 CAN L與CAN H導線相互反接
CAN L與CAN H導線相互反接
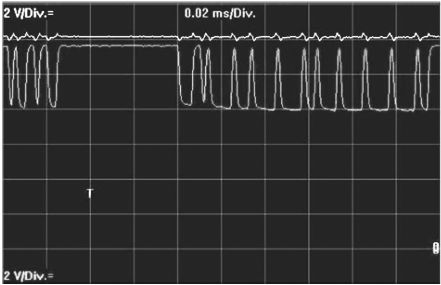
當出現CAN L 與CAN H 導線互相接反這種故障時,一般情況下,接錯的那個控制模塊將無法通信,其他控制模塊的通信則正常。CAN L 與CAN H導線互相接反的示意圖如下圖所示。
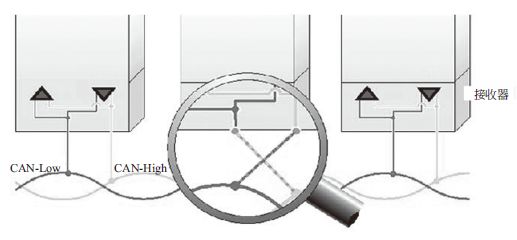
在懷疑有問題的控制模塊的CAN導線針腳處測量其電壓,驗證電壓是否正常。結合CAN網絡圖核對線路連接情況進行檢查,判斷是否存在這種故障。若存在,則對CAN網絡進行修復。替換有故障碼內容涉及的控制模塊,判斷故障是否是由該控制模塊造成的。
CAN L 斷路
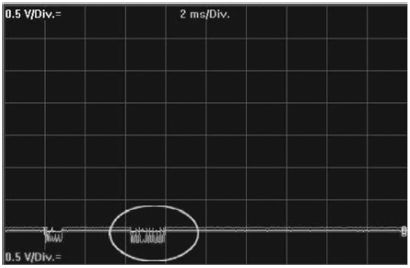
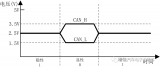
當某個控制模塊CAN L導線斷路時,會導致該控制模塊無法實現通信,但其他控制模塊的通信還是有的。在其他控制模塊可能讀到此故障模塊的故障碼。如果多個控制模塊的CAN L導線出現斷路,那么這些控制模塊的通信功能都會受到影響。
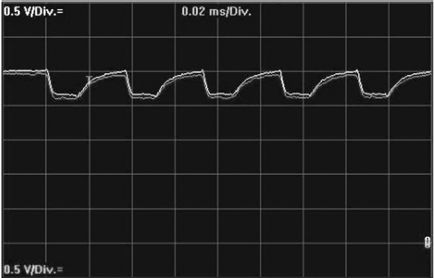
如果出現故障的控制模塊帶有終端電阻,可以用電阻測量法來判斷。測量診斷接口的CAN H 與CAN L
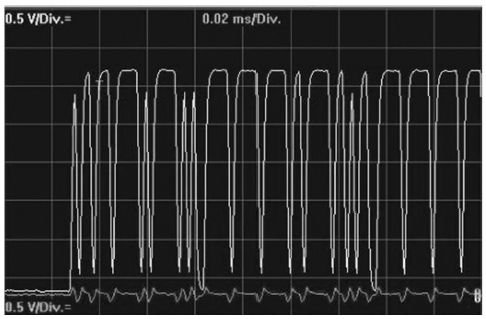
之間的電阻,若變為120Ω,則說明有一個終端電阻斷路。如果出現故障的控制模塊不帶終端電阻,那么需要測量該控制模塊的CAN導線的導通性。CAN L斷路的總線波形如下圖所示。

替換有故障碼內容涉及的控制模塊,可以快速判斷故障是否是由該控制模塊本身造成的。此外,要結合網絡圖來查找斷點,從而準確找到原因,排除故障。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
汽車電子
+關注
關注
3029文章
8023瀏覽量
167811 -
導線
+關注
關注
5文章
412瀏覽量
24863 -
CAN
+關注
關注
57文章
2769瀏覽量
464385 -
總線
+關注
關注
10文章
2903瀏覽量
88394
發布評論請先 登錄
相關推薦
CAN總線的概念是什么?CAN總線通信有什么解密方法?
CAN高(CAN H )和CAN低(CAN L),當線路受到共模干擾之后,信號差值不變,信號依然
發表于 07-23 12:20
?1.7w次閱讀
如何使用CAN總線中繼模塊進行CAN總線節點擴容的實現案例概述
用戶在使用CAN總線通信時,一般只需要接CAN_H和CAN_L兩根導線。但是導線畢竟都多少有些內阻,因此在使用
高速CAN總線和低速CAN總線區別分析
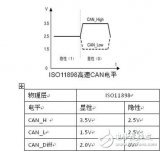
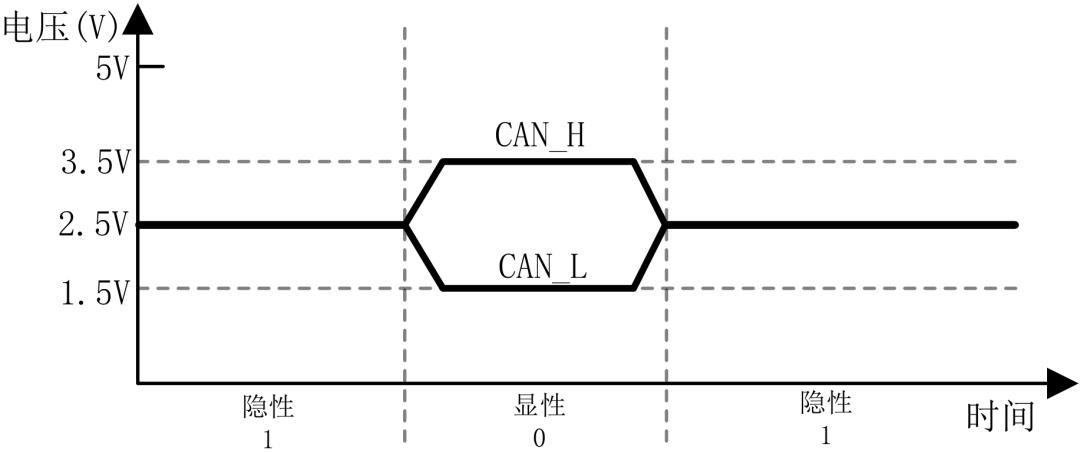
高速CAN總線上為顯性電平(邏輯0)時,CAN_H為3.5V、CAN_L為1.5V,此時電壓差是2V,顯性狀態的CAN總線電壓范圍。
高速CAN
發表于 09-13 16:57
?4881次閱讀
CAN總線詳解
CAN總線網絡主要掛在CAN_H和CAN_L,各個節點通過這兩條線實現信號的串行差分傳輸,為了避免信號的反射和干擾,還需要在CAN_H和CAN_L
CAN電氣特性屬性
CAN 電氣屬性 CAN 總線使用兩根線來連接各個單元:CAN_H 和 CAN_L,CAN 控制器通過判斷這兩根線上的電位差來得到總線電平,
CAN通信針腳定義 can通信和串口通信區別在哪
CAN線上的兩根線分別是CAN_H和CAN_L,它們攜帶著差分信號。CAN_H線上的電壓值高于CAN_L線時,表示傳輸的是高電平信號;
can總線是單線還是雙線 can總線通訊最少需要幾根線
CAN總線通常由兩根線組成:CAN-High(CAN-H)和CAN-Low(CAN-L),也稱為CAN-
發表于 09-12 14:59
?1w次閱讀
CAN H對電源(正極)短路故障如何解決
電壓電位被置于12V,CAN L 線的隱性電壓被置于大約12V。CAN H對電源短路的總線波形如下圖所示。 實際測量電壓,若CAN
CAN L對地短路總線波形
夠正常使用,即在客戶體驗層面上沒有明顯的異常現象,但從診斷方面來講,會影響網絡傳輸速度。 此時CAN L 電壓約為0V。CAN H 線的隱性電壓被降至0V,但顯性電壓基本不變,因此波形
CAN電氣特性屬性
顯性電平表示邏輯“0”,此時 CAN_H 電平比 CAN_L 高,分別為 3.5V 和 1.5V,電位差為2V。隱形電平表示邏輯“1”,此時 CAN_H 和 CAN_L 電壓都為 2.






 工商網監
工商網監
評論