") 基于C-V2X的車路協(xié)同自動(dòng)駕駛關(guān)鍵技術(shù)與應(yīng)用
基于C-V2X的車路協(xié)同自動(dòng)駕駛關(guān)鍵技術(shù)與應(yīng)用
隨著車聯(lián)網(wǎng)技術(shù)的演進(jìn),自動(dòng)駕駛在單車智能的基礎(chǔ)上,又有了新的發(fā)展形態(tài)——車路協(xié)同自動(dòng)駕駛。通過“人-車-路-云”深度融合形成的一體化復(fù)雜信息物理系統(tǒng)(cyber physical system,CPS),可以與自動(dòng)駕駛車輛實(shí)現(xiàn)協(xié)同感知、協(xié)同決策規(guī)劃甚至協(xié)同控制,提升自動(dòng)駕駛安全性,幫助克服各類復(fù)雜交通環(huán)境。首先介紹了車路協(xié)同的復(fù)雜信息物理系統(tǒng)的概念內(nèi)涵和總體架構(gòu),并提出了車路協(xié)同自動(dòng)駕駛的一系列典型應(yīng)用場景、技術(shù)原理、C-V2X(cellular vehicle-to-everything)性能要求、車路協(xié)同系統(tǒng)功能與性能要求,可以為下一階段智能網(wǎng)聯(lián)汽車與智能交通的深度融合發(fā)展提供參考和解決思路。
0 引言
車聯(lián)網(wǎng)(V2X)無線通信技術(shù)是實(shí)現(xiàn)車輛與周圍的車、人、交通基礎(chǔ)設(shè)施和云(平臺(tái))等全方位連接和信息通信的新一代信息通信技術(shù),而蜂窩車聯(lián)網(wǎng)(cellular vehicle-to-everything,C-V2X)則是由我國在國際上首先提出的一種車聯(lián)網(wǎng)無線通信技術(shù),它融合了蜂窩移動(dòng)通信和直連通信兩種模式,包括基于4G LTE 的LTE-V2X 和基于5G新空口(new radio,NR)的NR-V2X 兩個(gè)發(fā)展階段。
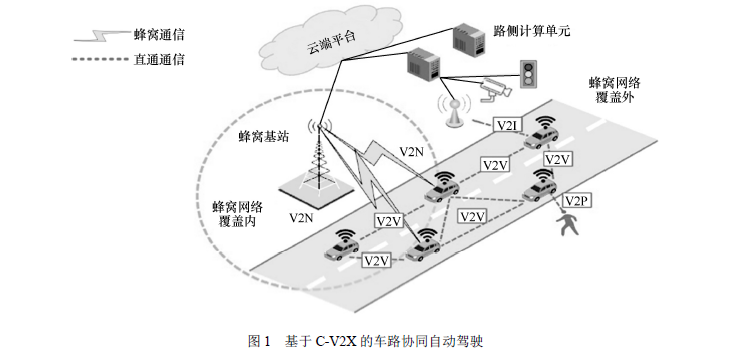
C-V2X 是實(shí)現(xiàn)自動(dòng)駕駛的關(guān)鍵支撐,在自動(dòng)駕駛領(lǐng)域,已經(jīng)將基于C-V2X 的自動(dòng)駕駛方案上升為自動(dòng)駕駛的另一條技術(shù)路線,即車路協(xié)同自動(dòng)駕駛(vehicle infrastructure cooperative autonomousdriving,VICAD)。基于C-V2X 的車路協(xié)同自動(dòng)駕駛?cè)鐖D1 所示,VICAD 的核心是通過C-V2X,將“人-車-路-云”交通要素有機(jī)地聯(lián)系在一起,實(shí)現(xiàn)車與車(V2V)、車與道路(V2I,主要指道路各類系統(tǒng)和設(shè)備設(shè)施,如感知設(shè)施、氣象檢測器、狀態(tài)監(jiān)測設(shè)備、交通誘導(dǎo)與控制設(shè)施等)、車與云(V2N,包括地圖平臺(tái)、交管平臺(tái)、出行服務(wù)平臺(tái)等)和車與人(V2P)等的全方位協(xié)同配合(如協(xié)同感知、協(xié)同決策規(guī)劃、協(xié)同控制等),從而滿足不同等級(jí)自動(dòng)駕駛車輛應(yīng)用需求(如駕駛輔助、輔助駕駛或高等級(jí)自動(dòng)駕駛),實(shí)現(xiàn)自動(dòng)駕駛單車最優(yōu)化和交通全局最優(yōu)化發(fā)展目標(biāo)。
世界各國都高度重視與VICAD 相關(guān)技術(shù)的研究和產(chǎn)業(yè)應(yīng)用。美國2004 年就啟動(dòng)了車路集成(vehicle-infrastructure integration,VII)系統(tǒng)研究計(jì)劃,并連續(xù)發(fā)布了《自動(dòng)駕駛車輛綜合計(jì)劃》(Automated Vehicles Comprehensive Plan)、《智能交通系統(tǒng)戰(zhàn)略計(jì)劃》(ITS Strategic Plan)等一系列綱領(lǐng)性文件,并主導(dǎo)了智能駕駛(IntelliDrive)項(xiàng)目、網(wǎng)聯(lián)自動(dòng)駕駛(Connected Vehicle Pilot)項(xiàng)目、協(xié)同式駕駛出行應(yīng)用(Cooperative AutomationResearch Mobility Applications,CARMA)研究項(xiàng)目等一系列研究和驗(yàn)證示范項(xiàng)目;歐洲也在ITS-G5、4G/5G 通信技術(shù)的基礎(chǔ)上,發(fā)布了《網(wǎng)聯(lián)自動(dòng)駕駛路線圖》(Connected Automated DrivingRoadmap ) 、《合作智能交通系統(tǒng)和服務(wù)》(Cooperative Intelligent Transport Systems and Services)、《互聯(lián)、合作和自動(dòng)移動(dòng)》(Cooperative,Connected and Automated Mobility,CCAM)等頂層設(shè)計(jì)規(guī)劃,并在歐洲地平線計(jì)劃(HorizonEurope)總體框架下,主導(dǎo)開展了大量的研究測試和建設(shè)部署項(xiàng)目,如eSafety、CVIS、Drive C2X、CAR2CAR 和C-ROADS 等;日本早在2006 年就啟動(dòng)了下一代“Smartway 計(jì)劃”,通過整合ITS的各種功能,建立全國性的車載集成平臺(tái),為車輛提供ETC、DSSS、ASV 等服務(wù),2017 年9 月,日本東京發(fā)布最新一版城市總體規(guī)劃《都市營造的宏偉設(shè)計(jì)—東京2040》,推進(jìn)“新東京”實(shí)現(xiàn)3 個(gè)愿景:“安全城市”“多彩城市”和“智慧城市”。
中國積極推動(dòng)VICAD 技術(shù)和產(chǎn)業(yè)發(fā)展,從頂層設(shè)計(jì)、戰(zhàn)略布局、行業(yè)應(yīng)用等層面進(jìn)行系統(tǒng)性推進(jìn),目前總體處于全球領(lǐng)先水平。在技術(shù)路線與政策體系方面,“單車智能+網(wǎng)聯(lián)賦能”自動(dòng)駕駛技術(shù)路線已成為廣泛共識(shí),政府主管部門積極加強(qiáng)頂層規(guī)范設(shè)計(jì),營造產(chǎn)業(yè)發(fā)展的良好環(huán)境,出臺(tái)了一系列政策文件,包括《擴(kuò)大內(nèi)需戰(zhàn)略規(guī)劃綱要(2022—2035 年)》《智能汽車創(chuàng)新發(fā)展戰(zhàn)略》《新能源汽車產(chǎn)業(yè)發(fā)展規(guī)劃(2021—2035)》《交通強(qiáng)國建設(shè)綱要》《交通領(lǐng)域科技創(chuàng)新中長期發(fā)展規(guī)劃綱要(2021—2035 年)》等,為車路協(xié)同自動(dòng)駕駛發(fā)展指明了方向;各地政府部門結(jié)合自身發(fā)展需求和優(yōu)勢,發(fā)布了積極推進(jìn)產(chǎn)業(yè)發(fā)展的一系列指導(dǎo)意見和發(fā)展計(jì)劃,大力發(fā)展車路協(xié)同技術(shù),推動(dòng)產(chǎn)業(yè)應(yīng)用。在技術(shù)驗(yàn)證和應(yīng)用示范方面,工業(yè)和信息化部牽頭先后批準(zhǔn)建設(shè)了江蘇(無錫)、天津(西青)、湖南(長沙)、重慶(兩江新區(qū))等國家級(jí)車聯(lián)網(wǎng)先導(dǎo)區(qū),北京、上海、廣州、深圳等地也大力支持開展車聯(lián)網(wǎng)示范區(qū)建設(shè)和“雙智”試點(diǎn)(智慧城市基礎(chǔ)設(shè)施與智能網(wǎng)聯(lián)汽車協(xié)同發(fā)展試點(diǎn)),加快車路協(xié)同基礎(chǔ)設(shè)施規(guī)模建設(shè)部署,IMT-2020(5G)推進(jìn)組、中國智能網(wǎng)聯(lián)汽車產(chǎn)業(yè)創(chuàng)新聯(lián)盟(CAICV)等組織也先后開展了C-V2X“三跨”“四跨”“新四跨”系列大規(guī)模先導(dǎo)應(yīng)用示范活動(dòng),逐步推動(dòng)VICAD 從封閉開發(fā)走向互聯(lián)互通和大規(guī)模應(yīng)用。
然而,VICAD 是一個(gè)高度復(fù)雜的系統(tǒng)工程,目前整體還處在發(fā)展的初級(jí)階段。為進(jìn)一步推動(dòng)自動(dòng)駕駛技術(shù)成熟,并實(shí)現(xiàn)規(guī)模化應(yīng)用,需要針對(duì)VICAD 進(jìn)一步開展系統(tǒng)性研究,明確VICAD 發(fā)展階段、應(yīng)用場景、車路協(xié)同系統(tǒng)技術(shù)要求和測試方法等內(nèi)容,為VICAD 發(fā)展提供參考和指引。
1 車路協(xié)同自動(dòng)駕駛系統(tǒng)總體設(shè)計(jì)
1.1 系統(tǒng)總體架構(gòu)
VICAD 的本質(zhì)是給每輛車開了一個(gè)“天眼”,它不僅能幫助車輛在“完美”視角下保障安全,還能高效分配道路時(shí)空資源,讓所有交通要素“各行其道”“各得其所”。將支持VICAD 應(yīng)用場景所需的全部要素所組成的新型復(fù)雜系統(tǒng)稱為車路協(xié)同系統(tǒng)(vehicle infrastructure cooperative system,VICS),VICS 模型如圖2 所示。
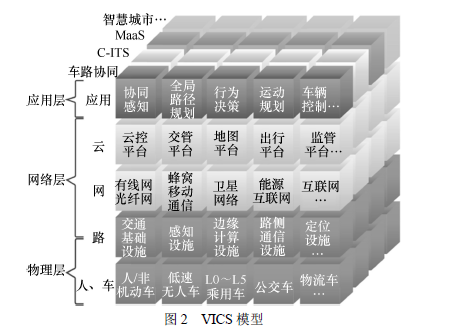
VICS 中的交通參與者、交通運(yùn)輸工具、交通基礎(chǔ)設(shè)施和交通環(huán)境不再只被看作一個(gè)簡單的對(duì)象,人、車、路和環(huán)境所對(duì)應(yīng)的交通要素通過傳感器的采集和融合處理,成為具有自主身份且具備信息交互功能的數(shù)字孿生體。物理實(shí)體和數(shù)字孿生體之間可以通過有效信息流和決策控制流完成信息傳遞和決策控制閉環(huán),例如車輛的遠(yuǎn)程操控、道路紅綠燈的優(yōu)化控制、道路可變標(biāo)識(shí)控制等;不同物理實(shí)體之間,在車路協(xié)同這個(gè)復(fù)雜信息物理系統(tǒng)的全局調(diào)度下,呈現(xiàn)更加高效、更加秩序化的交通運(yùn)行態(tài)勢。
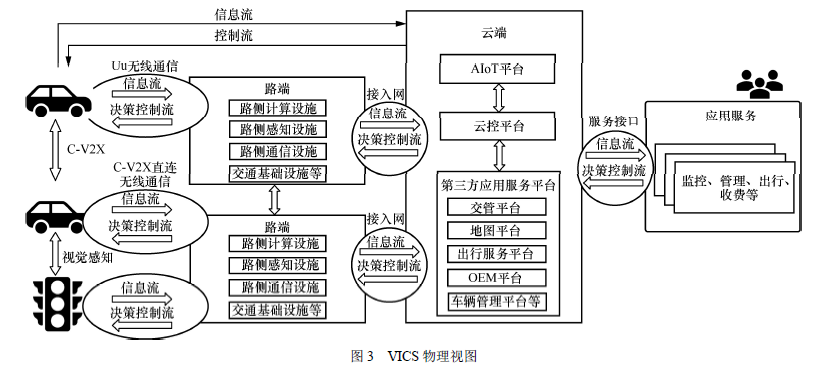
參考CPS 系統(tǒng)架構(gòu)以及美國合作式智能交通系統(tǒng)參考架構(gòu)設(shè)計(jì)(architecture reference for cooperative and intelligent transportation,ARC-IT),在VICS 模型的基礎(chǔ)上,可以得到VICS 的總體架構(gòu),包括物理視圖、通信視圖、功能視圖、產(chǎn)業(yè)視圖共4 個(gè)視圖,其中VICS 物理視圖如圖2 所示,包括3 個(gè)主要部分。
(1)車端子系統(tǒng)(vehicle):由車載單元(onboard unit,OBU)、車載計(jì)算控制模塊、車載網(wǎng)關(guān)和路由器等組成。
(2)路端子系統(tǒng)(infrastructure):包括路側(cè)通信設(shè)施、路側(cè)感知設(shè)施、路側(cè)計(jì)算設(shè)施等,也包括用于交通安全、交通管理、通信與定位的各類設(shè)備設(shè)施。
(3)云端子系統(tǒng)(cloud):包括云控平臺(tái)和相關(guān)第三方應(yīng)用服務(wù)平臺(tái),提供中心解密、中心交換、服務(wù)組件節(jié)點(diǎn)、服務(wù)路由器和中心接入節(jié)點(diǎn)等服務(wù),具備網(wǎng)絡(luò)管理、業(yè)務(wù)支撐和服務(wù)等能力。
需要說明的是,VICS 中的“V”是vehicle,包括不同網(wǎng)聯(lián)等級(jí)和自動(dòng)化程度的車輛,“I”是infrastructure,一般代指路端智能基礎(chǔ)設(shè)施及環(huán)境,包括但不限于:
● 道路工程及配套附屬設(shè)施(路面、道路標(biāo)志標(biāo)識(shí)、紅綠燈、照明、供電等設(shè)施);
● 智能感知設(shè)施(攝像頭、毫米波雷達(dá)、激光雷達(dá)等);
● 車路通信設(shè)施(直連無線通信設(shè)施、蜂窩移動(dòng)通信設(shè)施);
● 計(jì)算控制設(shè)施(路側(cè)邊緣計(jì)算節(jié)點(diǎn)、多接入邊緣云或各級(jí)云服務(wù)平臺(tái));
● 高精度地圖與輔助定位設(shè)施;
● 其他配套附屬設(shè)備設(shè)施(如供能、照明設(shè)施);
● 道路上承載的各類人員(如行人、施工人員、非機(jī)動(dòng)車駕駛員等)。
1.2 系統(tǒng)功能與性能要求
VICS 的技術(shù)要求主要體現(xiàn)在C-V2X 通信能力、感知定位能力(含地圖更新能力)、決策控制能力3 個(gè)方面。根據(jù)感知融合能力與應(yīng)用服務(wù)對(duì)象不同,VICS 的路端子系統(tǒng)分為3 類。
(1)I 類路端子系統(tǒng):可服務(wù)于具備0 級(jí)和1 級(jí)駕駛自動(dòng)化能力的智能網(wǎng)聯(lián)汽車,符合該等級(jí)的路端子系統(tǒng)應(yīng)可支撐相應(yīng)的數(shù)據(jù)統(tǒng)計(jì)與平臺(tái)管控類應(yīng)用。
(2)Ⅱ類路端子系統(tǒng):可服務(wù)于具備2 級(jí)和3 級(jí)駕駛自動(dòng)化能力的智能網(wǎng)聯(lián)汽車,符合該等級(jí)的路端子系統(tǒng)可向駕駛員提供實(shí)時(shí)道路信息、輔助駕駛員進(jìn)行現(xiàn)場決斷類的應(yīng)用。
(3)Ⅲ類路端子系統(tǒng):可服務(wù)于具備4 級(jí)及以上駕駛自動(dòng)化能力的智能網(wǎng)聯(lián)汽車,符合該等級(jí)的路端子系統(tǒng)應(yīng)可為自動(dòng)駕駛系統(tǒng)提供有價(jià)值的實(shí)時(shí)道路信息,支撐自動(dòng)駕駛系統(tǒng)進(jìn)行決策類的應(yīng)用。
下面重點(diǎn)對(duì)Ⅲ類路端子系統(tǒng)的相關(guān)能力進(jìn)行介紹。
(1)C-V2X 通信能力
綜合來看,與行業(yè)已經(jīng)發(fā)布的面向輔助駕駛的T/CSAE 53、T/CSAE 157 相關(guān)標(biāo)準(zhǔn)相比,面向高等級(jí)自動(dòng)駕駛的車路協(xié)同應(yīng)用場景對(duì)C-V2X 通信具有更高的要求,具體如下。
● 在移動(dòng)速度方面,系統(tǒng)應(yīng)能夠支持最高相對(duì)速度為500 km/h 的車輛間發(fā)送消息,以及絕對(duì)速度為250 km/h 的車輛與車輛、車輛與路側(cè)單元、車輛與行人發(fā)送消息。
● 在通信時(shí)延方面,對(duì)于支持車車和車人通信的終端,無論是直接發(fā)送還是由路側(cè)單元轉(zhuǎn)發(fā),最大通信時(shí)延應(yīng)不超過100 ms。對(duì)于特殊用例(如碰撞感知),車聯(lián)網(wǎng)終端間發(fā)送V2V 消息的最大時(shí)延宜不超過20 ms。對(duì)于車到路側(cè)單元的最大通信時(shí)延不超過100 ms。
● 在消息發(fā)送頻率方面,系統(tǒng)應(yīng)能夠支持路側(cè)單元和車聯(lián)網(wǎng)終端不低于10 Hz 的消息發(fā)送頻率。
● 在消息大小方面,不包括與安全相關(guān)的消息單元,對(duì)于周期性消息,兩個(gè)支持V2X應(yīng)用的用戶設(shè)備之間傳輸?shù)南⒋笮≡?0~300 byte;對(duì)于事件觸發(fā)的消息,其消息最大為1 200 byte。
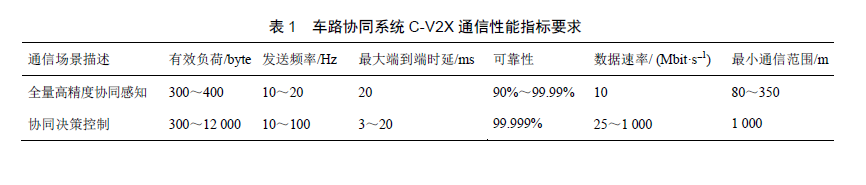
隨著網(wǎng)聯(lián)車輛的增多,未來對(duì)通信能力的要求將進(jìn)一步增強(qiáng)。車路協(xié)同系統(tǒng)C-V2X 通信性能指標(biāo)要求見表1,針對(duì)協(xié)同感知類場景和協(xié)同決策控制類場景,其中最小端到端時(shí)延要求為3 ms,可靠性最高為99.999%,直通鏈路數(shù)據(jù)速率最大為1 Gbit/s,上行數(shù)據(jù)速率最大為25 Mbit/s,負(fù)荷最大為12 000 byte,通信范圍最大為1 000 m。
(2)感知定位能力
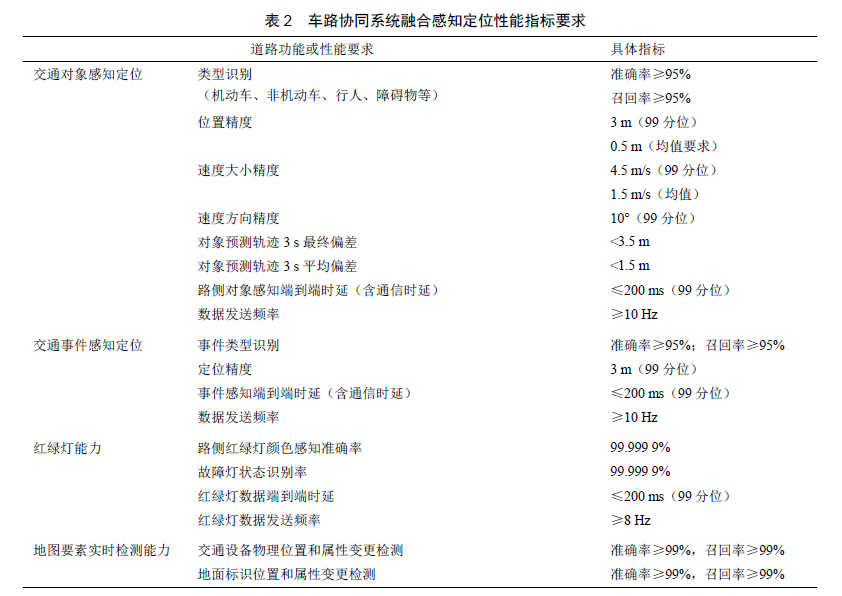
VICS Ⅲ類路端子系統(tǒng)的感知定位能力應(yīng)與L3 及以上等級(jí)自動(dòng)駕駛車輛對(duì)感知定位的要求相匹配,車路協(xié)同系統(tǒng)融合感知定位性能指標(biāo)要求見表2。
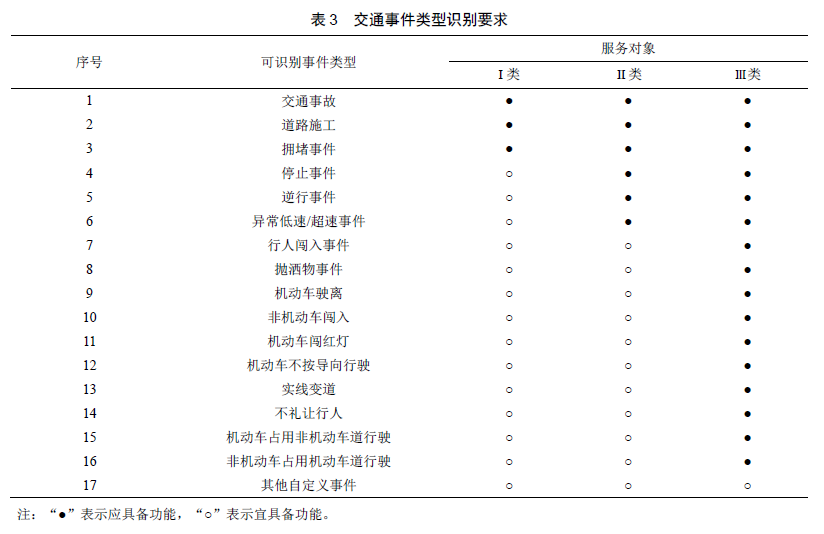
交通事件類型識(shí)別要求見表3,包括可支持識(shí)別的交通事件。
(3)決策控制能力
協(xié)同決策控制類場景需要VICS 具備相應(yīng)的軌跡預(yù)測能力、決策規(guī)劃能力和控制能力,這就要求在路側(cè)同時(shí)部署一套與車端智能駕駛系統(tǒng)(包括車載OS 與車控OS)適配兼容的路側(cè)智能駕駛系統(tǒng)(路側(cè)OS),且路側(cè)OS 需要更具開放兼容性,為不同類型、不同等級(jí)的車輛提供協(xié)同駕駛服務(wù),限于篇幅,本文暫不列出具體指標(biāo)。
2 車路協(xié)同自動(dòng)駕駛典型應(yīng)用場景與比較分析
2.1 應(yīng)用場景分類
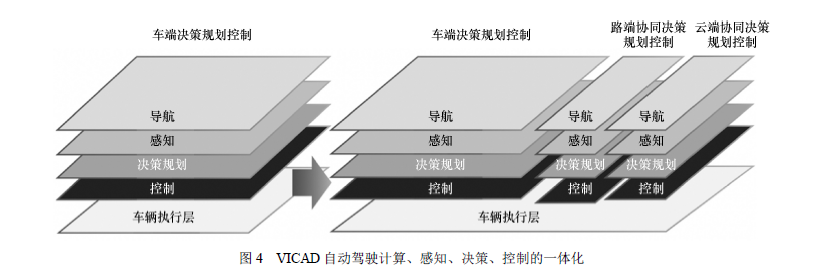
VICAD 最核心的特征是自動(dòng)駕駛計(jì)算、感知、決策、控制的一體化,如圖4 所示,在VICAD 模式下,車輛、路端或云端都可能承擔(dān)部分或全部“感知-決策-規(guī)劃-控制-執(zhí)行”功能,基于車路云一體化計(jì)算和互聯(lián),實(shí)現(xiàn)一體化感知、一體化決策規(guī)劃和一體化控制,其中一體化計(jì)算和互聯(lián)是關(guān)鍵基礎(chǔ),一體化感知與決策控制是核心應(yīng)用。
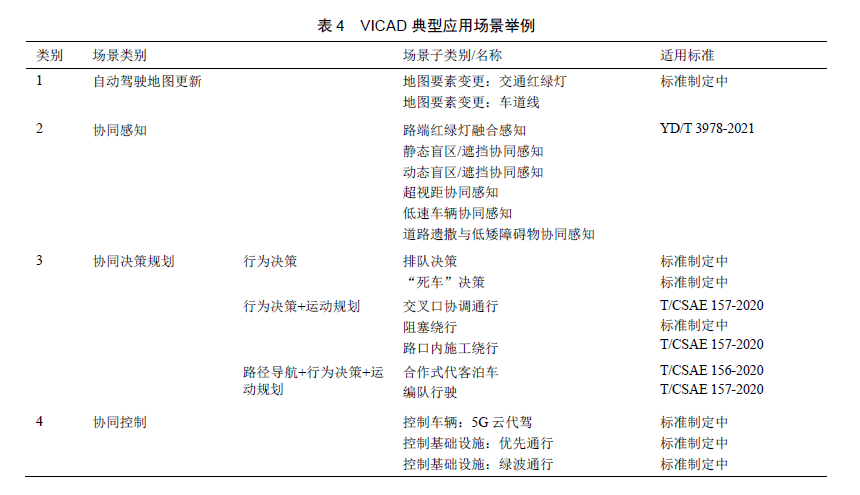
參考已經(jīng)發(fā)布的車路協(xié)同應(yīng)用場景相關(guān)標(biāo)準(zhǔn),國內(nèi)標(biāo)準(zhǔn)例如T/CSAE 53、T/CSAE 156、T/CSAE 157、T/CSAE 158,國外標(biāo)準(zhǔn)例如SAEJ2735、3GPP TS22.186、TR22.886,本文將VICAD應(yīng)用場景分為自動(dòng)駕駛地圖更新、協(xié)同感知、協(xié)同決策規(guī)劃與協(xié)同控制4 個(gè)大類18 個(gè)小類,VICAD 典型應(yīng)用場景舉例見表4。
2.2 自動(dòng)駕駛地圖實(shí)時(shí)更新類應(yīng)用場景
2.2.1 總體原理
自動(dòng)駕駛地圖(業(yè)界也稱為“高精度地圖”或“高清地圖”)是自動(dòng)駕駛的關(guān)鍵支撐要素之一,現(xiàn)階段自動(dòng)駕駛地圖比較常用的制圖以及更新的方式有兩種,一種是利用專業(yè)測繪設(shè)備進(jìn)行集中數(shù)據(jù)采集后制圖及更新,另一種是利用車載傳感器進(jìn)行眾包數(shù)據(jù)采集后制圖及更新。這兩種制圖和更新方式基本滿足高等級(jí)自動(dòng)駕駛的需求,但在地圖更新維護(hù)方面,存在難以解決的問題,具體如下。
(1)通過專業(yè)的高精度測繪設(shè)備更新:這種方式一般有人工制圖參與,所以可以對(duì)全要素的地圖進(jìn)行更新。但這種方式需要專業(yè)的采集設(shè)備,成本高、數(shù)量少,對(duì)于大范圍地圖的采集和制作更新成本高、周期長,難以滿足自動(dòng)駕駛對(duì)地圖實(shí)時(shí)更新的需求。
(2)眾包地圖更新:是指依賴量產(chǎn)車車端搭載的智能攝像頭或高級(jí)輔助駕駛系統(tǒng)的實(shí)時(shí)感知和定位能力,對(duì)交通環(huán)境進(jìn)行不定期的重復(fù)掃描,云端通過收集的采集數(shù)據(jù)在線成圖,并與底圖進(jìn)行差分,從而實(shí)現(xiàn)更新。眾包更新難以完全支撐高精度地圖的實(shí)時(shí)更新,主要原因如下。
● 在“車輛首次通過的天花板”,即現(xiàn)實(shí)道路變化后車輛首次經(jīng)過時(shí)的地圖失效問題。
● 產(chǎn)車車端算力、定位精度有限,需要采用一段時(shí)間內(nèi)的多次采集信息進(jìn)行聚合生成高置信度結(jié)果,然后進(jìn)行地圖更新。
● 端傳感器數(shù)據(jù)上傳至云端進(jìn)行建圖工作,過程中需要占用較大的通信資源,數(shù)據(jù)流量費(fèi)用較高,另外傳感器原始數(shù)據(jù)的公共網(wǎng)絡(luò)傳輸會(huì)對(duì)國家地理信息安全造成重大隱患。
高等級(jí)自動(dòng)駕駛對(duì)自動(dòng)駕駛地圖實(shí)時(shí)更新存在迫切需求,因?yàn)檐囕v在行駛過程中周圍環(huán)境是動(dòng)態(tài)變化的,比如道路結(jié)構(gòu)(封路、新建道路)、道路附屬設(shè)施(道路標(biāo)志標(biāo)線、標(biāo)志牌、交通紅綠燈等)或交通運(yùn)行狀況(交通管制、道路施工等),會(huì)造成車端地圖與現(xiàn)實(shí)交通環(huán)境存在不一致,影響自動(dòng)駕駛的正常運(yùn)行。
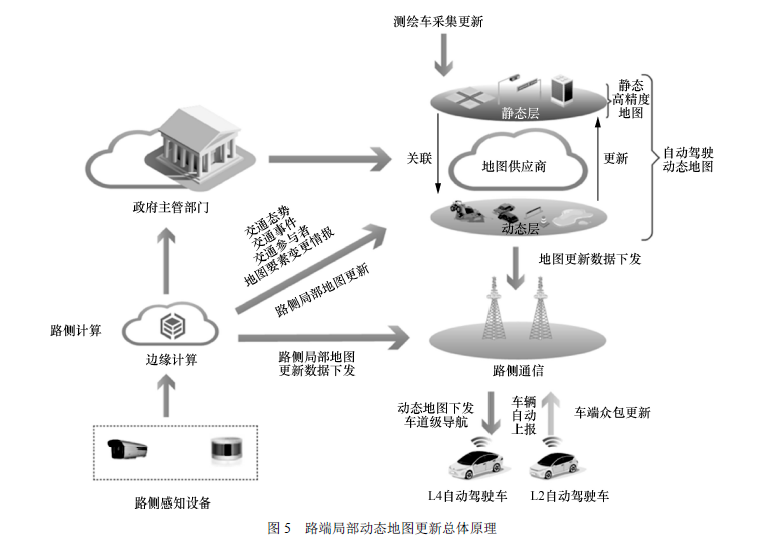
路端局部動(dòng)態(tài)地圖更新總體原理如圖5 所示,通過路端設(shè)施進(jìn)行高頻率的定點(diǎn)觀測,實(shí)時(shí)發(fā)現(xiàn)動(dòng)靜態(tài)地圖要素的變更情況,并更新覆蓋范圍內(nèi)的地圖,發(fā)送給車端和圖商,與當(dāng)前使用的地圖版本進(jìn)行要素級(jí)的融合更新。相較于專業(yè)測繪地圖更新和車端眾包地圖更新方式,路端局部動(dòng)態(tài)地圖更新有如下優(yōu)勢(3 種地圖更新方式比較見表5)。

● 點(diǎn)觀測數(shù)據(jù)精度高、可靠性強(qiáng):路端傳感器在安裝部署時(shí),可通過精確的內(nèi)外參標(biāo)定以及多傳感器融合感知定位,實(shí)現(xiàn)厘米級(jí)位置精度檢測。同時(shí)對(duì)于需要周期性觀測獲取的經(jīng)驗(yàn)類型的地圖數(shù)據(jù),路側(cè)作為定點(diǎn)連續(xù)觀測單元,更具有優(yōu)勢。
● 時(shí)性強(qiáng):利用路端毫秒級(jí)感知以及分鐘級(jí)地圖制作,為地圖分鐘級(jí)更新提供了保障支持,與傳統(tǒng)更新相比,具有明顯優(yōu)勢。
● 識(shí)別的地圖動(dòng)靜態(tài)要素信息豐富:路端不僅可以識(shí)別重要的靜態(tài)和半靜態(tài)地圖要素信息,還可以識(shí)別半動(dòng)態(tài)、動(dòng)態(tài)的地圖要素信息。
2.2.2 車智能自動(dòng)駕駛比較分析
下面以常見的紅綠燈變更和車道線變更為例進(jìn)行說明。通過對(duì)多個(gè)智能網(wǎng)聯(lián)示范區(qū)的長期觀測統(tǒng)計(jì),可知自動(dòng)駕駛車輛在實(shí)際道路行駛時(shí),會(huì)有較高概率遇到道路現(xiàn)實(shí)變更場景(例如道路紅綠燈、車道線、標(biāo)志標(biāo)牌等),遭遇道路現(xiàn)實(shí)變更的次數(shù) 約為6.38 次/萬千米(其中紅綠燈變更次數(shù)為5.5 次/萬千米,車道線變更次數(shù)為0.78 次/萬千米,其他為0.1 次/萬千米),這類場景會(huì)直接影響自動(dòng)駕駛車輛的安全運(yùn)營,需要通過有效手段快速解決。下面對(duì)車端眾包地圖更新和路端局部動(dòng)態(tài)地圖更新兩種典型地圖更新模式進(jìn)行比較分析。
約為6.38 次/萬千米(其中紅綠燈變更次數(shù)為5.5 次/萬千米,車道線變更次數(shù)為0.78 次/萬千米,其他為0.1 次/萬千米),這類場景會(huì)直接影響自動(dòng)駕駛車輛的安全運(yùn)營,需要通過有效手段快速解決。下面對(duì)車端眾包地圖更新和路端局部動(dòng)態(tài)地圖更新兩種典型地圖更新模式進(jìn)行比較分析。
(1)車端眾包地圖更新模式
在車端眾包地圖更新模式下,地圖完成現(xiàn)實(shí)變更的更新時(shí)間 ,由于需要積累多趟、多車道數(shù)據(jù)才能完整重建,一般需要天級(jí)別(≥24 h)的數(shù)據(jù)積累,云端才能完成地圖的更新下發(fā),因此在眾包地圖更新模式下可定義地圖更新周期
,由于需要積累多趟、多車道數(shù)據(jù)才能完整重建,一般需要天級(jí)別(≥24 h)的數(shù)據(jù)積累,云端才能完成地圖的更新下發(fā),因此在眾包地圖更新模式下可定義地圖更新周期 ,假設(shè)自動(dòng)駕駛車輛每天的運(yùn)營時(shí)間
,假設(shè)自動(dòng)駕駛車輛每天的運(yùn)營時(shí)間 。
。
那么,該模式下遭遇地圖要素變更場景的概率通過長時(shí)間的運(yùn)營觀測可以從兩個(gè)層面得出:
單車每萬千米里程遭遇該場景的概率: =6.38次/萬千米 ,單車每天遭遇該場景的概率:
=6.38次/萬千米 ,單車每天遭遇該場景的概率: =1.7次/ (車·天)。
=1.7次/ (車·天)。
該模式下車輛遭遇地圖要素變更場景的通過成功率僅依賴于單車的能力,定義地圖要素變更場景通過成功率為 ,
, 變更的具體值應(yīng)結(jié)合車輛的實(shí)際能力,并由大量實(shí)測結(jié)果確定。
變更的具體值應(yīng)結(jié)合車輛的實(shí)際能力,并由大量實(shí)測結(jié)果確定。
(2)路端局部動(dòng)態(tài)地圖更新模式
依靠路端感知優(yōu)勢,道路交通要素在變更完成后,可在云端短時(shí)間內(nèi)完成地圖重建和車端更新,將總的更新時(shí)間定義為 ,保守按5 min計(jì)算,那么
,保守按5 min計(jì)算,那么 。
。
同時(shí),假設(shè)通過車路協(xié)同感知實(shí)現(xiàn)地圖更新的場景召回率 。
。
那么該地圖更新模式下自動(dòng)駕駛車輛遇到變更場景的遭遇率 為:
為:

其中:

該地圖更新模式下自動(dòng)駕駛車輛場景遭遇概率 為:
為:

場景成功率方面,運(yùn)營時(shí)間內(nèi)發(fā)生一次地圖要素現(xiàn)實(shí)變更時(shí),若地圖要素變更場景發(fā)生在 時(shí)刻,有車輛在
時(shí)刻,有車輛在 時(shí)刻途經(jīng)該點(diǎn),則在
時(shí)刻途經(jīng)該點(diǎn),則在 至
至 時(shí)間窗口內(nèi),車輛受到場景的環(huán)境影響,通過成功率
時(shí)間窗口內(nèi),車輛受到場景的環(huán)境影響,通過成功率 ,在時(shí)間窗口前,車輛通過成功率為
,在時(shí)間窗口前,車輛通過成功率為 ,時(shí)間窗口后車輛若完成更新,成功率恢復(fù)為
,時(shí)間窗口后車輛若完成更新,成功率恢復(fù)為 ,那么:
,那么:
引入路端局部動(dòng)態(tài)地圖更新后的場景通過率:
由于 ,可得:
,可得:
根據(jù)自動(dòng)駕駛車輛的測量和運(yùn)營數(shù)據(jù),可以進(jìn)一步計(jì)算得出以下幾點(diǎn)。
● 假設(shè)AD 模式下地圖要素變更場景通過成功率 ,路端局部動(dòng)態(tài)地圖更新模式下變更場景召回率
,路端局部動(dòng)態(tài)地圖更新模式下變更場景召回率 ,可得
,可得 。
。
● 假設(shè)AD 模式下地圖要素變更場景通過成功率 ,路端局部動(dòng)態(tài)地圖更新模式下變更場景召回率
,路端局部動(dòng)態(tài)地圖更新模式下變更場景召回率 ,可得
,可得 。
。
(3)收益評(píng)估分析
綜上所述,路端局部地圖更新模式具有顯著收益,地圖要素變更場景下VICAD 收益分析見表6,具體如下。
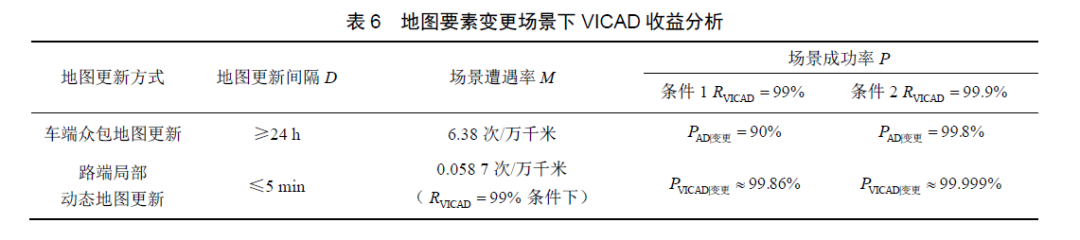
● 地圖更新時(shí)間方面: 小于或等于5 min時(shí),地圖更新時(shí)間大幅縮短。
小于或等于5 min時(shí),地圖更新時(shí)間大幅縮短。
● 地圖要素變更場景的遭遇概率明顯降低: 的情況下,場景遭遇率可從6.38 次/萬千米降低至0.058 7 次/萬千米。
的情況下,場景遭遇率可從6.38 次/萬千米降低至0.058 7 次/萬千米。
● 場景通過成功率 得到顯著提升:在
得到顯著提升:在 、
、 的情況下,
的情況下, 變更甚至可達(dá)到理想的99.999%,場景的失敗率從1.26 次/百萬千米降低到0.006 3 次/百萬千米。
變更甚至可達(dá)到理想的99.999%,場景的失敗率從1.26 次/百萬千米降低到0.006 3 次/百萬千米。
2.3 協(xié)同感知類應(yīng)用場景
2.3.1 總體原理
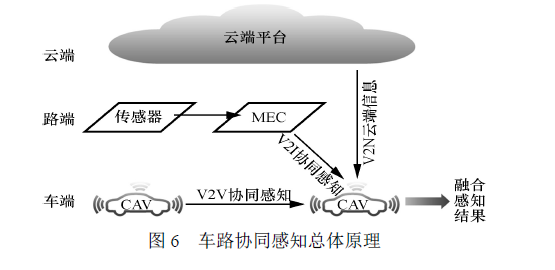
單車智能自動(dòng)駕駛車輛(autonomous vehicle,AV)受限于傳感器的感知距離、感知角度、感知時(shí)長等因素,較難對(duì)動(dòng)靜態(tài)盲區(qū)/遮擋、超視距等場景的交通參與者進(jìn)行準(zhǔn)確識(shí)別、定位和預(yù)測。通過路側(cè)多傳感器部署和路側(cè)融合感知定位,可實(shí)現(xiàn)多方位、長距離連續(xù)檢測識(shí)別,并利用V2X技術(shù)將路側(cè)感知結(jié)果共享發(fā)送到網(wǎng)聯(lián)自動(dòng)駕駛車輛(connected autonomous vehicle,CAV),與主車感知進(jìn)行融合,輔助自動(dòng)駕駛車輛對(duì)盲區(qū)和超視距范圍內(nèi)車輛或行人的準(zhǔn)確感知識(shí)別,CAV 車輛可提前做出預(yù)判和決策控制,避免急剎或出現(xiàn)交通事故。車路協(xié)同感知總體原理如圖6 所示。
2.3.2 紅綠燈場景舉例
根據(jù)感知對(duì)象的差異,可以將協(xié)同感知類應(yīng)用場景分為交通參與者協(xié)同感知、交通事件協(xié)同感知和紅綠燈協(xié)同感知3 類,其中交通參與者協(xié)同感知與交通事件協(xié)同感知可參見T/CSAE 53 和T/CSAE 157 標(biāo)準(zhǔn),紅綠燈協(xié)同感知場景中,單車智能主要通過視覺智能獲取,但仍存在很多不足:
● 識(shí)別紅綠燈能力有限,異形紅綠燈無法識(shí)別;
● 車端視角限制,容易被前車遮擋;
● 容易受外界環(huán)境限制,尤其是逆光、霧天、
揚(yáng)塵、夜晚等環(huán)境;
● 識(shí)別的數(shù)據(jù)維度有限,倒計(jì)時(shí)信息識(shí)別不準(zhǔn)。
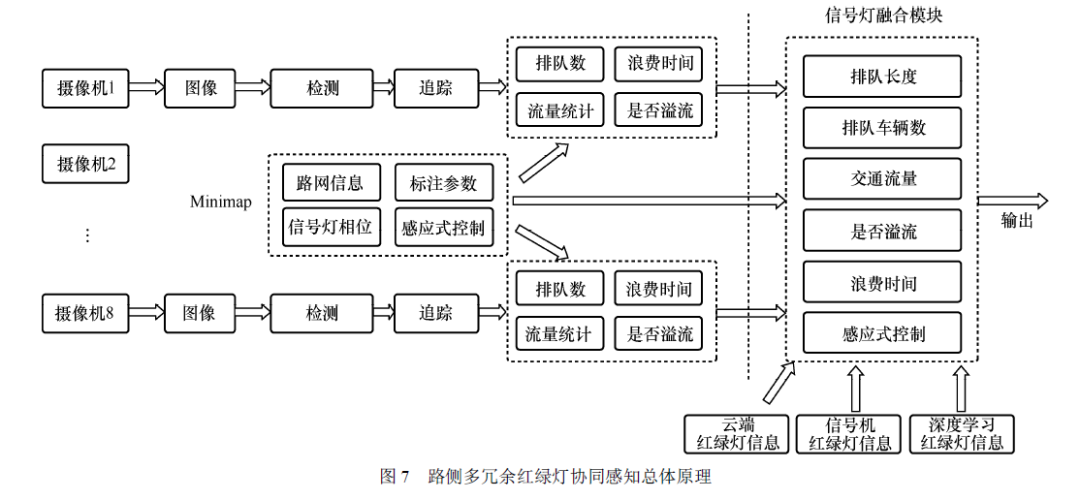
路側(cè)多冗余紅綠燈協(xié)同感知總體原理如圖7所示,主要通過物聯(lián)網(wǎng)紅綠燈數(shù)據(jù)接入、路側(cè)多視覺融合感知等技術(shù)獲取紅綠燈燈色和倒計(jì)時(shí)信息,經(jīng)數(shù)據(jù)融合處理后,通過車路協(xié)同技術(shù)發(fā)給自動(dòng)駕駛車輛。車路協(xié)同自動(dòng)駕駛紅綠燈協(xié)同感知的優(yōu)勢:
● 獲取方式不受燈的外觀、環(huán)境影響;
● 獲取到的數(shù)據(jù)內(nèi)容豐富(包括燈色、倒計(jì)時(shí));
● 車輛可在很遠(yuǎn)的距離提前獲取信息,提前進(jìn)行決策控制。
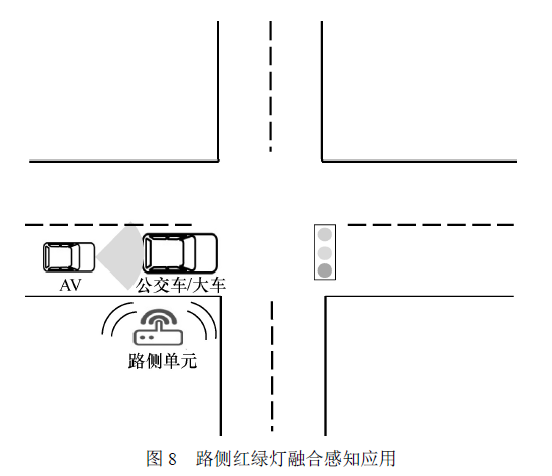
以路口前方大車遮擋紅綠燈場景為例,可通過車路協(xié)同自動(dòng)駕駛紅綠燈協(xié)同感知實(shí)時(shí)獲取準(zhǔn)確的路口紅綠燈燈色和倒計(jì)時(shí)數(shù)據(jù),并通過V2X將紅綠燈數(shù)據(jù)發(fā)送給路口所有車輛,以便車輛提前做出預(yù)判和決策控制,避免出現(xiàn)闖紅燈或者急剎。路側(cè)紅綠燈融合感知應(yīng)用如圖8 所示。
2.4 車路協(xié)同決策控制類應(yīng)用
2.4.1 車路協(xié)同決策規(guī)劃
在車路協(xié)同感知的基礎(chǔ)上,路側(cè)設(shè)施或系統(tǒng)還可以具備協(xié)同決策規(guī)劃能力,進(jìn)一步保障自動(dòng)駕駛安全,提高交通通行效率。車路協(xié)同決策規(guī)劃總體原理如圖9 所示,當(dāng)車端決策規(guī)劃能力不可用時(shí),由路端或云端為自動(dòng)駕駛車輛提供決策規(guī)劃服務(wù)。
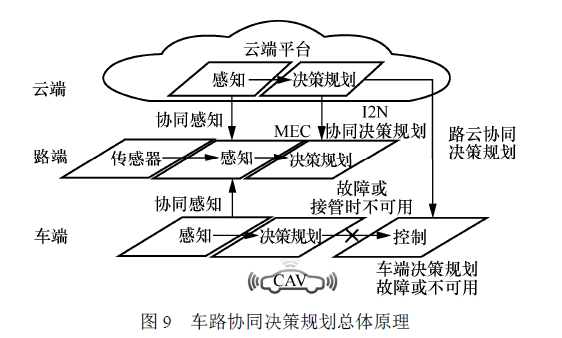
根據(jù)自動(dòng)駕駛系統(tǒng)總體架構(gòu),車路協(xié)同決策規(guī)劃可以分為協(xié)同路徑規(guī)劃(routing)、協(xié)同行為決策(decision)和協(xié)同運(yùn)動(dòng)規(guī)劃(planning)3 個(gè)子過程。
下面以道路施工阻塞接管場景為例展開進(jìn)行介紹。道路施工、交通事故、交通管制等交通事件是自動(dòng)駕駛車輛經(jīng)常遇到且較難應(yīng)對(duì)的一類場景,尤其是在一些復(fù)雜的道路施工(如路口內(nèi)施工、占據(jù)所有行進(jìn)方向車道的施工)場景中,僅依靠車路協(xié)同感知或動(dòng)態(tài)地圖更新也不能成功克服,容易造成車輛停滯或接管,存在安全風(fēng)險(xiǎn)。針對(duì)施工場景,車路協(xié)同具體有動(dòng)態(tài)路徑規(guī)劃、協(xié)同行為決策、協(xié)同運(yùn)動(dòng)規(guī)劃3 種應(yīng)對(duì)解決方式。
(1)協(xié)同路徑規(guī)劃
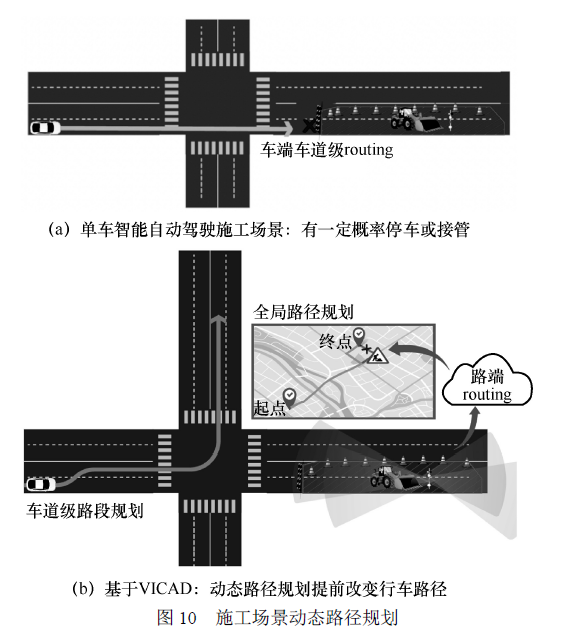
施工場景動(dòng)態(tài)路徑規(guī)劃如圖10 所示,路端可以識(shí)別施工信息并發(fā)送到地圖平臺(tái),發(fā)送的信息包括但不限于事件類型、時(shí)間地點(diǎn)、影響范圍、影響時(shí)間等,通過車路協(xié)同路徑規(guī)劃,可以評(píng)估車輛的可通過性,若不能通過或難度較大,可重新為車輛規(guī)劃路徑,提前避開施工路段。具體實(shí)現(xiàn)流程如下:
① 車輛設(shè)置目的地后,路徑規(guī)劃模塊根據(jù)道路拓?fù)潢P(guān)系和道路擁堵情況構(gòu)建全局路徑規(guī)劃,車輛按照路徑規(guī)劃行駛;
② 路端檢測到占道施工,同步該信息至云端,通過自動(dòng)和人工的方式及時(shí)更新路網(wǎng)拓?fù)潢P(guān)系;若判斷車輛無法通行,重新對(duì)車輛進(jìn)行全局路徑規(guī)劃,提前繞開施工區(qū)域所在路段。
(2)協(xié)同行為決策+運(yùn)動(dòng)規(guī)劃
在車路協(xié)同路徑規(guī)劃部分,針對(duì)施工場景給出了通過提前改變車輛行進(jìn)路徑的解決方式;如果車輛必須保持直行,則需要在車路協(xié)同路徑規(guī)劃的基礎(chǔ)上,進(jìn)一步從車路協(xié)同決策規(guī)劃的角度解決施工阻塞問題,具體流程如下。
① 通過車路協(xié)同感知,對(duì)道路阻塞區(qū)域、阻塞原因、阻塞可達(dá)性等進(jìn)行識(shí)別,對(duì)雙向車流進(jìn)行實(shí)時(shí)持續(xù)性觀測,獲取阻塞區(qū)域周邊車流軌跡,結(jié)合對(duì)道路交通態(tài)勢的判斷,識(shí)別本側(cè)道路已經(jīng)無法通行,但是對(duì)側(cè)道路最內(nèi)側(cè)車道臨時(shí)變更行駛方向,作為本側(cè)方向的車道。
② 路端發(fā)現(xiàn)車道可通行方向和連接關(guān)系變更后,更新局部區(qū)域的道路拓?fù)鋽?shù)據(jù)。
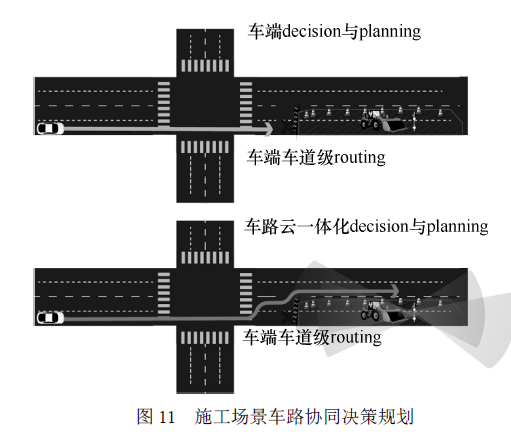
③ 車輛到達(dá)施工區(qū)域前,獲取新的局部路網(wǎng)拓?fù)洌匦聦?duì)車輛進(jìn)行局部路徑規(guī)劃,借用對(duì)向道路通過施工區(qū)域所在路段,施工場景車路協(xié)同決策規(guī)劃如圖11 所示。
2.4.2 車路協(xié)同控制
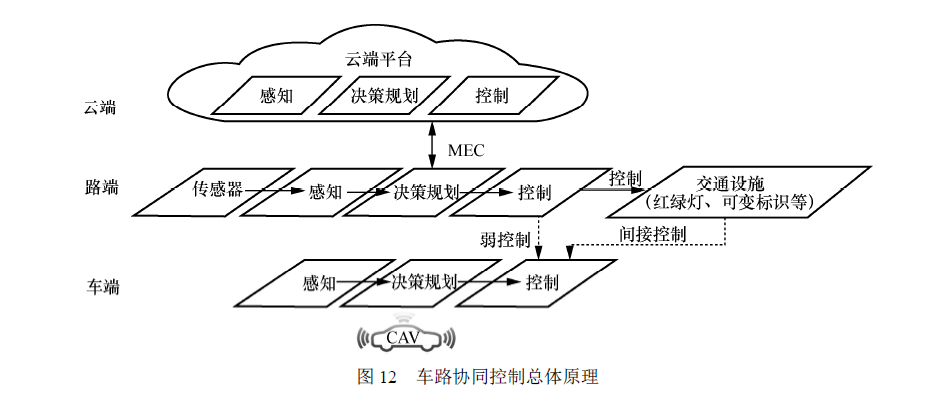
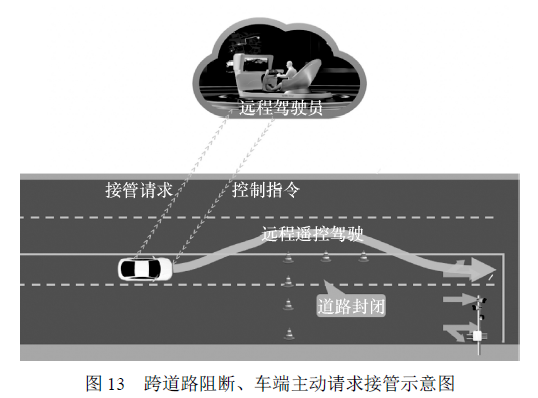
當(dāng)自動(dòng)駕駛車輛駛?cè)霃?fù)雜交通環(huán)境、駛出地理圍欄、面臨復(fù)雜認(rèn)知交互類場景或極端場景時(shí),車輛較難獨(dú)立應(yīng)對(duì),還可以通過車路協(xié)同控制幫助車輛脫困,車路協(xié)同控制總體原理如圖12 所示。仍以道路施工接管場景為例,跨道路阻斷、車端主動(dòng)請(qǐng)求接管示意圖如圖13 所示,車輛阻塞主動(dòng)請(qǐng)求接管的流程如下:
(1)車端遇道路阻塞,向云端發(fā)起接管請(qǐng)求;
(2)云端遠(yuǎn)程遙控駕駛員接到車輛的脫困或代駕請(qǐng)求;
(3)車端/路端各類實(shí)時(shí)數(shù)據(jù)同步上傳云端,云端遠(yuǎn)程遙控駕駛員通過信息顯示屏上的信息進(jìn)行人工決策;
(4)遠(yuǎn)程遙控駕駛員控制駕駛艙的方向盤、油門、剎車等,給車端下發(fā)控制指令;
(5)車輛執(zhí)行遠(yuǎn)程駕駛的控制指令,脫困。
2.4.3 與單車智能自動(dòng)駕駛比較分析
基于上述道路施工場景案例,下面分別對(duì)基于AD的單車決策規(guī)劃和基于VICAD的車路協(xié)同決策規(guī)劃兩種模式進(jìn)行量化比較分析。
(1)基于AD 的單車決策規(guī)劃
根據(jù)長期實(shí)測統(tǒng)計(jì),自動(dòng)駕駛車輛的施工事件場景遭遇率 ?為4.5 次/萬千米,同時(shí)定義,AD 模式下自動(dòng)駕駛地圖更新(場景召回)時(shí)長
?為4.5 次/萬千米,同時(shí)定義,AD 模式下自動(dòng)駕駛地圖更新(場景召回)時(shí)長 ;自 動(dòng) 駕 駛 車 輛 每 日 運(yùn) 營 時(shí) 長
;自 動(dòng) 駕 駛 車 輛 每 日 運(yùn) 營 時(shí) 長 ;單車智能自動(dòng)駕駛遇該類場景的成功率為
;單車智能自動(dòng)駕駛遇該類場景的成功率為 (的值可根據(jù)實(shí)測數(shù)據(jù)獲得)。
(的值可根據(jù)實(shí)測數(shù)據(jù)獲得)。
(2)基于VICAD 的車路協(xié)同決策規(guī)劃
依靠路端和云端協(xié)同感知和協(xié)同決策規(guī)劃,可在較短時(shí)間內(nèi)完成施工事件的精準(zhǔn)識(shí)別和決策規(guī)劃,并下發(fā)到車端,保守起見,將整個(gè)鏈路的時(shí)間定為3 min,那么, = 3min 。3 min 時(shí)間周期的情況下,施工事件場景的召回率可做到:
= 3min 。3 min 時(shí)間周期的情況下,施工事件場景的召回率可做到: 。
。
車路協(xié)同決策規(guī)劃模式下可以通過多種方式幫助自動(dòng)駕駛車輛避免遭遇施工事件,比如routing、decision 和planning,那么該模式下施工事件的場景遭遇率為:
場景成功率方面,假設(shè)施工時(shí)長服從對(duì)數(shù)正態(tài)分布: ,對(duì)于運(yùn)營時(shí)間內(nèi)發(fā)生的一次場景,若場景發(fā)生在
,對(duì)于運(yùn)營時(shí)間內(nèi)發(fā)生的一次場景,若場景發(fā)生在 時(shí)刻,持續(xù)時(shí)長分布
時(shí)刻,持續(xù)時(shí)長分布 ,有車輛在
,有車輛在 時(shí)刻途徑該點(diǎn),則在
時(shí)刻途徑該點(diǎn),則在 至
至 ,
, 時(shí)間窗口內(nèi),車輛受到場景的環(huán)境影響,通過成功率為
時(shí)間窗口內(nèi),車輛受到場景的環(huán)境影響,通過成功率為 ,時(shí)間窗口后若施工持續(xù)且完成召回,成功率為|
,時(shí)間窗口后若施工持續(xù)且完成召回,成功率為| ,其余時(shí)間車輛通過成功率為:
,其余時(shí)間車輛通過成功率為:
引入車路協(xié)同決策規(guī)劃后的場景通過率:
由于 ,可得:
,可得:
若單車場景通過成功率 ,車路協(xié)同決策規(guī)劃模式下場景召回率
,車路協(xié)同決策規(guī)劃模式下場景召回率 ,可得
,可得 。
。
若單車場景通過成功率 ,邊緣計(jì)算場景召回率
,邊緣計(jì)算場景召回率 , 可 得
, 可 得 。
。
(3)收益評(píng)估分析:
綜上所述,通過車路協(xié)同決策規(guī)劃對(duì)自動(dòng)駕駛具有顯著收益,施工場景下VICAD 收益分析見表7,具體如下。
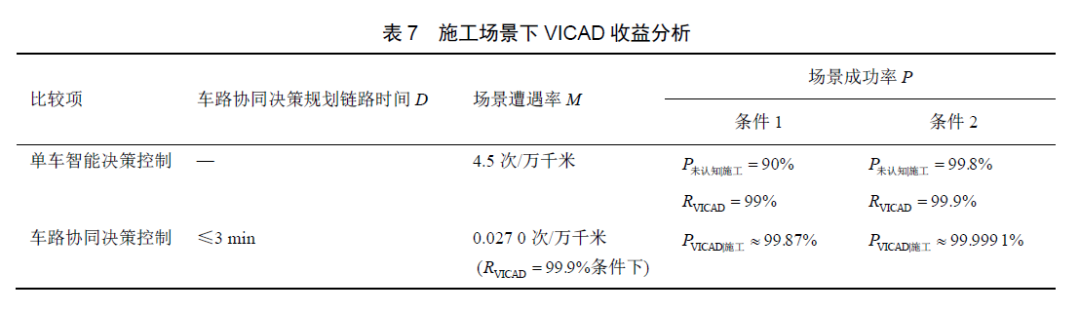
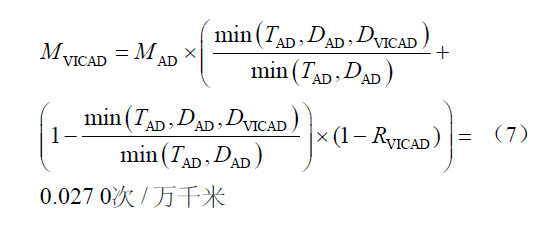
● 車輛場景的遭遇概率明顯降低:通過車路協(xié)同routing、decision 和planning 等,可以多種方式避免車輛遭遇施工類場景,在 情況下,場景遭遇率可從4.5 次/萬千米降低至0.027 0 次/萬千米。
情況下,場景遭遇率可從4.5 次/萬千米降低至0.027 0 次/萬千米。
● 車輛場景通過成功率P 得到顯著提升:在 、邊緣計(jì)算場景召回率
、邊緣計(jì)算場景召回率 情況下,
情況下, 可達(dá)到理想的99.999 1%,場景的失敗率從0.9 次/百萬千米降低到0.004 05 次/百萬千米。
可達(dá)到理想的99.999 1%,場景的失敗率從0.9 次/百萬千米降低到0.004 05 次/百萬千米。
3 結(jié)束語
本文簡述了面向高等級(jí)自動(dòng)駕駛車輛的車路協(xié)同應(yīng)用場景需求,并對(duì)車路協(xié)同系統(tǒng)進(jìn)行了系統(tǒng)分析,可以為下一階段車路協(xié)同應(yīng)用的發(fā)展和自動(dòng)駕駛的規(guī)模商業(yè)化落地提供參考和解決思路。
但車路協(xié)同自動(dòng)駕駛規(guī)模商業(yè)化落地是一個(gè)循序漸進(jìn)、由局部到全面逐漸發(fā)展的過程:首先,需要實(shí)現(xiàn)關(guān)鍵技術(shù)的進(jìn)一步突破,如車路協(xié)同系統(tǒng)、車路高效通信(NR-V2X)、云控平臺(tái)等;其次,智能車輛的滲透率和智能道路覆蓋率需要達(dá)到一定水平,實(shí)現(xiàn)車路協(xié)同系統(tǒng)的全面覆蓋和廣域服務(wù);最后,需要在政策法規(guī)和技術(shù)標(biāo)準(zhǔn)方面提供足夠的保障支持,例如高精度地圖與定位、車聯(lián)網(wǎng)數(shù)據(jù)安全等方面。
審核編輯:湯梓紅
-
車聯(lián)網(wǎng)
+關(guān)注
關(guān)注
76文章
2606瀏覽量
91795 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
785文章
13929瀏覽量
167000 -
智能網(wǎng)聯(lián)汽車
+關(guān)注
關(guān)注
9文章
1095瀏覽量
31152 -
C-V2X
+關(guān)注
關(guān)注
2文章
113瀏覽量
13231
原文標(biāo)題:基于C-V2X 的車路協(xié)同自動(dòng)駕駛關(guān)鍵技術(shù)與應(yīng)用
文章出處:【微信號(hào):阿寶1990,微信公眾號(hào):阿寶1990】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
Qualcomm發(fā)布突破性C-V2X車聯(lián)網(wǎng)解決方案 支持汽車道路安全為未來自動(dòng)駕駛鋪平道路
為何自動(dòng)駕駛需要5G?
車聯(lián)網(wǎng)的關(guān)鍵技術(shù)和Qorvo的解決方案
網(wǎng)聯(lián)化自動(dòng)駕駛的含義及發(fā)展方向
5分鐘成為車聯(lián)網(wǎng)專家|如何實(shí)現(xiàn)C-V2X技術(shù)突破把住車聯(lián)網(wǎng)發(fā)展命門 精選資料分享
自動(dòng)駕駛及關(guān)鍵技術(shù)V2X研究
基于C-V2X實(shí)現(xiàn)“聰明的車”+“智慧的路”方式實(shí)現(xiàn)智能交通和自動(dòng)駕駛
C-V2X車路協(xié)同是實(shí)現(xiàn)自動(dòng)駕駛與智慧交通的關(guān)鍵技術(shù)
5G車路協(xié)同自動(dòng)駕駛概述
5G車路協(xié)同自動(dòng)駕駛概述與應(yīng)用
車路協(xié)同自動(dòng)駕駛數(shù)據(jù)集DAIR-V2X

萬集激光基于車路協(xié)同的自動(dòng)駕駛方案亮相
C-V2X安全證書:保障車路云系統(tǒng)通信安全的關(guān)鍵

V2X車路協(xié)同系統(tǒng)

V2X車路協(xié)同系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論