") 車載攝像頭的工作原理、分類及仿真驗證
車載攝像頭的工作原理、分類及仿真驗證
01前言
目前,車載攝像頭傳感器是主流的自動駕駛系統(tǒng)傳感器之一,視覺感知的方案也是大多數(shù)汽車廠商的感知融合方案的重要組成部分。攝像頭技術(shù)成熟且價格適中,在未來很長一段時間都將會是自動駕駛系統(tǒng)傳感器的優(yōu)選方案。
02工作原理
車載攝像頭由鏡頭、CMOS/CCD圖像傳感器、圖像信號處理器以及串行器組成。它的工作原理是:物體表面反射的光線通過鏡頭入射到CMOS/CCD圖像傳感器,圖像傳感器將接收到的光信號轉(zhuǎn)換為數(shù)字信號并傳遞給圖像信號處理器,圖像信號處理器對數(shù)字信號進行圖像濾波和增強,并通過串行器對處理過的圖像信息進行串行化后傳輸給域控制器。
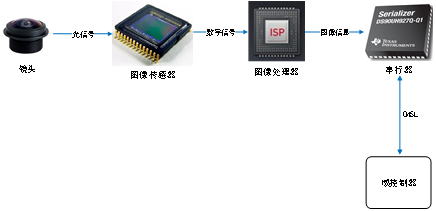
圖1車載攝像頭工作原理示意圖
攝像頭重要參數(shù)包括:
焦距,是鏡頭光學(xué)中心到感光元件成像平面的距離,焦距與探測范圍成正比,焦距越大,一般其探測范圍就越遠;
視場角,分為水平視場角和垂直視場角,描述攝像頭的視野角度;
分辨率,攝像頭畫面中X軸像素點數(shù)乘以Y軸的像素點數(shù),分辨率越高,畫面越清晰;
信噪比,是信號電壓對噪聲電壓的比值,信噪比越高表明產(chǎn)生的雜波信號越少,圖像的信號質(zhì)量也就越好;
動態(tài)范圍,指拍攝的同一個畫面內(nèi),能正常顯示細節(jié)的最亮和最暗物體的亮度值所包含的那個區(qū)間。動態(tài)范圍越大,過亮或過暗的物體在同一個畫面中都能正常顯示的程度也就越大。
03分類及其應(yīng)用
車載攝像頭根據(jù)安裝位置分為五類:前視、后視、側(cè)視、環(huán)視以及內(nèi)置攝像頭。
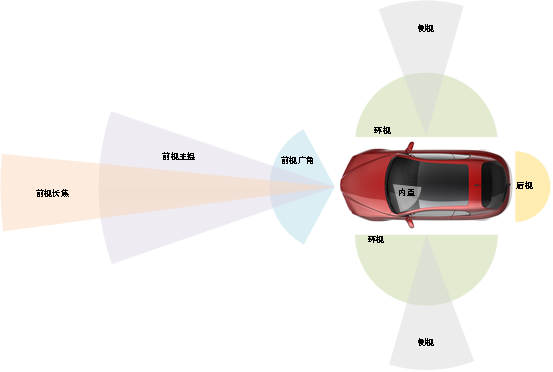
圖2車載攝像頭布置圖
前視攝像頭,前視攝像頭一般安裝在前擋風(fēng)玻璃的上方,用于目標(biāo)識別和測距測速,根據(jù)功能,又可以分為前視主攝像頭、前視廣角攝像頭以及前視長焦攝像頭。
前視主攝像頭,視場角60-80°左右,探測距離150m左右,用于監(jiān)測車輛前方的寬闊視野,基本上能夠覆蓋大部分交通場景。
前視廣角攝像頭,視場角120° - 150°左右,探測距離在50 m左右的魚眼攝像頭,能夠拍攝到交通信號燈、行駛路線上的障礙物和距離較近的物體,非常適用于城市街道、低速緩行的交通場景。
前視長焦攝像頭,視場角30°左右,探測距離可達250 m以上,視野相對較窄,適用于高速行駛的交通場景。
后視攝像頭,視場角120-140°左右,探測距離50 m左右。一般安裝在后備箱上,主要功能是實現(xiàn)泊車輔助。
側(cè)視攝像頭,視場角一般為 90°-100°,探測距離80 m 左右,安裝在車輛兩側(cè)的中間位置,主要作用是檢測側(cè)向車輛及自行車。
環(huán)視攝像頭,安裝在車身四周,一般使用4-8個魚眼攝像頭,可分為前向魚眼攝像頭/左側(cè)魚眼攝像頭/右側(cè)魚眼攝像頭/后向魚眼攝像頭。用于全景環(huán)視功能的顯示,以及融合泊車功能的視覺感知及目標(biāo)檢測。
內(nèi)置攝像頭,一般安裝在中控臺,正對著駕駛員的面部,用于監(jiān)控駕駛員的駕駛狀態(tài),進行疲勞提醒等。
(1)攝像頭的優(yōu)點包括:
種類齊全,技術(shù)成熟,攝像頭在日常生活中用處廣泛,衍生出了不同焦距和視場角的產(chǎn)品,覆蓋了車載的需求;
成本適中,相比于昂貴的激光雷達,攝像頭的價格是更加低廉的;
性能強大,攝像頭能夠探測到物體的顏色、紋理、輪廓、亮度信息,對于識別紅綠燈、交通標(biāo)志這種帶有顏色特征的目標(biāo)具有獨到的優(yōu)勢。
(2)攝像頭的局限性體現(xiàn)在:
攝像頭傳感器易受光線影響,在黑夜、雪天、雨天等能見度下降的條件下,攝像頭的性能會下降;
攝像頭傳感器的測試測距能力略差于雷達,雷達可根據(jù)多普勒效應(yīng)直接計算目標(biāo)的距離和速度,攝像頭則依賴算法估計,準(zhǔn)確性不如雷達。
04仿真驗證
攝像頭的仿真驗證是自動駕駛系統(tǒng)仿真的一部分,主要有兩種形式:一種是暗箱仿真,另外一種是視頻注入。
暗箱仿真,預(yù)先準(zhǔn)備一個暗箱,內(nèi)置高清顯示器、增距透鏡以及攝像頭支架,將待仿真的攝像頭放在支架上,通過調(diào)整支架使顯示器、透鏡、攝像頭的中心點在同一條水平線上。顯示器播放仿真的場景畫面,使用增距透鏡對畫面進行放大,確保放大后的畫面能夠布滿攝像頭感光元件的表面。攝像頭通過增距透鏡實時拍攝放大后的畫面,并將圖像信息處理后回傳,就完成了攝像頭的仿真。
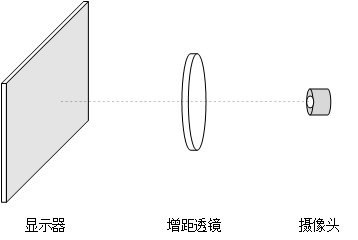
圖3視頻暗箱工作原理示意圖
視頻注入,將仿真場景視頻流直接通過HDMI協(xié)議傳送到視頻注入單元,該視頻注入單元能將HDMI視頻轉(zhuǎn)碼為符合GMSL協(xié)議的串行數(shù)據(jù)流,然后將串行的數(shù)據(jù)流注入到域控制器中。
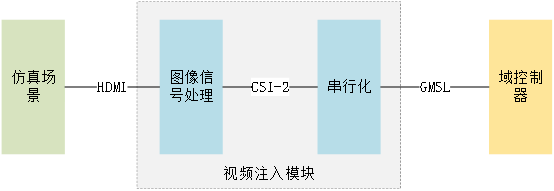
圖4視頻注入仿真原理示意圖
由上可以總結(jié)得出,不管哪種仿真方式,都離不開仿真場景,且場景中至少應(yīng)該包含攝像頭模型、車輛模型、目標(biāo)模型。其中攝像頭模型提供仿真畫面的視角,也就是說傳輸給暗箱或者視頻注入模塊的畫面是通過攝像頭視角“看”到的;車輛模型是用來安放待測的攝像頭的,攝像頭的位置決定了它的功能;目標(biāo)模型即為攝像頭拍攝的目標(biāo),可以是其他車輛、行人、標(biāo)志標(biāo)線、路牌等等。
西門子的場景仿真軟件Prescan的一大特點就是具備豐富的傳感器模型,其中就包括2款攝像頭傳感器——普通單目攝像頭和魚眼攝像頭。
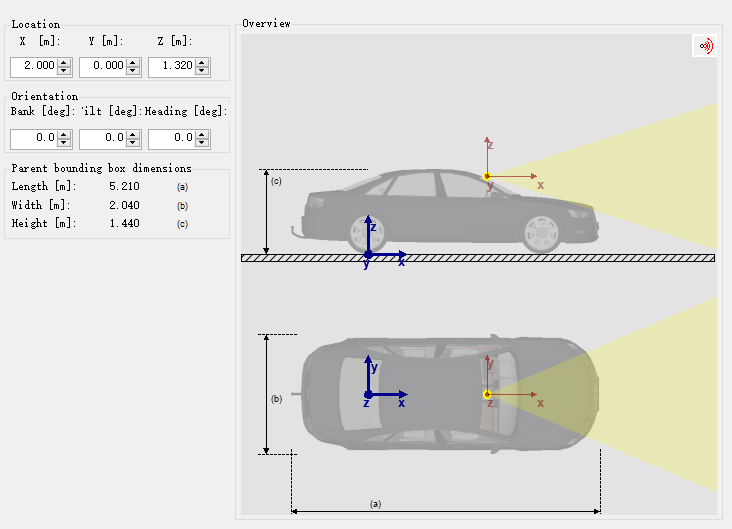
圖5攝像頭模型安裝位置設(shè)置
以普通單目攝像頭模型為例,在Prescan中,可以設(shè)置攝像頭的安裝位置,包括XYZ位置和沿XYZ方向轉(zhuǎn)動的情況,且可以直觀地在預(yù)覽界面中觀察。
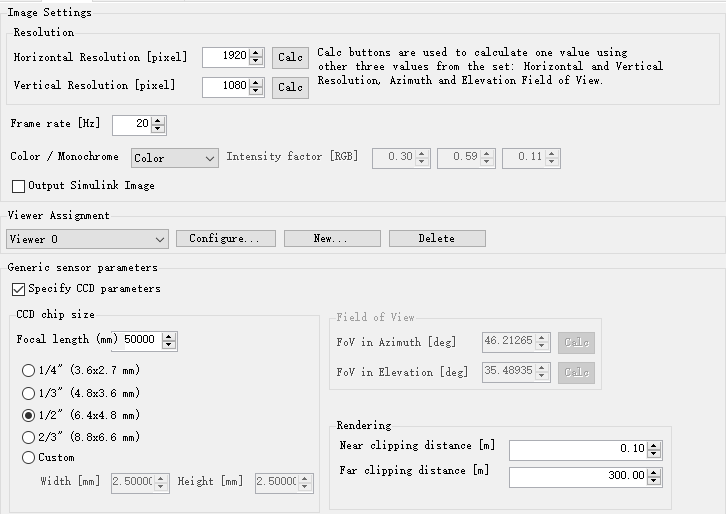
圖6攝像頭傳感器參數(shù)設(shè)置
還可以設(shè)置攝像頭模型的分辨率、幀率、顏色模式、焦距、鏡頭尺寸、渲染范圍。除此之外,Prescan的攝像頭傳感器還可以添加各種效果,比如模糊、HDR、等立體角、正交投影、平射投影、雨滴效果、臟污效果等。
有了攝像頭模型,攝像頭仿真驗證的問題也就迎刃而解了:
根據(jù)實際的攝像頭參數(shù)來配置攝像頭模型的參數(shù);
搭建場景,并輸出攝像頭視角的畫面;
使用暗箱或者視頻注入的方式將畫面信息傳遞給域控制器;
域控制器根據(jù)獲得的畫面信息,確定是否激活相應(yīng)的自動駕駛功能。
05結(jié)語
車載的攝像頭傳感器的探測范圍和視場角都十分靈活,既可以遠程探測,也可以輔助泊車;既可以定點識別,也可以全景影像化;既可以描述輪廓,又能夠辨別色彩。用一種傳感器覆蓋了好幾種其他傳感器的功能,這也是某些主機廠敢于使用純視覺感知方案的原因。攝像頭有自己弱勢的地方,但總的來說在自動駕駛領(lǐng)域是不可或缺的。
作為自動駕駛仿真測試的一部分,攝像頭仿真的核心是攝像頭傳感器模型,優(yōu)質(zhì)的傳感器模型能夠通過一系列參數(shù)設(shè)置,最大程度地還原攝像頭視角下的畫面,讓仿真測試的結(jié)果更有說服力。
審核編輯:湯梓紅
-
傳感器
+關(guān)注
關(guān)注
2553文章
51388瀏覽量
756558 -
CMOS
+關(guān)注
關(guān)注
58文章
5735瀏覽量
236085 -
CCD
+關(guān)注
關(guān)注
32文章
884瀏覽量
142580 -
仿真驗證
+關(guān)注
關(guān)注
0文章
25瀏覽量
8159 -
車載攝像頭
+關(guān)注
關(guān)注
5文章
138瀏覽量
28138
原文標(biāo)題:【會員風(fēng)采】海冰科技|車載攝像頭傳感器及其仿真驗證
文章出處:【微信號:qidianxiehui,微信公眾號:深圳市汽車電子行業(yè)協(xié)會】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
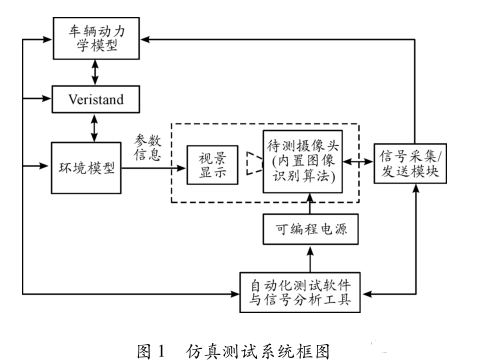
基于硬件的車載攝像頭車道偏離預(yù)警系統(tǒng)仿真測試方案

攝像頭的工作原理 Product information
手機camera攝像頭工作原理
ISP和攝像頭工作原理
什么是CCD,ccd攝像頭工作原理
攝像頭的工作原理
車載攝像頭的工作原理_車載攝像頭怎么使用
車載攝像頭安全為本 技術(shù)不斷升級
車載攝像頭防水檢測重要嗎?-海瑞思

車載攝像頭防水設(shè)計要點

攝像頭及紅外成像的基本工作原理






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論