samples/ai_toolchain/horizon_model_convert_sample/04_detection/02_yolov3_darknet53/mapper路徑下,以官方示例,來初步了解下BPU的相關(guān)操作流程。

模型準(zhǔn)備
prototxt和caffemodel文件放置在docker中的/open_explorer/ddk/samples/ai_toolchain/model_zoo/mapper/detection/yolov3_darknet53路徑下。

驗(yàn)證模型
/open_explorer/ddk/samples/ai_toolchain/horizon_model_convert_sample/04_detection/02_yolov3_darknet53/mapper,進(jìn)入該路徑后,輸入 ./01_check.sh,遇到下述這些輸出,就代表轉(zhuǎn)換完成了。
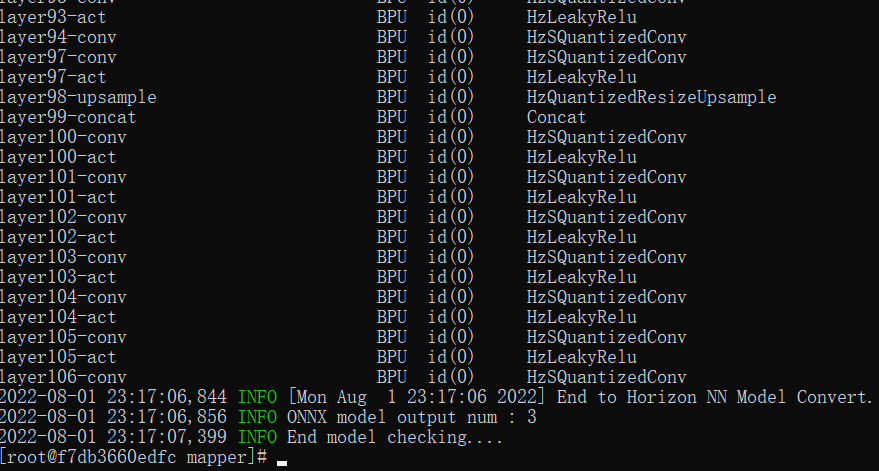
前面已經(jīng)介紹了,模型驗(yàn)證需要利用hb_mapper checker后面跟一堆參數(shù)來對(duì)模型進(jìn)行配置,下面這些就是 ./01_check.sh的主要內(nèi)容。

下面帶各位來理解這些參數(shù):
--model-type:我們這些模型是Caffe,所以填caffe;
--march:旭日X3派只能填bernoulli2;
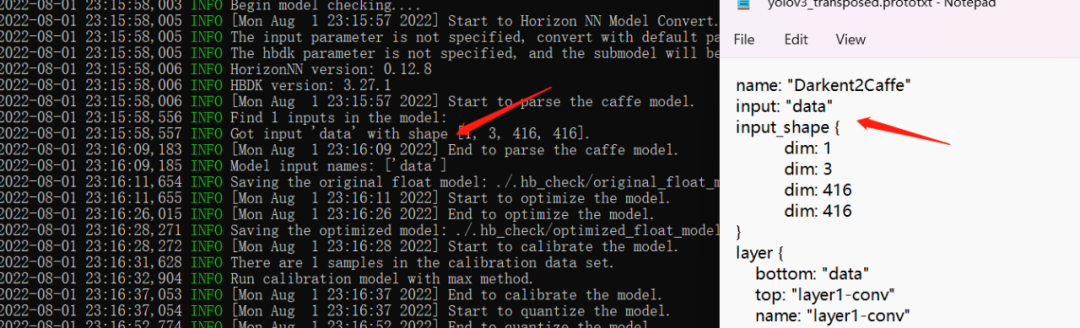
--proto:填prototxt文件路徑
即../../../01_common/model_zoo/mapper/detection/yolov3_darknet53/yolov3_transposed.prototxt;
--model:填caffemodel文件路徑
即../../../01_common/model_zoo/mapper/detection/yolov3_darknet53/yolov3.caffemodel;
--input-shape:這里沒有指定,代碼可以自動(dòng)去查找。
轉(zhuǎn)換模型
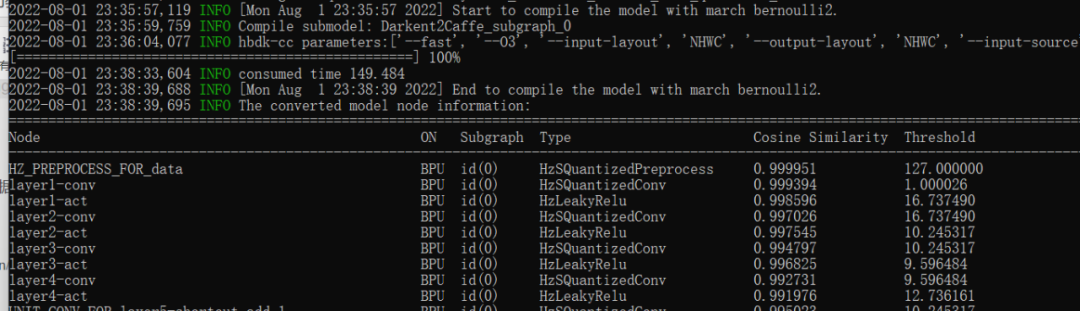
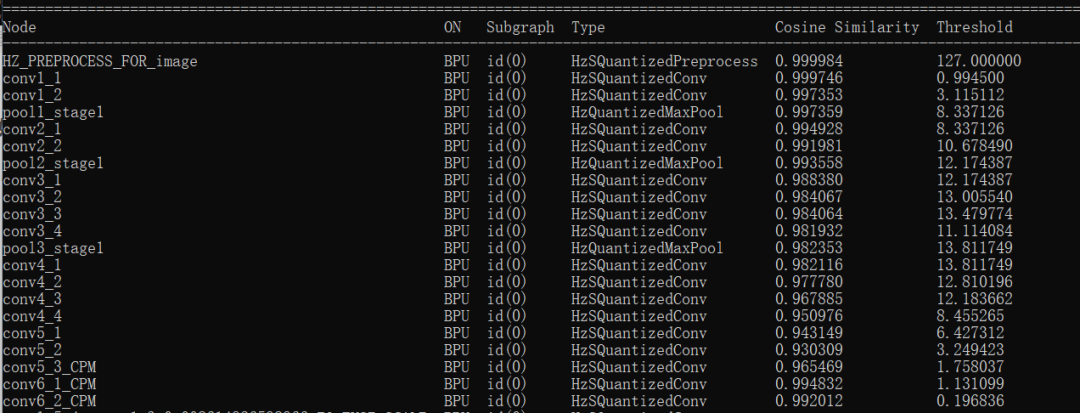
在轉(zhuǎn)換模型之前需要準(zhǔn)備校準(zhǔn)數(shù)據(jù),輸入./02_preprocess.sh會(huì)自動(dòng)從docker的open_explorer包中抽取數(shù)據(jù);再輸入./03_build.sh,輸出一大堆的命令行,等待一段時(shí)間之后會(huì)輸出。
這里我們可以發(fā)現(xiàn)每一層網(wǎng)絡(luò)都要評(píng)估一個(gè)相似度,這也是為什么要準(zhǔn)備校準(zhǔn)數(shù)據(jù),因?yàn)锽PU是INT8計(jì)算,所以注定會(huì)有精度損失。而且這些誤差也是可以傳遞的,所以到后面精度是越來越低的。如果網(wǎng)絡(luò)深度過高,也會(huì)導(dǎo)致整體精度的下降。
為了更好的理解這些轉(zhuǎn)換流程,將對(duì)其中的準(zhǔn)備校準(zhǔn)數(shù)據(jù)、模型轉(zhuǎn)換過程進(jìn)行一個(gè)完全解讀。
(1)原理解讀:準(zhǔn)備校準(zhǔn)數(shù)據(jù)
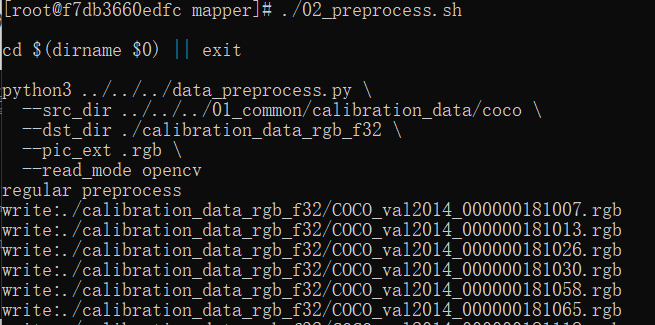
這個(gè)過程調(diào)用了腳本./02_preprocess.sh,這個(gè)腳本核心調(diào)用的是python文件,data_preprocess.py的源碼可以自行去查看。
python3 ../../../data_preprocess.py \ --src_dir ../../../01_common/calibration_data/coco \ --dst_dir ./calibration_data_rgb_f32 \ --pic_ext .rgb \ --read_mode opencv
然而data_preprocess.py并不適合初學(xué)者進(jìn)行閱讀,因?yàn)槠浼嫒萘颂鄸|西,很簡(jiǎn)單的一些功能硬是寫復(fù)雜了,那么就圍繞這個(gè)模型,給各位縷縷校準(zhǔn)數(shù)據(jù)到底要準(zhǔn)備啥。
首先要搞清楚,我們要準(zhǔn)備的校準(zhǔn)數(shù)據(jù)是什么樣的: 校準(zhǔn)數(shù)據(jù)要將圖像數(shù)據(jù)按照目標(biāo)尺寸、目標(biāo)顏色(rgb or bgr等)、目標(biāo)排布(CHW or HWC)進(jìn)行存儲(chǔ)。那么下面,帶著這些問題進(jìn)行處理,先構(gòu)建一個(gè)基本處理流程:
①加載一個(gè)文件夾下的所有圖像地址信息。圖像目錄為/open_explorer/ddk/samples/ai_toolchain/horizon_model_convert_sample/01_common/calibration_data/coco;
②對(duì)每個(gè)圖像按照校準(zhǔn)格式進(jìn)行輸出。從prototxt我們知道圖像的尺寸為416x416,從./03_build.sh調(diào)用的yaml文件可知圖像輸入格式為rgb,數(shù)據(jù)排布為CHW;
③將轉(zhuǎn)換后的圖像利用numpy.tofile函數(shù)存到目標(biāo)文件夾下(你在哪轉(zhuǎn)換的,就要在哪個(gè)目錄存校準(zhǔn)數(shù)據(jù)文件夾calibration_data)。
開始寫我們自己的Python代碼,每個(gè)步驟都寫了注釋,各位可以直接理解。
# prepare_calibration_data.py import os import cv2 import numpy as np src_root = '/open_explorer/ddk/samples/ai_toolchain/horizon_model_convert_sample/01_common/calibration_data/coco' cal_img_num = 100 # 想要的圖像個(gè)數(shù) dst_root = '/open_explorer/ddk/samples/ai_toolchain/horizon_model_convert_sample/04_detection/02_yolov3_darknet53/mapper/calibration_data' ## 1. 從原始圖像文件夾中獲取100個(gè)圖像作為校準(zhǔn)數(shù)據(jù) num_count = 0 img_names = [] for src_name in sorted(os.listdir(src_root)): if num_count > cal_img_num: break img_names.append(src_name) num_count += 1 # 檢查目標(biāo)文件夾是否存在,如果不存在就創(chuàng)建 if not os.path.exists(dst_root): os.system('mkdir {0}'.format(dst_root)) ## 2 為每個(gè)圖像轉(zhuǎn)換 # 參考了OE中/open_explorer/ddk/samples/ai_toolchain/horizon_model_convert_sample/01_common/python/data/下的相關(guān)代碼 # 轉(zhuǎn)換代碼寫的很棒,很智能,考慮它并不是官方python包,所以我打算換一種寫法 ## 2.1 定義圖像縮放函數(shù),返回為np.float32 # 圖像縮放為目標(biāo)尺寸(W, H) # 值得注意的是,縮放時(shí)候,長(zhǎng)寬等比例縮放,空白的區(qū)域填充顏色為pad_value, 默認(rèn)127 def imequalresize(img, target_size, pad_value=127.): target_w, target_h = target_size image_h, image_w = img.shape[:2] img_channel = 3 if len(img.shape) > 2 else 1 # 確定縮放尺度,確定最終目標(biāo)尺寸 scale = min(target_w * 1.0 / image_w, target_h * 1.0 / image_h) new_h, new_w = int(scale * image_h), int(scale * image_w) resize_image = cv2.resize(img, (new_w, new_h)) # 準(zhǔn)備待返回圖像 pad_image = np.full(shape=[target_h, target_w, img_channel], fill_value=pad_value) # 將圖像resize_image放置在pad_image的中間 dw, dh = (target_w - new_w) // 2, (target_h - new_h) // 2 pad_image[dh:new_h + dh, dw:new_w + dw, :] = resize_image return pad_image ## 2.2 開始轉(zhuǎn)換 for each_imgname in img_names: img_path = os.path.join(src_root, each_imgname) img = cv2.imread(img_path) # BRG, HWC img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) # RGB, HWC img = imequalresize(img, (416, 416)) img = np.transpose(img, (2, 0, 1)) # RGB, CHW # 將圖像保存到目標(biāo)文件夾下 dst_path = os.path.join(dst_root, each_imgname + '.rgbchw') print("write:%s" % dst_path) # 圖像加載默認(rèn)就是uint8,但是不加這個(gè)astype的話轉(zhuǎn)換模型就會(huì)出錯(cuò) # 轉(zhuǎn)換模型時(shí)候,加載進(jìn)來的數(shù)據(jù)竟然是float64,不清楚內(nèi)部是怎么加載的。 img.astype(np.uint8).tofile(dst_path) print('finish')
(2)原理解讀:轉(zhuǎn)換配置
模型轉(zhuǎn)換的核心在于配置目標(biāo)的yaml文件,官方也提供了一個(gè)yolov3_darknet53_config.yaml可供用戶直接試用,每個(gè)參數(shù)都給了注釋,我能感受到開發(fā)者的誠(chéng)意。然而模型轉(zhuǎn)換的配置文件參數(shù)太多,如果想改參數(shù)都不知道如何下手。
本節(jié)目的是引導(dǎo)各位快速上手,因此一些參數(shù)我暫時(shí)不解釋意義,用默認(rèn)即可。該模板可將待配置的30多個(gè)參數(shù)壓縮到9個(gè)參數(shù),方便各位快速的配置簡(jiǎn)單模型。本yaml模板適用于的模型具有如下屬性:
- 無自定義層,換句話說,BPU支持該模型的所有層;
- 輸入節(jié)點(diǎn)只有1個(gè),且輸入是圖像。
先復(fù)制這個(gè)模板到代碼根目錄,命名為"yolov3_simple.yaml",然后根據(jù)后面的思維導(dǎo)圖進(jìn)行配置具體參數(shù)。
model_parameters: # [待配置參數(shù)],見思維導(dǎo)圖"模型參數(shù)組"部分 prototxt: '***.prototxt' caffe_model: '****.caffemodel' onnx_model: '****.onnx' output_model_file_prefix: 'mobilenetv1' # 默認(rèn)參數(shù),暫不需要理解 march: 'bernoulli2' input_parameters: # [待配置參數(shù)],見思維導(dǎo)圖"輸入信息參數(shù)組/原始模型參數(shù)"部分 input_type_train: 'bgr' input_layout_train: 'NCHW' # [待配置參數(shù)],見思維導(dǎo)圖"輸入信息參數(shù)組/轉(zhuǎn)換后模型參數(shù)"部分 input_type_rt: 'yuv444' # [待配置參數(shù)],見思維導(dǎo)圖"輸入信息參數(shù)組/輸入數(shù)據(jù)預(yù)處理"部分 norm_type: 'data_mean_and_scale' mean_value: '103.94 116.78 123.68' scale_value: '0.017' # 默認(rèn)參數(shù),暫不需要理解 input_layout_rt: 'NHWC' # 校準(zhǔn)參數(shù)組,全部默認(rèn) calibration_parameters: cal_data_dir: './calibration_data' calibration_type: 'max' max_percentile: 0.9999 # 編譯參數(shù)組,全部默認(rèn) compiler_parameters: compile_mode: 'latency' optimize_level: 'O3' debug: False # 別看官網(wǎng)寫的可選,實(shí)際上不寫這個(gè)出bug
思維導(dǎo)圖如下所示,帶著這個(gè)圖,請(qǐng)各位耐心地跟我一步步配置,僅需要配置9個(gè)即可。
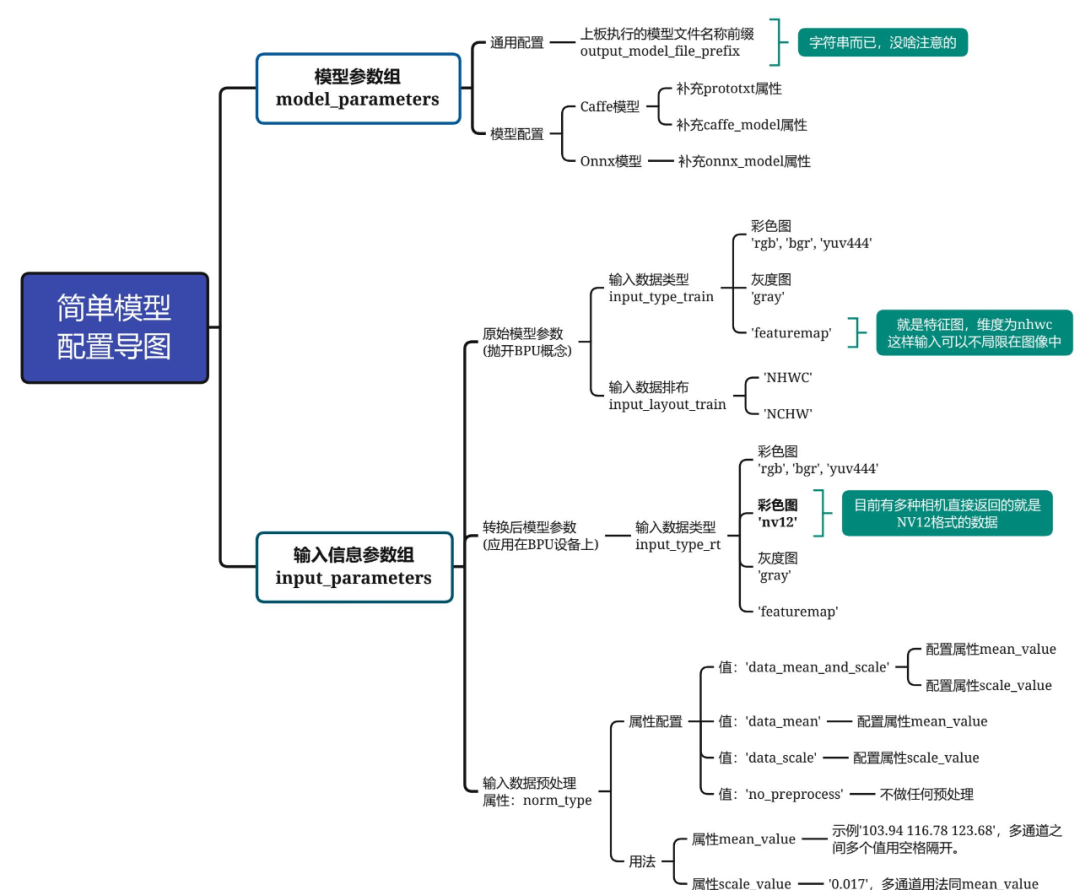
模型參數(shù)組參數(shù)model_parameters配置:
output_model_file_prefix:給轉(zhuǎn)換后的模型起個(gè)名,這里叫做'yolov3_selfyaml',注意字符串前后都要有個(gè)單引號(hào);
prototxt:caffe的prototxt,這里為'../../../01_common/model_zoo/mapper/detection/yolov3_darknet53/yolov3_transposed.prototxt';
caffe_model:caffe的模型文件,這里為'../../../01_common/model_zoo/mapper/detection/yolov3_darknet53/yolov3.caffemodel';
onnx_model:刪掉。因?yàn)槲覀冇玫氖荂affe。
輸入信息組參數(shù)配置input_parameters:
input_type_train:原始浮點(diǎn)模型的輸入數(shù)據(jù)格式,支持多種圖像格式,這里設(shè)置為'rgb'(這就是前文校準(zhǔn)模型時(shí)為什么要將BGR轉(zhuǎn)為RGB); input_layout_train:從前文的prototxt可以看出,數(shù)據(jù)輸入排布為'NCHW'(所以在模型校準(zhǔn)時(shí)我們將圖像數(shù)據(jù)由HWC轉(zhuǎn)為CHW) input_type_rt:模型轉(zhuǎn)換后,我們期望輸入的圖像格式。我們?cè)谟?xùn)練模型和部署模型的時(shí)候,圖像輸入格式是可以變的,NV12是一些相機(jī)返回的原始數(shù)據(jù)格式,作為嘗試設(shè)置為'nv12'; norm_type:網(wǎng)絡(luò)不可能拿原始圖像數(shù)據(jù)作為輸入的,一般都要進(jìn)行一個(gè)歸一化操作。這里用的模型對(duì)應(yīng)的歸一化代碼為inpBlob = cv2.dnn.blobFromImage(frame, 1.0 / 255, (inWidth, inHeight), (0, 0, 0), swapRB=False, crop=False),無減均值項(xiàng),只有尺度項(xiàng)。因此,該屬性設(shè)置為'data_scale'; mean_value:刪掉,因?yàn)榫W(wǎng)絡(luò)沒有均值項(xiàng); scale_value:尺度為1.0 / 255,因此設(shè)置為0.003921568627451。
最終,我們的yaml文件內(nèi)容如下所示:
model_parameters: prototxt: '../../../01_common/model_zoo/mapper/detection/yolov3_darknet53/yolov3_transposed.prototxt' caffe_model: '../../../01_common/model_zoo/mapper/detection/yolov3_darknet53/yolov3.caffemodel' output_model_file_prefix: 'yolov3_selfyaml' march: 'bernoulli2' input_parameters: input_type_train: 'rgb' input_layout_train: 'NCHW' input_type_rt: 'nv12' norm_type: 'data_scale' scale_value: 0.003921568627451 input_layout_rt: 'NHWC' calibration_parameters: cal_data_dir: './calibration_data' calibration_type: 'max' max_percentile: 0.9999 compiler_parameters: compile_mode: 'latency' optimize_level: 'O3' debug: False
之后,用我們親手準(zhǔn)備的校準(zhǔn)數(shù)據(jù)和配置的輕量yaml進(jìn)行模型轉(zhuǎn)換,在控制臺(tái)輸入指令hb_mapper makertbin --config yolov3_simple.yaml --model-type caffe。
模型推理
在官方給的demo中,04_inference.sh可以直接調(diào)用執(zhí)行好的模型進(jìn)行推理,但是為了我覺得這種方案對(duì)于未來要如何部署自己的模型是無意義的。因此我閱讀了官方推理的demo之后,自己寫個(gè)完整的推理過程。模型推理流程主要可以分為以下三個(gè)步驟:
①數(shù)據(jù)預(yù)處理,生成推理所需數(shù)據(jù);
②利用處理好的數(shù)據(jù)進(jìn)行模型推理,得到輸出;
③將輸出轉(zhuǎn)換成最終數(shù)據(jù),也就是后處理過程。
(PS.使用的測(cè)試圖像路徑為/open_explorer/ddk/samples/ai_toolchain/horizon_model_convert_sample/01_common/test_data/det_images/kite.jpg)
在上一節(jié)中,模型轉(zhuǎn)換后有三個(gè)關(guān)鍵文件:
yolov3_selfyaml_original_float_model.onnx:圖像量化前的模型; yolov3_selfyaml_quantized_model.onnx:圖像量化后的模型; yolov3_selfyaml.bin:在BPU上用于推理的模型文件,輸出結(jié)果與yolov3_selfyaml_quantized_model.onnx一致。
下面將給出推理一張圖像的相關(guān)代碼,其中我把圖像格式轉(zhuǎn)換,以及yolo后處理的細(xì)節(jié)封裝在一個(gè)包里,相關(guān)的代碼已經(jīng)放在社區(qū)里供大家參考。
以下是inference_model.py的代碼細(xì)節(jié),在每個(gè)關(guān)鍵過程中都給出了相關(guān)的注釋:
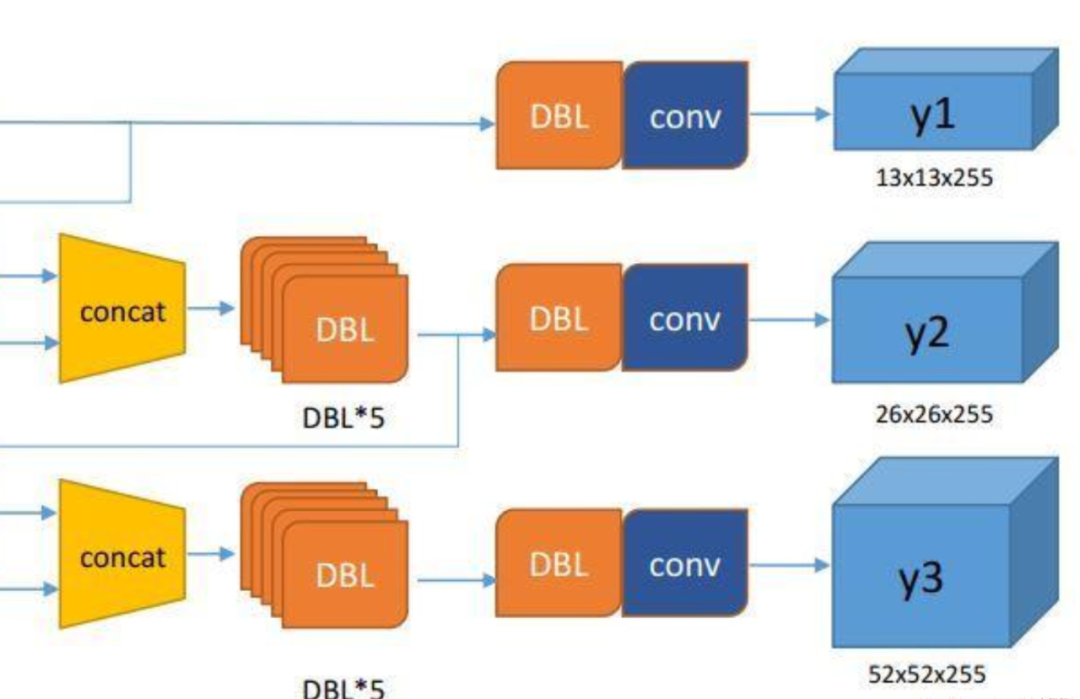
從代碼可以獲知模型會(huì)輸出三層,每層的維度為(1, 13, 13, 255) (1, 26, 26, 255) (1, 52, 52, 255),對(duì)著下圖,可以很容易對(duì)應(yīng)的是網(wǎng)絡(luò)的哪一層。
import numpy as np import cv2 import os from horizon_tc_ui import HB_ONNXRuntime from bputools.format_convert import imequalresize, bgr2nv12_opencv, nv122yuv444 from bputools.yolo_postproc import modelout2predbbox, recover_boxes, nms, draw_bboxs modelpath_prefix = '/open_explorer/ddk/samples/ai_toolchain/horizon_model_convert_sample' # img_path 圖像完整路徑 img_path = os.path.join(modelpath_prefix, '01_common/test_data/det_images/kite.jpg') # model_path 量化模型完整路徑 model_root = os.path.join(modelpath_prefix, '04_detection/02_yolov3_darknet53/mapper/model_output') model_path = os.path.join(model_root, 'yolov3_selfyaml_quantized_model.onnx') # 1. 加載模型,獲取所需輸出HW sess = HB_ONNXRuntime(model_file=model_path) sess.set_dim_param(0, 0, '?') model_h, model_w = sess.get_hw() # 2 加載圖像,根據(jù)前面模型,轉(zhuǎn)換后的模型是以NV12作為輸入的 # 但在OE驗(yàn)證的時(shí)候,需要將圖像再由NV12轉(zhuǎn)為YUV444 imgOri = cv2.imread(img_path) img = imequalresize(imgOri, (model_w, model_h)) nv12 = bgr2nv12_opencv(img) yuv444 = nv122yuv444(nv12, [model_w, model_h]) # 3 模型推理 input_name = sess.input_names[0] output_name = sess.output_names output = sess.run(output_name, {input_name: np.array([yuv444])}, input_offset=128) print(output_name) print(output[0].shape, output[1].shape, output[2].shape) # ['layer82-conv-transposed', 'layer94-conv-transposed', 'layer106-conv-transposed'] # (1, 13, 13, 255) (1, 26, 26, 255) (1, 52, 52, 255) # 4 檢測(cè)結(jié)果后處理 # 由output恢復(fù)416*416模式下的目標(biāo)框 pred_bbox = modelout2predbbox(output) # 將目標(biāo)框恢復(fù)到原始分辨率 bboxes = recover_boxes(pred_bbox, (imgOri.shape[0], imgOri.shape[1]), input_shape=(model_h, model_w), score_threshold=0.3) # 對(duì)檢測(cè)出的框進(jìn)行非極大值抑制,抑制后得到的框就是最終檢測(cè)框 nms_bboxes = nms(bboxes, 0.45) print("detected item num: {0}".format(len(nms_bboxes))) # 繪制檢測(cè)框 draw_bboxs(imgOri, nms_bboxes) cv2.imwrite('detected.png', imgOri)
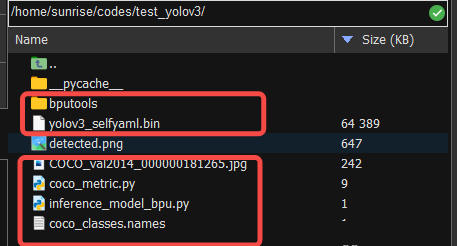
上板運(yùn)行
我們將下圖所示的一些文件拖到旭日X3派開發(fā)板中,注意inference_model_bpu.py跟docker中是有微小的改動(dòng)的。
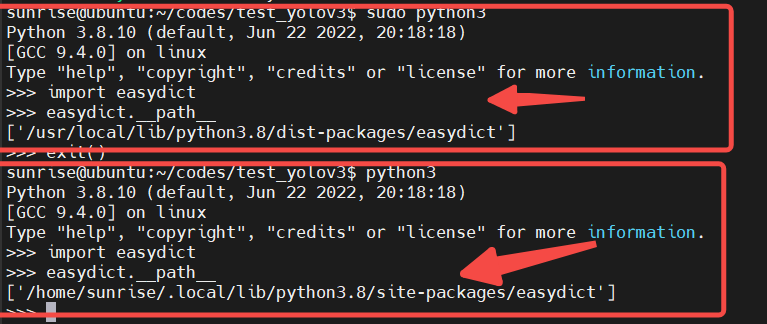
注意,在執(zhí)行前要安裝一些包sudo pip3 install EasyDict pycocotools,切記要加sudo,這樣安裝的路徑不是用戶目錄,在運(yùn)行BPU模型時(shí)候,也是必須要加sudo的。
inference_model_bpu.py的源碼如下所示,與在docker中不同,nv12不需要再轉(zhuǎn)為yuv444了,模型的運(yùn)行也有一些差別,而后處理幾乎沒有變化。
import numpy as np import cv2 import os from hobot_dnn import pyeasy_dnn as dnn from bputools.format_convert import imequalresize, bgr2nv12_opencv, nv122yuv444 from bputools.yolo_postproc import modelout2predbbox, recover_boxes, nms, draw_bboxs def get_hw(pro): if pro.layout == "NCHW": return pro.shape[2], pro.shape[3] else: return pro.shape[1], pro.shape[2] modelpath_prefix = '' # img_path 圖像完整路徑 img_path = 'COCO_val2014_000000181265.jpg' # model_path 量化模型完整路徑 model_path = 'yolov3_selfyaml.bin' # 1. 加載模型,獲取所需輸出HW models = dnn.load(model_path) model_h, model_w = get_hw(models[0].inputs[0].properties) # 2 加載圖像,根據(jù)前面模型,轉(zhuǎn)換后的模型是以NV12作為輸入的 # 但在OE驗(yàn)證的時(shí)候,需要將圖像再由NV12轉(zhuǎn)為YUV444 imgOri = cv2.imread(img_path) img = imequalresize(imgOri, (model_w, model_h)) nv12 = bgr2nv12_opencv(img) # 3 模型推理 t1 = cv2.getTickCount() outputs = models[0].forward(nv12) t2 = cv2.getTickCount() outputs = (outputs[0].buffer, outputs[1].buffer, outputs[2].buffer) print(outputs[0].shape, outputs[1].shape, outputs[2].shape) # (1, 13, 13, 255) (1, 26, 26, 255) (1, 52, 52, 255) print('time consumption {0} ms'.format((t2-t1)*1000/cv2.getTickFrequency())) # 4 檢測(cè)結(jié)果后處理 # 由output恢復(fù)416*416模式下的目標(biāo)框 pred_bbox = modelout2predbbox(outputs) # 將目標(biāo)框恢復(fù)到原始分辨率 bboxes = recover_boxes(pred_bbox, (imgOri.shape[0], imgOri.shape[1]), input_shape=(model_h, model_w), score_threshold=0.3) # 對(duì)檢測(cè)出的框進(jìn)行非極大值抑制,抑制后得到的框就是最終檢測(cè)框 nms_bboxes = nms(bboxes, 0.45) print("detected item num: {0}".format(len(nms_bboxes))) # 繪制檢測(cè)框 draw_bboxs(imgOri, nms_bboxes) cv2.imwrite('detected.png', imgOri)
手部關(guān)鍵點(diǎn)檢測(cè)網(wǎng)絡(luò)
手部關(guān)鍵點(diǎn)檢測(cè)是做手勢(shì)識(shí)別的一個(gè)關(guān)鍵過程,該代碼基于Caffe,而且無自定義層,因此作為個(gè)引子,帶領(lǐng)各位先初步使用BPU。
模型準(zhǔn)備
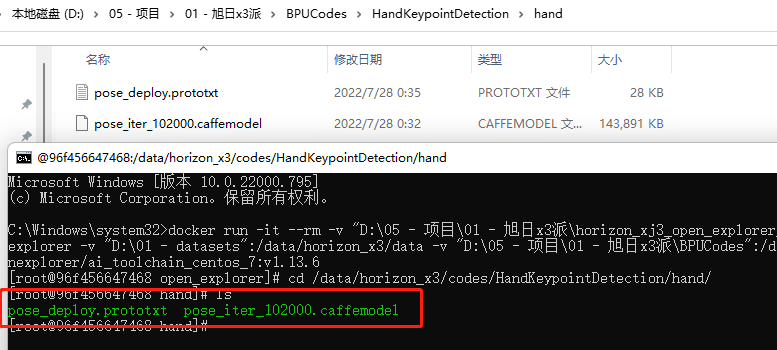
在前期安裝準(zhǔn)備中,我們掛載了一個(gè)目錄-v "D:\05 - 項(xiàng)目\01 - 旭日x3派\BPUCodes":/data/horizon_x3/codes,下載好代碼后,按照如下方式放置相關(guān)文件,此時(shí)可以發(fā)現(xiàn)docker中也有這些文件。
驗(yàn)證模型
驗(yàn)證前,先將docker根目錄切換到模型根目錄下cd /data/horizon_x3/codes/HandKeypointDetection/hand/。模型驗(yàn)證需要利用hb_mapper checker后面跟一堆參數(shù)來對(duì)模型進(jìn)行配置。下面帶各位來配置這些參數(shù):
--model-type:我們這些模型是Caffe,所以填caffe
--march:旭日3派只能填bernoulli2
--proto:填prototxt文件名,即pose_deploy.prototxt
--model:填caffemodel文件名,即pose_iter_102000.caffemodel
--input-shape:打開prototxt文件,查找input屬性,可以發(fā)現(xiàn)模型只有一個(gè)輸入,輸入層的名稱為image,輸入圖像的維度大小為1x3x368x368,那么這個(gè)參數(shù)設(shè)置就寫為image 1x3x368x368。

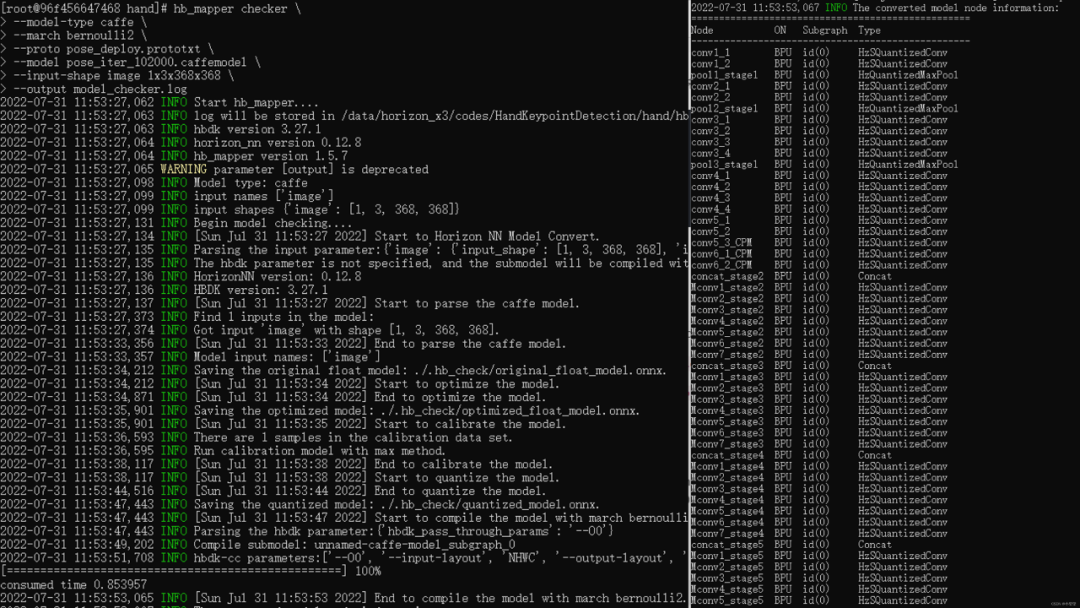
綜上所述,在docker中需要輸入如下指令來完成模型驗(yàn)證過程:
hb_mapper checker \ --model-type caffe \ --march bernoulli2 \ --proto pose_deploy.prototxt \ --model pose_iter_102000.caffemodel \ --input-shape image 1x3x368x368
輸出結(jié)果如下所示,可以看到整個(gè)流程的轉(zhuǎn)換狀態(tài)以及每個(gè)節(jié)點(diǎn)是在BPU還是CPU上運(yùn)行的。整個(gè)控制臺(tái)的運(yùn)行結(jié)果默認(rèn)存在根目錄的hb_mapper_checker.log中。
轉(zhuǎn)換模型
與前面流程不同,這里先配置yaml文件,再準(zhǔn)備校準(zhǔn)數(shù)據(jù)。
(1)配置yaml文件
模型參數(shù)組參數(shù)model_parameters配置:
output_model_file_prefix:給轉(zhuǎn)換后的模型起個(gè)名,這里叫做'handkpdet'(hand keypoint detection);
prototxt:caffe的prototxt,這里為'pose_deploy.prototxt';
caffe_model:caffe的模型文件,這里為'pose_iter_102000.caffemodel'
onnx_model:刪掉。因?yàn)槲覀冇玫氖荂affe。
輸入信息組參數(shù)配置input_parameters:
input_type_train:原始浮點(diǎn)模型的輸入數(shù)據(jù)格式,支持多種圖像格式。我們這個(gè)模型,輸入的是彩色圖,考慮到opencv加載圖像默認(rèn)是BGR通道,因此這里設(shè)置為'bgr';
input_layout_train:從前文的prototxt可以看出,數(shù)據(jù)輸入排布為'NCHW';
input_type_rt:模型轉(zhuǎn)換后,我們期望輸入的圖像格式。我們?cè)谟?xùn)練模型和部署模型的時(shí)候,圖像輸入格式是可以變的,NV12是一些相機(jī)返回的原始數(shù)據(jù)格式,考慮到我們測(cè)試仍然基于本地圖像,因此這里仍然設(shè)置為'bgr';
norm_type:網(wǎng)絡(luò)不可能拿原始圖像數(shù)據(jù)作為輸入的,一般都要進(jìn)行一個(gè)歸一化操作。這里用的模型對(duì)應(yīng)的歸一化代碼為inpBlob = cv2.dnn.blobFromImage(frame, 1.0 / 255, (inWidth, inHeight), (0, 0, 0), swapRB=False, crop=False),無減均值項(xiàng),只有尺度項(xiàng)。因此,該屬性設(shè)置為'data_scale';
mean_value:刪掉,因?yàn)榫W(wǎng)絡(luò)沒有均值項(xiàng);
scale_value:尺度為1.0 / 255,因此設(shè)置為'0.0039'。
最終,我們的yaml文件handpoint.yaml內(nèi)容為:
model_parameters: prototxt: 'pose_deploy.prototxt' caffe_model: 'pose_iter_102000.caffemodel' output_model_file_prefix: 'handkpdet' march: 'bernoulli2' input_parameters: input_type_train: 'bgr' input_layout_train: 'NCHW' input_type_rt: 'bgr' norm_type: 'data_scale' scale_value: '0.0039' input_layout_rt: 'NHWC' calibration_parameters: cal_data_dir: './calibration_data' calibration_type: 'max' max_percentile: 0.9999 compiler_parameters: compile_mode: 'latency' optimize_level: 'O3' debug: False
(2)準(zhǔn)備校準(zhǔn)數(shù)據(jù)
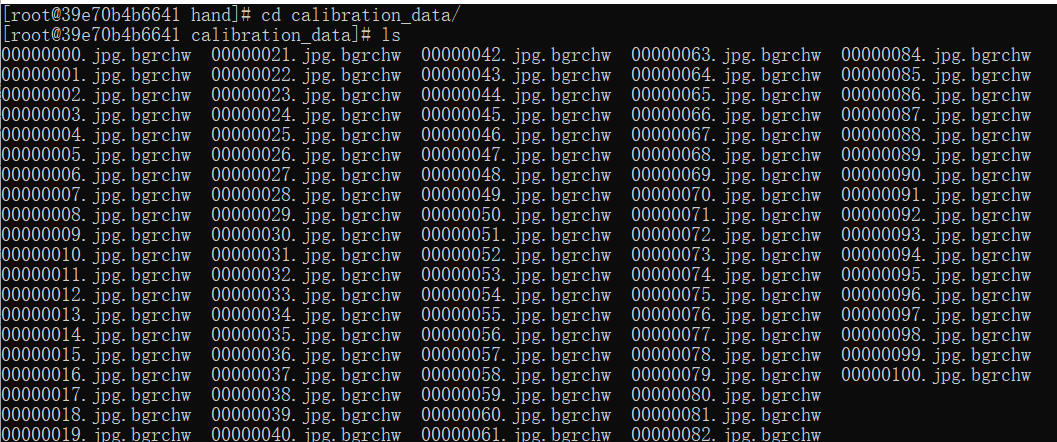
考慮到這個(gè)模型的輸入只有一個(gè),因此,準(zhǔn)備校準(zhǔn)數(shù)據(jù)部分的代碼可以參考上一節(jié)的內(nèi)容,需要修改的只有兩個(gè)地方,原始數(shù)據(jù)地址,和顏色轉(zhuǎn)換部分(取消了BGR轉(zhuǎn)RGB的過程),數(shù)據(jù)集用的是FreiHAND_pub_v2_eval.zip。

docker中,校準(zhǔn)數(shù)據(jù)形式如下圖所示,共計(jì)100張。
(3)開始轉(zhuǎn)換
數(shù)據(jù)準(zhǔn)備就緒,輸入命令hb_mapper makertbin --config handpoint.yaml --model-type caffe開始轉(zhuǎn)換我們的模型!等待一段時(shí)間之后,模型轉(zhuǎn)換成功,從結(jié)果可以看出來,模型的損失并不是很高!!感覺有戲,(☆▽☆)。
模型推理
由于該模型與前面的模型相似,都是以一張圖像作為輸入的,因此自己要補(bǔ)充的工作主要有兩點(diǎn):
- 完成圖像預(yù)處理部分。前面的yaml文件指明了,量化后的模型是以BGR、NHWC格式作為輸入的。因此,只需要調(diào)用resize成目標(biāo)模型大小就行,opencv加載圖像時(shí)候默認(rèn)是HWC格式。
- 完成圖像后處理部分。圖像后處理一般與推理平臺(tái)沒有太大的關(guān)系,完整的流程都會(huì)有這個(gè)過程。
在docker中推理的完整代碼如下所示:
import numpy as np import cv2 import os from horizon_tc_ui import HB_ONNXRuntime import copy # img_path 圖像完整路徑 img_path = '/data/horizon_x3/codes/HandKeypointDetection/hand/FreiHAND_pub_v2_eval/evaluation/rgb/00000253.jpg' # model_path 量化模型完整路徑 model_path = '/data/horizon_x3/codes/HandKeypointDetection/hand/model_output/handkpdet_quantized_model.onnx' # 1. 加載模型,獲取所需輸出HW sess = HB_ONNXRuntime(model_file=model_path) sess.set_dim_param(0, 0, '?') model_h, model_w = sess.get_hw() # 2 加載圖像,根據(jù)前面yaml,量化后的模型以BGR NHWC形式輸入 imgOri = cv2.imread(img_path) img = cv2.resize(imgOri, (model_w, model_h)) # 3 模型推理 input_name = sess.input_names[0] output_name = sess.output_names output = sess.run(output_name, {input_name: np.array([img])}, input_offset=128) print(output_name) print(output[0].shape) # ['net_output'] # (1, 22, 46, 46) # 4 檢測(cè)結(jié)果后處理 # 繪制關(guān)鍵點(diǎn) nPoints = 22 threshold = 0.1 POSE_PAIRS = [[0, 1], [1, 2], [2, 3], [3, 4], [0, 5], [5, 6], [6, 7], [7, 8], [0, 9], [9, 10], [10, 11], [11, 12], [0, 13], [13, 14], [14, 15], [15, 16], [0, 17], [17, 18], [18, 19], [19, 20]] imgh, imgw = imgOri.shape[:2] points = [] imgkp = copy.deepcopy(imgOri) for i in range(nPoints): probMap = output[0][0, i, :, :] probMap = cv2.resize(probMap, (imgw, imgh)) minVal, prob, minLoc, point = cv2.minMaxLoc(probMap) if prob > threshold: cv2.circle(imgkp, (int(point[0]), int(point[1])), 8, (0, 255, 255), thickness=-1, lineType=cv2.FILLED) cv2.putText(imgkp, "{}".format(i), (int(point[0]), int(point[1])), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2, lineType=cv2.LINE_AA) points.append((int(point[0]), int(point[1]))) else: points.append(None) # 繪制骨架 imgskeleton = copy.deepcopy(imgOri) for pair in POSE_PAIRS: partA = pair[0] partB = pair[1] if points[partA] and points[partB]: cv2.line(imgskeleton, points[partA], points[partB], (0, 255, 255), 2) cv2.circle(imgskeleton, points[partA], 8, (0, 0, 255), thickness=-1, lineType=cv2.FILLED) cv2.circle(imgskeleton, points[partB], 8, (0, 0, 255), thickness=-1, lineType=cv2.FILLED) # 保存關(guān)鍵點(diǎn)和骨架圖 cv2.imwrite('handkeypoint.png', imgkp) cv2.imwrite('imgskeleton.png', imgskeleton)
上板運(yùn)行
在開發(fā)板運(yùn)行的程序與上述推理代碼差異不大,注意好模型的輸入數(shù)據(jù)格式即可,這里要注意,輸出的outputs與docker中有差異,要做output = (outputs[0].buffer,)轉(zhuǎn)換,這樣可以直接兼容后面的后處理部分,進(jìn)而生成結(jié)果圖。
import numpy as np import cv2 import os from hobot_dnn import pyeasy_dnn as dnn import copy def get_hw(pro): if pro.layout == "NCHW": return pro.shape[2], pro.shape[3] else: return pro.shape[1], pro.shape[2] # img_path 圖像完整路徑 img_path = '20220806023323.jpg' # model_path 量化模型完整路徑 model_path = 'handkpdet.bin' # 1. 加載模型,獲取所需輸出HW models = dnn.load(model_path) model_h, model_w = get_hw(models[0].inputs[0].properties) # 2 加載圖像,根據(jù)前面yaml,量化后的模型以BGR NHWC形式輸入 imgOri = cv2.imread(img_path) img = cv2.resize(imgOri, (model_w, model_h)) # 3 模型推理 t1 = cv2.getTickCount() outputs = models[0].forward(img) t2 = cv2.getTickCount() output = (outputs[0].buffer,) print(outputs[0].buffer.shape) # (1, 22, 46, 46) print('time consumption {0} ms'.format((t2-t1)*1000/cv2.getTickFrequency())) # 4 檢測(cè)結(jié)果后處理 # 繪制關(guān)鍵點(diǎn) nPoints = 22 threshold = 0.1 POSE_PAIRS = [[0, 1], [1, 2], [2, 3], [3, 4], [0, 5], [5, 6], [6, 7], [7, 8], [0, 9], [9, 10], [10, 11], [11, 12], [0, 13], [13, 14], [14, 15], [15, 16], [0, 17], [17, 18], [18, 19], [19, 20]] imgh, imgw = imgOri.shape[:2] points = [] imgkp = copy.deepcopy(imgOri) for i in range(nPoints): probMap = output[0][0, i, :, :] probMap = cv2.resize(probMap, (imgw, imgh)) minVal, prob, minLoc, point = cv2.minMaxLoc(probMap) if prob > threshold: cv2.circle(imgkp, (int(point[0]), int(point[1])), 8, (0, 255, 255), thickness=-1, lineType=cv2.FILLED) cv2.putText(imgkp, "{}".format(i), (int(point[0]), int(point[1])), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2, lineType=cv2.LINE_AA) points.append((int(point[0]), int(point[1]))) else: points.append(None) # 繪制骨架 imgskeleton = copy.deepcopy(imgOri) for pair in POSE_PAIRS: partA = pair[0] partB = pair[1] if points[partA] and points[partB]: cv2.line(imgskeleton, points[partA], points[partB], (0, 255, 255), 2) cv2.circle(imgskeleton, points[partA], 8, (0, 0, 255), thickness=-1, lineType=cv2.FILLED) cv2.circle(imgskeleton, points[partB], 8, (0, 0, 255), thickness=-1, lineType=cv2.FILLED) # 保存關(guān)鍵點(diǎn)和骨架圖 cv2.imwrite('handkeypoint.png', imgkp) cv2.imwrite('imgskeleton.png', imgskeleton)
我自己拍了兩張圖進(jìn)行測(cè)試,第一排是晚上拍的,手指頭有點(diǎn)串味哈哈,整體檢測(cè)耗時(shí)在480ms左右,網(wǎng)絡(luò)深度沒有yolo高,也許是橫向的特征比較多。

原作者:小璽璽
原鏈接:本文轉(zhuǎn)自地平線開發(fā)者社區(qū)
-
模型
+關(guān)注
關(guān)注
1文章
3313瀏覽量
49231 -
BPU
+關(guān)注
關(guān)注
0文章
4瀏覽量
1970
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
摩爾線程宣布成功部署DeepSeek蒸餾模型推理服務(wù)
云服務(wù)器 Flexus X 實(shí)例:RAG 開源項(xiàng)目 FastGPT 部署,玩轉(zhuǎn)大模型

基于 Flexus 云服務(wù)器 X 實(shí)例體驗(yàn)大模型部署體驗(yàn)測(cè)評(píng)

Flexus X 實(shí)例 ultralytics 模型 yolov10 深度學(xué)習(xí) AI 部署與應(yīng)用

企業(yè)AI模型部署攻略
AI模型部署邊緣設(shè)備的奇妙之旅:目標(biāo)檢測(cè)模型

用Ollama輕松搞定Llama 3.2 Vision模型本地部署
AI模型部署和管理的關(guān)系
企業(yè)AI模型部署怎么做
使用TVM量化部署模型報(bào)錯(cuò)NameError: name \'GenerateESPConstants\' is not defined如何解決?
【AIBOX上手指南】快速部署Llama3

大模型端側(cè)部署加速,都有哪些芯片可支持?
使用CUBEAI部署tflite模型到STM32F0中,模型創(chuàng)建失敗怎么解決?
源2.0適配FastChat框架,企業(yè)快速本地化部署大模型對(duì)話平臺(tái)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論