") 外骨骼機器人的概述與分類
外骨骼機器人的概述與分類
一、外骨骼機器人的概述
外骨骼機器人是穿戴在使用者身體外部的一種智能機械結(jié)構(gòu),可將人體感覺、思維、運動等器官與機器的感知系統(tǒng)、智能處理中心、控制執(zhí)行系統(tǒng)相結(jié)合,從而達到改善人體物理機能及提高身體素質(zhì)等目的,其本質(zhì)是一類可實現(xiàn)人機結(jié)合的可穿戴式機器人。
在仿生原理、人體工程學(xué)設(shè)計以及信息控制技術(shù)等基礎(chǔ)上,外骨骼機器人還涉及生物運動學(xué)、機器人學(xué)、信息科學(xué)、人工智能等學(xué)科知識,專業(yè)類涉及機械,電子自動化,計算機等幾大專業(yè)。
- 機械專業(yè):在外骨骼機器人上是重要的一方面。外骨骼的機械問題主要解決結(jié)構(gòu)、傳動、人機工程等問題。
- 電子專業(yè):則主要指機器人的電子硬件設(shè)計,與機械形成耦合關(guān)系,在考慮機械結(jié)構(gòu)的時候要兼顧電子硬件,在考慮電子硬件的時候也要考慮機械結(jié)構(gòu)的可行問題。具體上,主要攻克傳感器、控制器、電源管理等問題。
- 自動化專業(yè):主要解決外骨骼機器人的控制問題,是核心方面。控制解決的問題就是讓外骨骼如何與人協(xié)調(diào)、如何提供助力、如何感知人體運動意圖等。
- 計算機專業(yè):則主要是與控制相關(guān),因此也被涉及。在操作系統(tǒng)、數(shù)據(jù)處理、人工智能等方面,計算機專業(yè)接觸的多,處理這些問題相對自動化專業(yè)更順手。
外骨骼機器人可根據(jù)功能、結(jié)構(gòu)部位等維度進行分類。
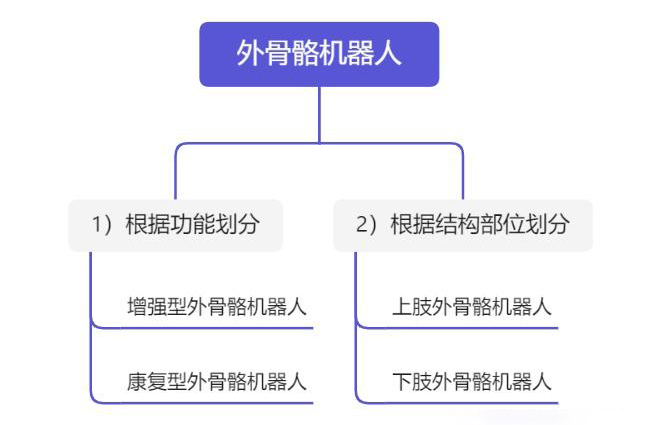
二、外骨骼機器人的分類
1)根據(jù)功能劃分
外骨骼機器人可分為增強型外骨骼機器人和康復(fù)型外骨骼機器人,
增強型外骨骼機器人:可幫助使用者增強肌肉能力、減輕負荷,多應(yīng)用于軍事領(lǐng)域及工業(yè)領(lǐng)域。
康復(fù)型外骨骼機器人:可輔助肢體運動障礙患者進行康復(fù)訓(xùn)練,多應(yīng)用于醫(yī)療康復(fù)領(lǐng)域。
(1)軍事領(lǐng)域
外骨骼機器人發(fā)源自軍事領(lǐng)域。從 2000 年開始,美國軍方率先開展對增強人體機能的外骨骼機器人研究,其目的是設(shè)計增強型軍用裝甲以提高士兵個人防護能力。
美國政府先后與加利福尼亞大學(xué)伯克利分校機器人和人體工程實驗室、美國 Sarcos Robotic 公司等研究單位進行合作,要求研究出具有自身能源供應(yīng)裝置、現(xiàn)代化通訊系統(tǒng)、傳感系統(tǒng)、作戰(zhàn)武器系統(tǒng)、噸級負荷能力、高速運動能力以及保護功能的外骨骼機器人。
(2)工業(yè)領(lǐng)域
以快遞物流、房地產(chǎn)施工和伐木工程等行業(yè)為代表,該類行業(yè)的勞動強度大、人力成本高、工作效率低。
外骨骼機器人在工業(yè)領(lǐng)域的運用將幫助從業(yè)者減輕負重、 提高工作效率,如京東在 2018 年“618”活動期間為員工配備了外骨骼機器人輔助搬運, 大幅提高員工工作效率。
(3)醫(yī)療康復(fù)領(lǐng)域
外骨骼機器人可幫助老年人、殘疾人以及中風(fēng)、偏癱患者等群體進行康復(fù)訓(xùn)練,是當(dāng)前中國外骨骼機器人行業(yè)的主要應(yīng)用領(lǐng)域。
以色列 ReWalk Robotics、 日本 Cyberdyne 及美國 Ekso Bionics 是全球外骨骼機器人在醫(yī)療康復(fù)領(lǐng)域的頭部企業(yè)。
2)根據(jù)結(jié)構(gòu)部位劃分
外骨骼機器人可分為上肢外骨骼機器人和下肢外骨骼機器人。
(1)上肢外骨骼機器人
穿戴部位為使用者背部,由主機箱、上肢固定結(jié)構(gòu)、可動關(guān)節(jié)及連接結(jié)構(gòu)等組成,其中主機箱中裝有系統(tǒng)運行平臺、感應(yīng)控制、電源等設(shè)備。
上肢外骨骼機器人通過仿真機械設(shè)計,將肩關(guān)節(jié)、肘關(guān)節(jié)、腕關(guān)節(jié)設(shè)計為可動關(guān)節(jié),應(yīng)用壓力傳感器、陀螺儀、無線傳導(dǎo)等技術(shù),可幫助使用者增強上肢力量、減輕負重、減少身體損傷及提升工作效率,并讓使用者可從容應(yīng)對更多復(fù)雜精密工作。
上肢外骨骼機器人主要運用于快遞物流、建筑施工等高強度、勞動密集型行業(yè)。
(2)下肢外骨骼機器人
可覆蓋腰部、髖關(guān)節(jié)到腳部的位置,由主機箱、下肢固定結(jié)構(gòu)、可動關(guān)節(jié)及連接結(jié)構(gòu)組成,部分產(chǎn)品配備了拐杖以實現(xiàn)支撐和控制功能。
下肢外骨骼機器人通過傳感系統(tǒng)、動力輸出裝置、控制系統(tǒng)及能源系統(tǒng)等技術(shù),可幫助使用者通過行走訓(xùn)練提升肌肉力量、恢復(fù)下肢神經(jīng)、避免關(guān)節(jié)及肌肉萎縮。
-
機器人
+關(guān)注
關(guān)注
211文章
28641瀏覽量
208397 -
機械
+關(guān)注
關(guān)注
8文章
1619瀏覽量
40776 -
邁步機器人
+關(guān)注
關(guān)注
0文章
39瀏覽量
1341
發(fā)布評論請先 登錄
相關(guān)推薦
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示
步行助力外骨骼機器人
工業(yè)機器人常用的編程方式
「知識講堂」外骨骼康復(fù)機器人醫(yī)療器械分類、標準、注冊指導(dǎo)原則

思嵐科技亮相智能機器人分級分類評價創(chuàng)新論壇
Al大模型機器人
微型導(dǎo)軌:手術(shù)機器人的高精度“骨骼”

北卡羅來納州立大學(xué)突破:模擬框架加速外骨骼機器人控制系統(tǒng)開發(fā)
北卡羅來納州立大學(xué):加速外骨骼機器人控制系統(tǒng)的研發(fā)
abb工業(yè)機器人的編程語言是什么
巡檢機器人的分類和種類有哪些

「科技助殘」邁步機器人受邀參與北京、深圳等地殘聯(lián)助殘活動,科技助力殘疾人士共享美好生活






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論