") 斗輪機無人值守控制系統(tǒng)之斗輪機安全防護系統(tǒng)
斗輪機無人值守控制系統(tǒng)之斗輪機安全防護系統(tǒng)
斗輪機是燃煤發(fā)電廠重要的大型設(shè)備之一,擔(dān)負著電廠堆取煤的任務(wù),但在作業(yè)時,受斗輪機結(jié)構(gòu)、位置及運行方式的影響,加之駕駛室操作人員受視角、距離等因素的影響,易出現(xiàn)聽不清話語,理解誤差情況,導(dǎo)致操作人員與運維人員配合不當(dāng),啟停皮帶時間錯亂、不合拍,這時就有可能會誤傷正在皮帶、機架或是輪斗上的工作人員,產(chǎn)生的危害性極大。
 XKCON祥控斗輪機無人值守控制系統(tǒng)
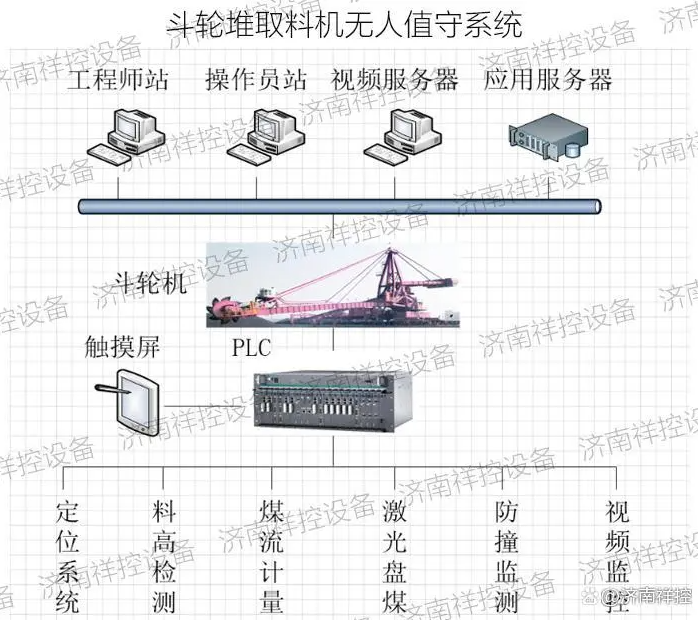
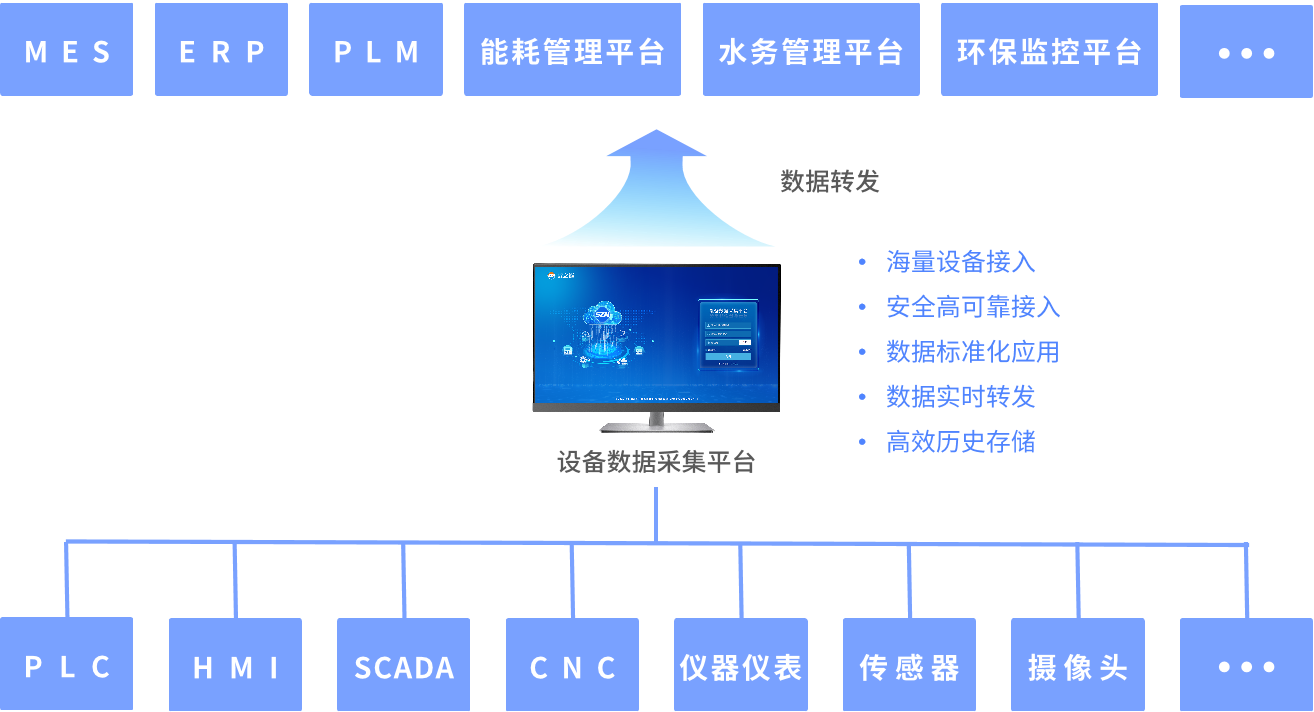
XKCON祥控斗輪機無人值守控制系統(tǒng)XKCON祥控斗輪機無人值守控制系統(tǒng)融合了空間精確定位、智能激光測量、紅外測溫、智能控制、數(shù)字建模和快速激光掃描等多種技術(shù),通過安裝精準定位裝置、姿態(tài)傳感器和斗輪機操控轉(zhuǎn)換器等,將設(shè)備狀態(tài)與煤場參數(shù)實時傳送至上位控制系統(tǒng),對斗輪位置和煤堆形狀進行精準檢測、數(shù)據(jù)運算、分析、判斷,實現(xiàn)斗輪堆取料機對堆取煤、尋跡、流量、運行模式的全自動控制。
XKCON祥控斗輪機全自動無人值守系統(tǒng)在斗輪機安全運行方面,通過安裝超聲波距離傳感器、安全避障激光掃描儀等檢測設(shè)備構(gòu)建了斗輪機安全防護系統(tǒng),對斗輪機設(shè)置了四重安全防護控制:
1.軟急停安全防護:在輸煤程控室的上位機畫面應(yīng)設(shè)置急停按鈕。
2.硬急停安全防護:從輸煤樓斗輪機高壓配電柜至輸煤程控室鋪設(shè)控制電纜,在輸煤程控室的操作臺上設(shè)置急停按鈕。
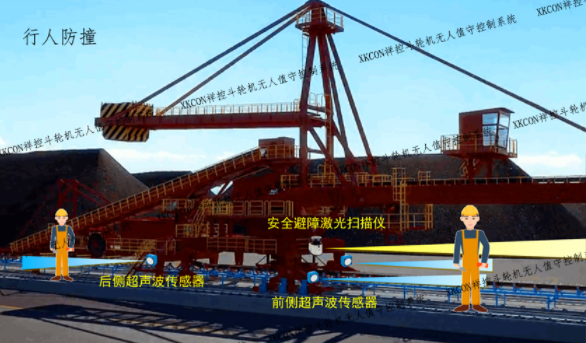 行人防撞
行人防撞3.行人防撞:在斗輪機行走軌道前后兩側(cè)分別安裝超聲波傳感器,用于實現(xiàn)斗輪機行走過程中前后距離的測量,防止發(fā)生人員或者設(shè)備的碰撞,超聲波傳感器信號接入斗輪機綜合控制系統(tǒng),實現(xiàn)堆取料機整體的聯(lián)鎖保護。
4.懸臂防撞:在斗輪機懸臂兩側(cè)分別安裝超聲波障礙物檢測裝置,同時根據(jù)實時建立的煤垛模型與斗輪機懸臂實時空間位置,系統(tǒng)實時計算兩者相對位置關(guān)系,當(dāng)位置達到設(shè)定值時上位機進行預(yù)警,當(dāng)達到極限值時自動停止旋轉(zhuǎn)并提供報警信息,人工確認排除后自動恢復(fù)旋轉(zhuǎn),實現(xiàn)懸臂軟硬雙重防護。
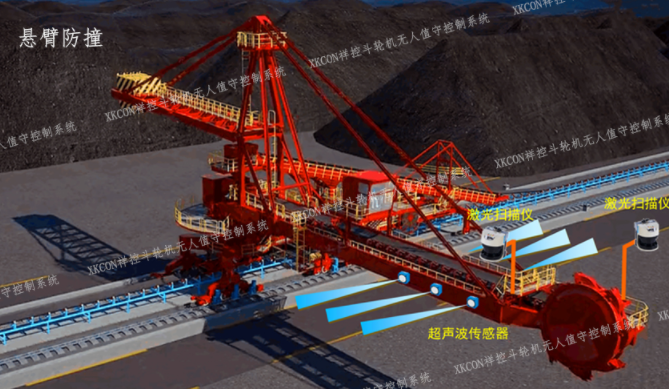 懸臂防撞
懸臂防撞開始作業(yè)后,XKCON祥控斗輪機全自動無人值守系統(tǒng)不再需要手動操作,全流程全自動控制,實現(xiàn)一鍵斗輪機啟停,增強了斗輪機運行的安全性。
-
傳感器
+關(guān)注
關(guān)注
2553文章
51407瀏覽量
756636 -
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6661瀏覽量
110889 -
系統(tǒng)
+關(guān)注
關(guān)注
1文章
1019瀏覽量
21431
發(fā)布評論請先 登錄
相關(guān)推薦
汽輪機故障診斷及解決方案
汽輪機與煤氣輪機的區(qū)別
汽輪機選型指南
汽輪機工作原理解析

最有效的云服務(wù)器網(wǎng)絡(luò)安全防護措施
無人叉車的安全性能如何保證?有哪些防護機制?
閘門遠程控制系統(tǒng)解決方案
斗輪機5G遠程監(jiān)控物聯(lián)網(wǎng)系統(tǒng)解決方案
火電廠斗輪機PLC數(shù)據(jù)采集如何實現(xiàn)
MT6701 磁編碼 IC:智能汽輪機葉片焊接系統(tǒng)的優(yōu)化與升級
關(guān)于“低空安防”之衛(wèi)星授時安全防護隔離裝置,你知道嗎?

工業(yè)控制系統(tǒng)面臨的網(wǎng)絡(luò)安全威脅有哪些
知語云全景監(jiān)測技術(shù):現(xiàn)代安全防護的全面解決方案
XKCON祥控斗輪堆取料機自動化控制系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論