") 步進電機驅(qū)動電壓、角度、代碼舉例
步進電機驅(qū)動電壓、角度、代碼舉例
以下是一些步進電機驅(qū)動電壓、角度和代碼舉例的相關(guān)信息。
驅(qū)動電壓:一般來說,步進電機的驅(qū)動電壓通常在5V到24V之間,具體取決于步進電機的型號和規(guī)格。在選擇步進電機驅(qū)動器時,需要考慮到電源電壓的范圍。
步進角度:步進電機的步進角度通常是以“步”為單位來表示的,每步對應(yīng)的角度范圍在1.8度到6度之間,具體取決于步進電機的型號和規(guī)格。例如,28BYJ-48型步進電機的步進角度為5.625 x 1/64度。
代碼舉例:以下是一個使用C語言控制步進電機的簡單示例代碼。在這個例子中,我們使用了一個簡單的循環(huán)來向步進電機發(fā)送脈沖信號,從而使電機正轉(zhuǎn)一定的角度。
c復(fù)制代碼#include #include // 使用WiringPi庫來控制GPIO #define PIN_A 0 #define PIN_B 1 #define PIN_C 2 #define PIN_D 3 int main(void) { // 初始化GPIO庫 wiringPiSetup(); // 設(shè)置四個GPIO引腳為輸出模式 pinMode(PIN_A, OUTPUT); pinMode(PIN_B, OUTPUT); pinMode(PIN_C, OUTPUT); pinMode(PIN_D, OUTPUT); // 正轉(zhuǎn)10圈,每圈360度 for (int i = 0; i < 10; i++) { // 正轉(zhuǎn)一圈需要給四個引腳發(fā)送16個脈沖信號 for (int j = 0; j < 16; j++) { digitalWrite(PIN_A, LOW); // A、B、C、D依次為低電平 delayMicroseconds(5); // 延遲5微秒 digitalWrite(PIN_B, HIGH); delayMicroseconds(5); digitalWrite(PIN_C, HIGH); delayMicroseconds(5); digitalWrite(PIN_D, LOW); delayMicroseconds(5); } } return 0; }
請注意,這只是一個簡單的示例代碼,實際的步進電機控制程序可能會更復(fù)雜,需要考慮電機的接線方式、驅(qū)動器類型、轉(zhuǎn)動方向、速度控制等方面的問題。在編寫控制程序時,建議參考電機的使用說明
審核編輯 黃宇
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
步進電機
+關(guān)注
關(guān)注
151文章
3120瀏覽量
147843
發(fā)布評論請先 登錄
相關(guān)推薦
步進電機轉(zhuǎn)速怎么控制高低
步進電機是一種將電脈沖信號轉(zhuǎn)換為角位移或線位移的開環(huán)控制元件。在非超載的情況下,電機的轉(zhuǎn)速、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負載變化的影響,當步進
什么是混合式步進電機?舉例分析
在工業(yè)自動化和精密控制領(lǐng)域,步進電機因其精確的步進控制和易于實現(xiàn)的開環(huán)控制而廣受歡迎。步進電機主要分為兩大類:永磁式

步進電機旋轉(zhuǎn)角度與哪個參數(shù)有關(guān)
步進電機是一種將電脈沖信號轉(zhuǎn)換為機械角位移的執(zhí)行元件,廣泛應(yīng)用于各種自動化設(shè)備和控制系統(tǒng)中。步進電機的旋轉(zhuǎn)角度與多個參數(shù)有關(guān),包括
步進電機通過什么控制轉(zhuǎn)動角度
步進電機是一種電磁驅(qū)動的旋轉(zhuǎn)電機,它具有精確控制轉(zhuǎn)動角度的特性。步進
步進電機驅(qū)動器細分怎么調(diào)
步進電機驅(qū)動器細分調(diào)整是步進電機控制系統(tǒng)中的一個重要環(huán)節(jié),它直接影響到步進
如何正確選擇步進電機驅(qū)動器
步進電機驅(qū)動器是步進電機系統(tǒng)中的重要組成部分,它負責(zé)將控制信號轉(zhuǎn)換為步進
驅(qū)動電壓和電壓調(diào)節(jié)是二相步進電機的精準性能策劃
二相步進電機的工作原理基于電流在兩個相位之間切換,從而產(chǎn)生旋轉(zhuǎn)的磁場,驅(qū)動電機轉(zhuǎn)動。因此,驅(qū)動電壓

如何調(diào)整二相步進電機的步進角度,控制步進角度的功能?
在當今的自動化設(shè)備中,二相步進電機作為一種常見的驅(qū)動元件,其精確控制步進角度的功能尤為重要。那么,博揚智能如何調(diào)整二相
電源電壓是影響步進電機轉(zhuǎn)速的重要因素之
步進電機的轉(zhuǎn)速是指電機在單位時間內(nèi)旋轉(zhuǎn)的角度或者轉(zhuǎn)動的圈數(shù)。在二相步進電機中,轉(zhuǎn)速受到幾個因素的
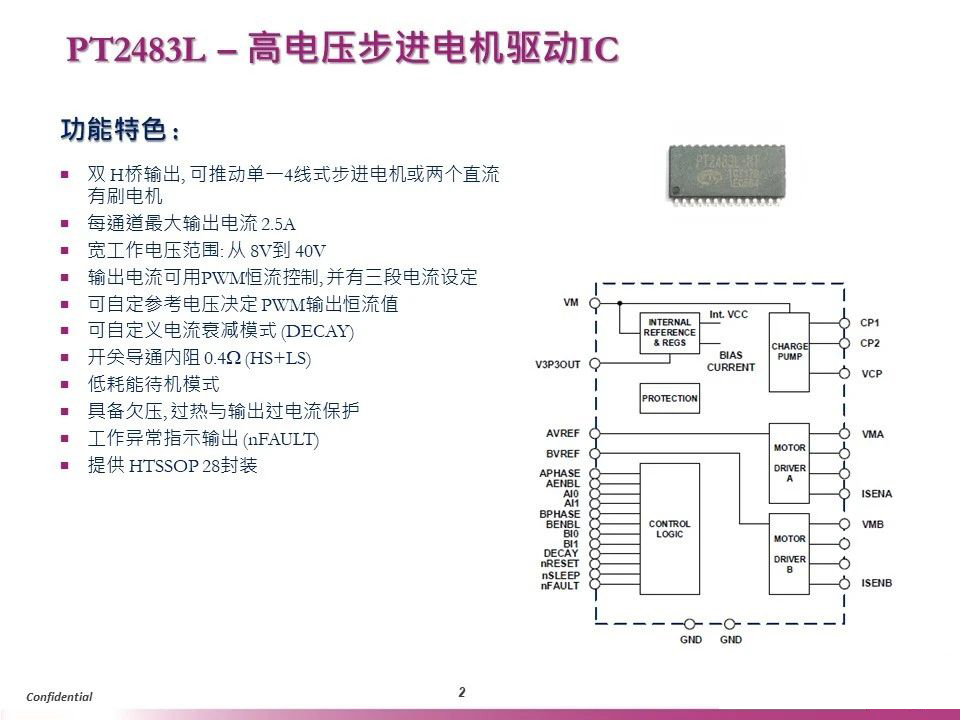
PT2483L – 高電壓步進電機驅(qū)動IC
PT2483L是一款高電壓步進電機驅(qū)動IC。適用于熱敏打印機,安防云臺,舞臺旋轉(zhuǎn)燈光,微型雕刻機,3D打印等
什么是步進電機的細分控制?步進電機為什么要細分,如何細分?
什么是步進電機的細分控制?步進電機為什么要細分,如何細分? 步進電機的細分控制是一種控制技術(shù),通
arduino控制步進電機代碼
Arduino是一種開放源代碼的電路板平臺,它可以用于控制各種不同的電子設(shè)備,包括步進電機。步進電機是一種電動機,可以通過下達特定的指令來控





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論