 基于MicroROS學習板的串口通信接收實驗
基于MicroROS學習板的串口通信接收實驗
你好,我是愛吃魚香ROS的小魚。上一節我們完成了第一個Hello World工程,學習使用了串口模塊的初始化和發送,本節我們再來一個串口接收小實驗,把串口收發數據補齊。
本教程所使用硬件平臺為MicroROS學習板V1.0.0,可點擊閱讀原文購買及查看詳情

一、檢測并接收單個字符
1.1 代碼編寫
/**
* @file demo01_read_byte.cpp
* @author fishros@foxmail.com
* @brief 初始化串口,當有數據過來的時候讀取并將數據打印出來
* @version 0.1
* @date 2022-12-18
*
* @copyright Copyright (c) 2022
*
*/
#include < Arduino.h >
void setup()
{
// 初始化串口
Serial.begin(115200);
}
void loop()
{
// 判斷是否有有效數據,返回值是有效數據的長度
if (Serial.available())
{
// 讀取一個數據
int c = Serial.read();
// -1 代表接收失敗
if (c != -1)
{
// 以%c字符的格式輸出接收的數據
Serial.printf("I receve %c\\n", c);
}
}
}
這里多用了一個函數Serial.available(),該函數代表當前串口中緩存有效數據的長度。
1.2 使用串口監視器發送消息
使用快捷鍵,編譯 Ctrl+Alt+B、上傳 Ctrl+Alt+U,接著準備發送數據
因為要發送消息,這里我們換一個收發分離的串口監視器來進行數據發送
使用Ctrl+Alt+~打開終端,接著在終端中你可以看到串口監視器一欄

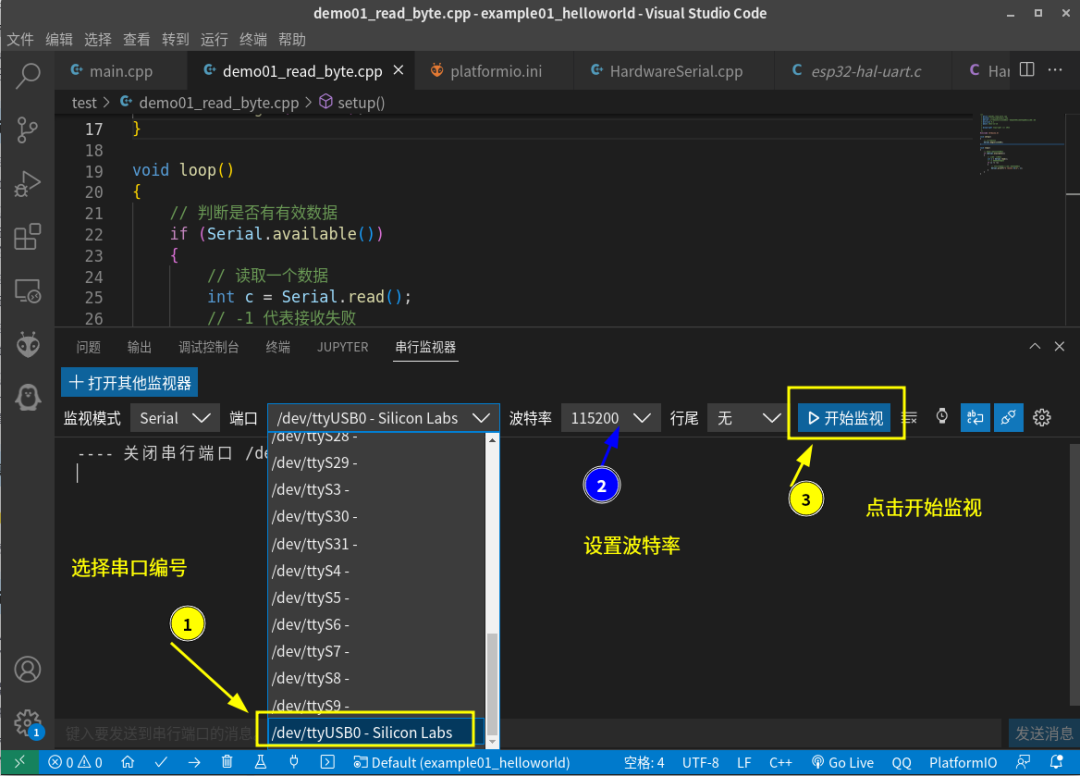
接著打開我們板子對應的串口設備
?選擇串口編號
?設置波特率
?點擊開始監視
發送測試
?輸入數據
?點擊發送
?查看返回

嘗試發送12

可以看到收到了兩條返回,這是因為我們每次只接收一個數據,所以即使發送12,接收數據也是一個一個接收和打印的。
那有沒有辦法一次性接收多個數據呢?我們換個函數即可。
二、一次性接收一串數據
2.1 代碼編寫
/**
* @file demo01_read_byte.cpp
* @author fishros@foxmail.com
* @brief 初始化串口,當有數據過來的時候讀取并將數據打印出來
* @version 0.1
* @date 2022-12-18
*
* @copyright Copyright (c) 2022
*
*/
#include < Arduino.h >
void setup()
{
// 初始化串口
Serial.begin(115200);
}
void loop()
{
// 判斷是否有有效數據
if (Serial.available())
{
// 讀取一個String字符串數據
String str = Serial.readString();
// 以%s的格式輸出接收的數據
Serial.printf("I receve %s\\n", str.c_str());
}
}
2.2 編譯下載
點擊按鈕或者使用快捷鍵編譯下載代碼。
如果你在下載代碼時遇到下面的錯誤,是因為剛剛的串口監視器沒有關閉,
Auto-detected: /dev/ttyUSB0
Uploading .pio/build/featheresp32/firmware.bin
esptool.py v4.2.1
Serial port /dev/ttyUSB0
Connecting...........
serial.serialutil.SerialException: device reports readiness to read but returned no data (device disconnected or multiple access on port?)
*** [upload] Error 1
點擊停止監視后,繼續下載即可

2.3 測試
下載完成后,重新打開串口,接著發送一串消息

三、總結
本節我們通過兩個串口接收數據小實驗,學習了串口數據的接收和發送。 下一節我們開始學習如何完成點燈。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
串口通信
+關注
關注
34文章
1627瀏覽量
55732 -
代碼
+關注
關注
30文章
4828瀏覽量
69055 -
學習板
+關注
關注
0文章
45瀏覽量
12196 -
ROS
+關注
關注
1文章
280瀏覽量
17100
發布評論請先 登錄
相關推薦
串口通信實驗分享
實驗四、串口通信實驗? 自律學習堅強 ,拒絕迷茫。作者:行走的皮卡丘時間:2021/4/4喜歡就去追,這個紅燈等不到,說不定下一個紅燈等到了,嘻嘻!!!!!!!文章目錄
發表于 01-14 09:08
上位機串口通信數據接收事件程序
上位機 串口 通信主要介紹通信串口的初始化和串口緩沖區數據的讀取,因為此處只是作為指令來讀取,數據量小,所以緩沖區數據的讀取為有數據
發表于 03-13 15:08
?4002次閱讀

stc32G12k128使用舊清翔51實驗板學習UART通信實驗
stc32G12k128使用舊清翔51實驗板學習UART通信實驗程序,利用舊版,學習32位單片機的串口
發表于 11-21 10:21
?3次下載





 工商網監
工商網監
評論