") 梁山派開發(fā)板-21年電賽F題-送藥小車-賽題分析
梁山派開發(fā)板-21年電賽F題-送藥小車-賽題分析
送藥小車代碼倉庫:https://gitee.com/lcsc/medical_car
更好的觀看體驗(yàn)請去:https://dri8c0qdfb.feishu.cn/wiki/UjwwwO0KZii5bykPcE4cJZafnAg
送藥小車立創(chuàng)開源平臺(tái)資料:https://oshwhub.com/li-chuang-kai-fa-ban/21-dian-sai-f-ti-zhi-neng-song-yao-xiao-che
1.賽題分析
原始題目
題目分析
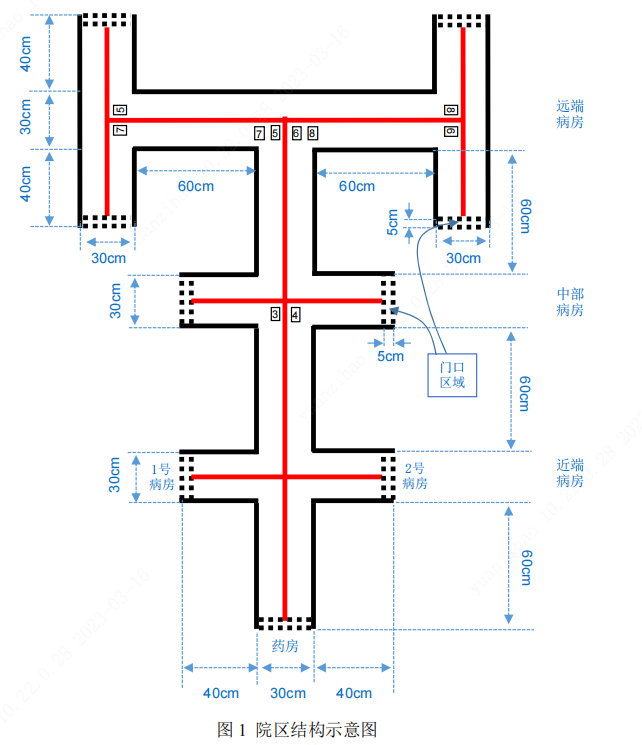
結(jié)構(gòu)相關(guān)
小車長×寬×高不大于 25cm×20cm×25cm,只能使用普通車輪。在轉(zhuǎn)彎時(shí)不能碰到走廊邊緣,所以小車要盡可能小,越小越不容易碰到走廊邊緣。
藥品重約 200g。
硬件相關(guān)
兩個(gè)小車均由電池供電。
兩車之間要能無線通訊。
外界不能有任何附加電路與控制裝置。
要有一個(gè) RGB 燈(通過不同的 PWM 值控制來切換顏色)或者直接三個(gè)紅,黃,綠燈。
作品應(yīng)能適應(yīng)無陽光直射的自然光照明及頂置多燈照明環(huán)境,測試時(shí)不得有特殊照明條件要求。
軟件相關(guān)
每次測試開始時(shí),只允許按一次復(fù)位鍵,裝載藥品后即刻啟動(dòng)運(yùn)送時(shí)間記時(shí),卸載藥品后即刻啟動(dòng)返回時(shí)間記時(shí)。不能人工干預(yù),測試項(xiàng)目只能測試一次。
在藥房處識別病房號的時(shí)間不超過 20s,發(fā)揮部分 1 中自選暫停點(diǎn)處的小車 2 與小車 1 的車頭投影外沿中心點(diǎn)的紅實(shí)線距離不小于 70cm。
有任何一個(gè)指示燈處于點(diǎn)亮狀態(tài)的小車必須處于停止?fàn)顟B(tài),運(yùn)送過程中不允許在同一走廊上錯(cuò)車或超車。
功能(得分)相關(guān)
近端病房號位置固定不變,中部病房和遠(yuǎn)端病房號(3-8 號)在測試時(shí)隨機(jī)設(shè)定。
檢測到藥品裝載完成后就開始自動(dòng)運(yùn)送。
單個(gè)小車運(yùn)送藥品到指定的近端病房并返回到藥房,運(yùn)送時(shí)間和返回時(shí)間均小于 20s,超時(shí)扣分。
基本要求
根據(jù)走廊上的標(biāo)識信息自動(dòng)識別,尋徑將藥品送到指定病房,投影要在門口區(qū)域內(nèi),
到了指定病房后,點(diǎn)亮紅色指示燈,等待卸載藥品。
人工卸掉藥品后,小車自動(dòng)熄滅紅色指示燈,開始返回。
自動(dòng)返回藥房,點(diǎn)亮綠色指示燈。
發(fā)揮部分
兩個(gè)小車協(xié)同運(yùn)送到同一指定的中部病房,小車 1 到達(dá)病房后等待卸載藥品,小車 2 識別病房房號裝載藥品后啟動(dòng)運(yùn)送,到達(dá)自選暫停點(diǎn)后暫停,點(diǎn)亮黃色指示燈,等待小車 1 卸載;小車 1 卸載藥品后開始返回,同時(shí)控制小車 2 熄滅黃色指示燈,繼續(xù)運(yùn)送。(從小車 2 啟動(dòng)運(yùn)送開始,到小車 1 返回藥房且小車 2 到達(dá)病房的總時(shí)間越短越好,不計(jì)算小車 2 黃燈亮?xí)r的暫停時(shí)間,不超過 60s)
兩個(gè)小車協(xié)同運(yùn)送到不同的遠(yuǎn)端病房送、取藥品,小車 1 送藥,小車 2 取藥。小車 1 識別病房號裝載藥品后開始運(yùn)送,小車 2 在藥房處識別病房號等待小車 1 的取藥開始指令;小車 1 到達(dá)病房后卸載藥品,開始返回,同時(shí)向小車 2 發(fā)送啟動(dòng)取藥指令;小車 2 收到取藥指令后開始啟動(dòng),到達(dá)病房后停止,亮紅色指示燈(從小車 1 返回開始,到小車 1 返回到藥房且小車 2 到達(dá)取藥病房的總時(shí)間越短越好,不超過 60s)
其他
如何基于梁山派制作一個(gè)送藥小車
從上面的題目我們可以分析出,完成題目的基礎(chǔ)要求有這些:
主控
驅(qū)動(dòng)小車前進(jìn)和轉(zhuǎn)彎的動(dòng)力裝置(只能用普通車輪)
驅(qū)動(dòng)方式選擇
后驅(qū)+前置舵機(jī)轉(zhuǎn)向方式(就是平常路上開的那種小轎車的結(jié)構(gòu),適用于路線直角轉(zhuǎn)彎比較少的地方,相信大家也知道汽車過直角彎有多麻煩,這種對轉(zhuǎn)彎半徑要求較高,并且還需要考慮后兩輪差速問題)
四輪驅(qū)動(dòng)+差速轉(zhuǎn)彎(比如最近比亞迪新出的仰望 U8,他的輪子由四個(gè)電機(jī)獨(dú)立控制,每一個(gè)電機(jī)可以單獨(dú)控制輪子實(shí)現(xiàn)正轉(zhuǎn)和反轉(zhuǎn),當(dāng)左側(cè)兩個(gè)輪子和右側(cè)兩個(gè)輪子以相反的方向轉(zhuǎn)動(dòng)時(shí),就可以實(shí)現(xiàn)原地轉(zhuǎn)向)
兩輪驅(qū)動(dòng)+萬向輪||牛眼輪(對于這個(gè)比賽我認(rèn)為用兩個(gè)輪子+一個(gè)或兩個(gè)從動(dòng)輪就夠用了,而且輪子電機(jī)少,做出來的小車尺寸也更小,不容易壓到題目中說的走廊邊緣。這個(gè)的轉(zhuǎn)彎就是給兩個(gè)電機(jī)不同的轉(zhuǎn)動(dòng)方向就行了)
電機(jī)選擇
直流減速有刷電機(jī)
轉(zhuǎn)速范圍廣,轉(zhuǎn)速高,扭矩大。
控制簡單,使用方便。
價(jià)格低廉。
需要外接減速器,體積較大。
轉(zhuǎn)速波動(dòng)較大,精度不高。
不適合高精度運(yùn)動(dòng)控制。
轉(zhuǎn)動(dòng)精度高,不需要編碼器。
可以實(shí)現(xiàn)高精度定位和運(yùn)動(dòng)控制。
適合低速高精度運(yùn)動(dòng)。
轉(zhuǎn)矩小,轉(zhuǎn)速慢。
需要驅(qū)動(dòng)器,控制復(fù)雜。
價(jià)格相對較高。
FOC 無刷電機(jī)
轉(zhuǎn)速范圍廣,轉(zhuǎn)速高,扭矩大。
轉(zhuǎn)速精度高,控制精度高。
能夠?qū)崿F(xiàn)高效能、低噪音的運(yùn)行。
硬件成本相對較高。
控制復(fù)雜,需要配合專門的控制器使用。
對控制算法的要求較高。
直流電機(jī)電機(jī)驅(qū)動(dòng)選擇
輪子選擇
檢測地圖中紅線以及檢測門口區(qū)域(黑色)
視覺識別
Openmv(現(xiàn)在最火的嵌入式機(jī)器視覺模塊,使用 MicroPython 驅(qū)動(dòng),可以把它當(dāng)成一個(gè)可編程攝像頭)
K210(是國內(nèi)廠家勘智研發(fā)的一款采用 RISC-V 處理器架構(gòu),典型設(shè)備功耗 1w,算力1TOPS 的 AI 芯片,自帶 SRAM,可以在本地完成數(shù)據(jù)的處理和存儲(chǔ),國內(nèi)廠家也根據(jù) openmv 的 IDE 重新制作了 Canmv IDE 和 Maixpy IDE)
樹莓派,卡片個(gè)人電腦,可以在上面直接運(yùn)行 OpenCV,進(jìn)行循跡和數(shù)字識別,性能比上面兩個(gè)都強(qiáng)得多,但是開發(fā)難度也是最大的,它可以用很高清的攝像頭,用它來參賽簡直可以說是降維打擊。
光電二極管灰度傳感器(主要是利用光電二極管對光線的敏感性,通過測量物體表面反射的光線強(qiáng)度來確定物體表面的灰度值,探測到不同顏色地面時(shí)會(huì)產(chǎn)生不同的電壓值,電壓值會(huì)隨被測面的顏色變化而變化,所以理論上可以識別任意顏色)
模擬式(模擬式需要單片機(jī)自帶 AD 采集(模擬量采集),采集到的信息更準(zhǔn)確,需要在單片機(jī)端自己設(shè)置閾值來進(jìn)行判斷當(dāng)前識別的顏色)
數(shù)字式(他就是基于模擬式,一般會(huì)自帶一個(gè)處理芯片或者比較器,通過手動(dòng)調(diào)整電路板上的旋轉(zhuǎn)電阻器來設(shè)置靈敏度,針腳直接輸出的就是高低電平)
紅外反射傳感器(只適用于黑線識別,調(diào)整非常麻煩,基本上是不能用,雖然他簡單,不易受光線影響,但是他是無法區(qū)分白和紅的,而本次題目中是紅線)
線性CCD,可以說他是只有一個(gè)像素的攝像頭,是一個(gè)一維的攝像頭,他可以很容易識別紅色與白色。
小車底板和固定藥品裝置,固定攝像頭機(jī)構(gòu),供電電池,緊急開關(guān)
小車底板一般常用的板材有
亞克力板
碳纖板
玻纖板
電木板
鋁合金板
固定藥品裝置
固定攝像頭裝置
供電電池
緊急開關(guān)
用來識別任務(wù)目標(biāo)房號和走廊上房號的數(shù)字識別模塊
用來指示小車工作狀態(tài)的的 LED 燈
Reverse Voltage: 5V(最大反向電壓,超過這個(gè)就會(huì)壞)
R: 25mA
G: 25mA
Y: 25mA
Forward Voltage: (正向電壓)
R: 2.0V
G: 3.3V
Y: 2.0V
R:電阻值:120Ω,功率 0.075 -貼片電阻 0603 以上-立創(chuàng)商城編號:C22787
G:電阻值:68Ω,功率 0.0425 -貼片電阻 0402 以上-立創(chuàng)商城編號:C25254
Y:電阻值:120Ω,功率 0.075 -貼片電阻 0603 以上-立創(chuàng)商城編號:C22787
用于雙車通訊的無線模塊
WiFi 模塊:WiFi 模塊可以實(shí)現(xiàn)高速無線網(wǎng)絡(luò)連接,但是其功耗較高,不適合低功耗應(yīng)用。
藍(lán)牙模塊:藍(lán)牙模塊具有低功耗、短距離通信等特點(diǎn),但是其傳輸速率較慢,適用于數(shù)據(jù)量較小的場景。
Zigbee 模塊:Zigbee 模塊具有低功耗、低成本、自組網(wǎng)等特點(diǎn),適用于物聯(lián)網(wǎng)應(yīng)用。
LoRa 模塊:LoRa 模塊具有長距離、低功耗、低成本等特點(diǎn),適用于物聯(lián)網(wǎng)應(yīng)用。
NB-IoT 模塊:NB-IoT 模塊具有低功耗、廣覆蓋等特點(diǎn),適用于物聯(lián)網(wǎng)應(yīng)用。
其他附加
可以加一個(gè)無源蜂鳴器來進(jìn)行提示和報(bào)警,當(dāng)電池電壓過低或者出現(xiàn)錯(cuò)誤時(shí)進(jìn)行蜂鳴器報(bào)警。
可以加一個(gè)六軸或者九軸的姿態(tài)傳感器,通過姿態(tài)解算可以得到當(dāng)前航向角,可以讓小車在一定時(shí)間內(nèi)保持車頭朝向不變,這樣就算車輪打滑小車的車頭朝向也不會(huì)大變。但是這個(gè)方法對姿態(tài)傳感器的數(shù)據(jù)要求和算法處理的要求也很高。
預(yù)留灰度傳感器的接口,別萬一識別巡線效果拉了,硬著頭皮也走不下去就G了,多給自己留條后路。
加一個(gè) CAN 芯片,如果你想用 can 芯片控制電機(jī)的話就可以用了,大疆的 robomaster 系列電機(jī)和市面上的一些高性能電機(jī)都是可以用 CAN 通訊來控制的
加一個(gè) sbus 電路,參加完比賽做個(gè)小遙控車也不錯(cuò)。
-
單片機(jī)
+關(guān)注
關(guān)注
6043文章
44621瀏覽量
638605 -
智能小車
+關(guān)注
關(guān)注
87文章
549瀏覽量
81861 -
GD32
+關(guān)注
關(guān)注
7文章
413瀏覽量
24475 -
LoRa
+關(guān)注
關(guān)注
349文章
1700瀏覽量
232386
發(fā)布評論請先 登錄
相關(guān)推薦
【賽題發(fā)布】2025集創(chuàng)賽中科億海微賽道正式啟動(dòng)!

EDA精英挑戰(zhàn)賽賽果公布!思爾芯“戰(zhàn)隊(duì)”薪火相承斬獲“麒麟杯”

ARM開發(fā)板與樹莓派的比較
參加電賽需要準(zhǔn)備什么

50萬獎(jiǎng)金池!開放原子大賽——第二屆OpenHarmony創(chuàng)新應(yīng)用挑戰(zhàn)賽正式啟動(dòng)
授人以漁,24電賽H題完賽資料開源,思想開源-(2)軟件講解
授人以漁,24電賽H題完賽資料開源,思想開源-(1)硬件講解
樹莓派和arm開發(fā)板的區(qū)別
linux開發(fā)板與樹莓派的區(qū)別
【核桃派ZeroW開發(fā)板體驗(yàn)連載】核桃派ZeroW開發(fā)板拆箱、組裝、上電,
思爾芯賽題正式發(fā)布,邀你共戰(zhàn)EDA精英挑戰(zhàn)賽!
用悟空派全志H3開發(fā)板做一個(gè)基于ROS系統(tǒng)的全向輪小車
SECO賽柯解決新型廣播VoIP分析儀的難題
TPU編程競賽|研電英才,集結(jié)號已吹響——研電賽·算能杯等你來戰(zhàn)!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論