 阿克曼移動機器人底盤優勢介紹
阿克曼移動機器人底盤優勢介紹
一 . 阿克曼結構前世今生
阿克曼轉向動力學:
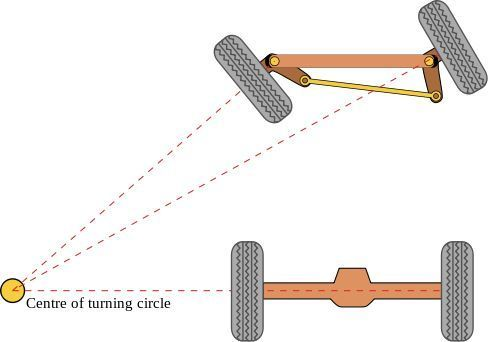 阿克曼轉向
阿克曼轉向阿克曼結構最早源于汽車應用,是汽車轉向的一種實現方法,在汽車轉彎的時候,內外輪轉過的角度不一樣,內側輪胎轉彎半徑小于外側輪胎。這種轉向方式最初是由的德國馬車工程師的Georg Lankensperger 1817年提出,他的代理商Rudolph Ackerman于1818年在英國申請專利,所以從今往后這個轉向原理就叫阿克曼轉向結構了。
但是早在他好幾十年之前,就有一個叫Erasmus Darwin的人提出了這個想法。
這個Erasmus Darwin是大名鼎鼎進化論的奠基人Charles Darwin的親爺爺,是英國歷史上的一個傳奇人物,集醫學家、詩人、發明家、植物學家、生理學家等等各種家于一身,被譽為Midlands郡的達芬奇。
 所有的創新都是基于厚重的沉淀,連達爾文也不例外
所有的創新都是基于厚重的沉淀,連達爾文也不例外在經過劍橋和愛丁堡學習了6年以后,25歲的Darwin開始再伯明翰偏北一點的Lichfiled地區行醫,精湛的醫術讓他名聲大振(連英國國王喬治三世都曾延攬他當宮廷醫生,被他給直接拒絕了),詩人、發明家、各種家的多重身份讓他成為了伯明翰啟蒙運動“滿月會”(The Lunar Society of Birmingham)的核心人物,他們滿月會朋友圈里還有一位叫James Watt, 你沒有猜錯,就是那個改良蒸汽機并引領了工業革命的瓦特。
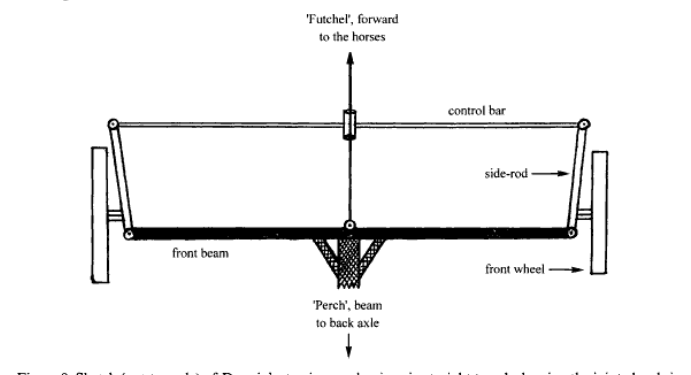
我們的一代名醫達爾文先生當然是使用馬車行駛在救死扶傷的路上,就是類似于下圖這種:
 老式阿克曼結構
老式阿克曼結構每年一萬多英里的行程讓他很快發現了這種馬車的轉向方式問題:
(1) 因為要繞著中間一根單一的軸轉彎,前輪不能做大,這樣在路上碰到石頭或其它障礙的時候前輪就容易被抬起來
(2) 因為兩個前輪是平行的,轉彎過頭的時候容易出現四個輪子在同一個平面內構成一個三角形的情況,這種情況車子是最“穩定”的,根本就會卡死不動。
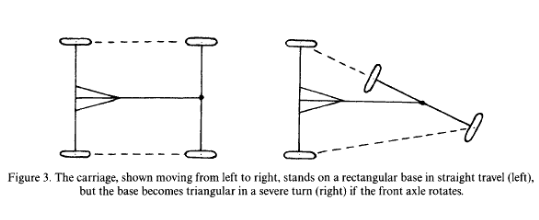 傳統單軸轉彎結構
傳統單軸轉彎結構于是我們發明家達爾文先生就開始想辦法對他的馬車進行了改造,之后,車輛試驗認證工程師又開始默默地進行道路試驗起來。直到1766年,在他寫給一個朋友的信中才寫到他已經自己改造了兩輛馬車,進行了三年為期10,000英里的道路試驗。
再后來到1767年,瓦特和達爾文相見如故,這兩個蒸汽機的狂熱愛好者相互交流了他們對蒸汽機的看法(那個時候蒸汽機還沒有用于工程領域),瓦特的想法是要將蒸汽機用于工業生產,達爾文則想用它取代馬作為車的動力源(有一個原始汽車的概念設計)。
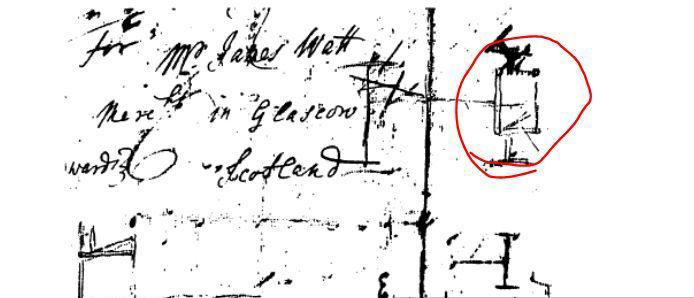
達爾文最初在寫給瓦特的信里面介紹了他的蒸汽車的概念設計,下面這幅圖達爾文是當時想闡述他的底盤設計的,但從這張圖我們可以看到連桿轉向機構的原始雛形:
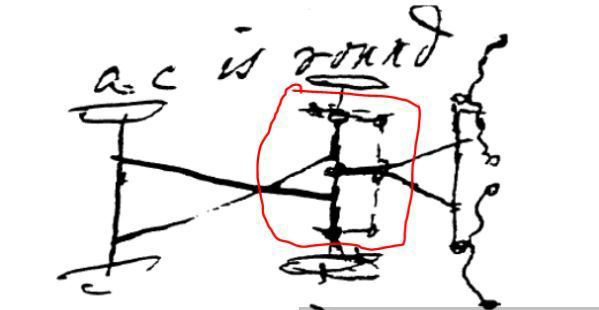
在瓦特收到這封信號可以看到在信封上,瓦特又把這個結構確認為一個矩形結構。
最后我們可以看到梯形四連桿機構是達爾文1768年與另外一個朋友的書信來往:
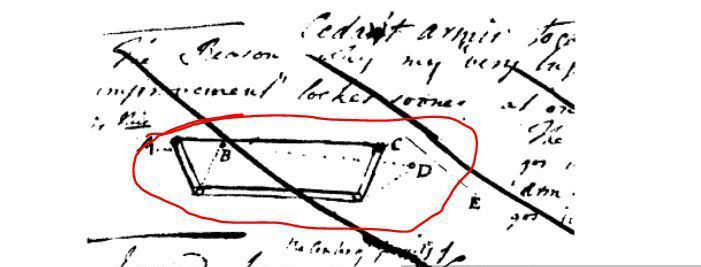
 阿克曼轉向機構雛形
阿克曼轉向機構雛形阿克曼轉向機構雛形
在這種結構中,這個實現基本與現代汽車上的轉向機構區別不大了,雖然理論上實現了輪轉向,但此后的近百年時間里,四輪馬車仍舊采用軸轉向的模式,最大的問題就是以當時的工業水平,實現輪轉向的加工實在太難了,優勢并不明顯。真正讓阿克曼轉向發揚光大的還是汽車誕生。
我們看Benz的原型車: 一個簡單的三輪車,我們可以大膽的猜想,當時CarBenz無法解決四輪車輛前輪轉向這一難題,才臨時采用了三輪車的形式。

從第二輛車開始,Benz再也沒有采用過三輪模式,我們權且認為CarBenz解決掉了上述的問題,從此汽車產業一飛沖天。

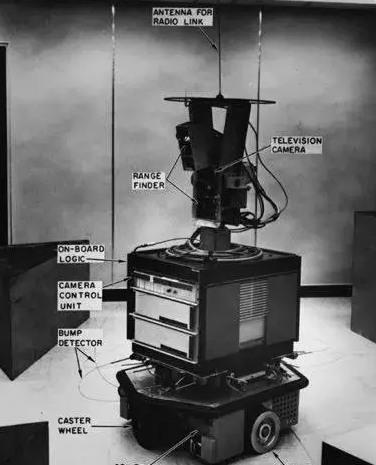
二. 阿克曼結構在移動機器人上應用移動機器人前期更多是采用兩輪差動結構形式,從1956由查理·羅森(Charlie Rosen)領導的美國斯坦福研究所至今,直到2013年國內外大部分機器人行業應用研究與行業量化使用還是1956年的輪差動方案 。出現了250年前達爾文遇見的類似問題 ,通過性差 ,無法進行大載重負載室外運行 ,在應用中受場景限制。并且后期維護與更新頻次高 。造成兩輪差動方案在移動機器人應用中無法大規模量化 ,只在室內物流與作業場景有應用,無法在室內外全場景中實現應用 。
2013年四位移動機器人的狂熱愛好者相互交流了他們對移動機器人的看法后成立了YUHESEN科技 (那個時候移動機器人還沒有大規模應用 ),他們在思考如何能使智能移動機器人全面用于多場景工業生產,李雷達則想到使用阿克曼結構首先將移動機器人應用規模化達到全場景使用的技術方案(有一個原始阿克曼機器人的概念設計)。于是四位狂熱愛好者就開始想辦法對兩輪差動方式機器人進行了改造,之后,又開始默默地進行道路試驗起來。直到2016年,進行了三年為期10,000公里的道路試驗。隨即掀開了阿克曼結構移動機器人應用的大幕 ,伴隨后續京東 ,阿里,美團,菜鳥等行業訂單采購阿克曼移動機器人應用技術的推廣,現在阿克曼技術已經全面量化 。行業數據顯示作為移動機器人底盤 top 1企業的 YUHESEN 基本上在以每年350-400% 的應用增長 。行業內其他跟隨企業的成長也在100% 以上 。

三 . 阿克曼移動機器人優勢
輪式阿克曼轉向機器人底盤應用于鋪裝道路場景中600kg內大負載配送 ,園區保安,智慧清潔,智能出行等場景機器人應用 。結構為通過后輪差數橋進行驅動,通過前輪控制方向實現前進、后退、半徑轉向功能 。 具有大負載背負,控制精度高等優勢,是物流 ,安防,清掃 ,與老人出行輔助機器人應用的標準配置機器人底盤 。
 YUHESEN阿克曼移動機器人底盤平臺
YUHESEN阿克曼移動機器人底盤平臺 -
輪式移動機器人
+關注
關注
0文章
3瀏覽量
1975
發布評論請先 登錄
相關推薦
移動機器人核心科技解碼:導航、感知與掌控力的深度剖析
思嵐科技榮獲雙年度移動機器人優質供應鏈獎
移動機器人的技術突破和未來展望

智能移動機器人系統方案指南

新松移動機器人批量進軍歐洲新能源市場
智能移動機器人

如何借助恩智浦MCX系列MCU糾錯功能,打造可靠安全的移動機器人?

智能移動機器人系統的用途和市場趨勢
羅克韋爾自動化與英偉達深化合作,加速開工業AI移動機器人
移動機器人四大賦能技術及NXP解決方案,本文總結全了!
海康機器人第100000臺移動機器人下線
機械臂和移動機器人兩種控制系統方案對比

自主移動機器人(AMR)功能和特點

移動機器人幕后的全能冠軍——MRC5000






 工商網監
工商網監
評論