") 自動(dòng)駕駛運(yùn)動(dòng)控制原理
自動(dòng)駕駛運(yùn)動(dòng)控制原理
運(yùn)動(dòng)控制(激活)
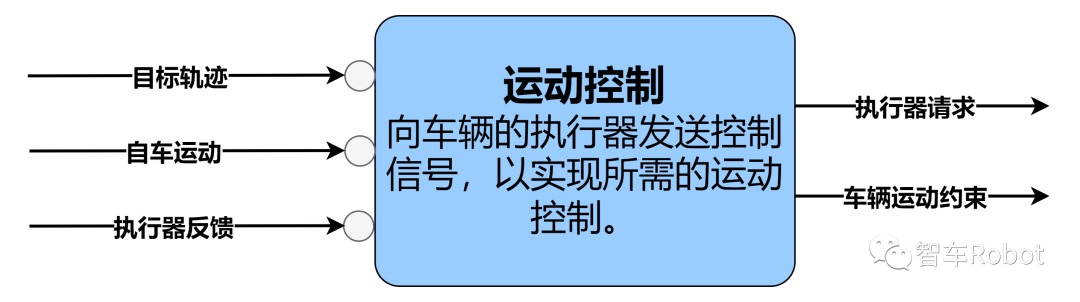
運(yùn)動(dòng)控制功能模塊圖
運(yùn)動(dòng)控制(激活)功能模塊負(fù)責(zé)請(qǐng)求與自主車輛運(yùn)動(dòng)相關(guān)的推進(jìn)變化,包括但不限于加速請(qǐng)求、制動(dòng)請(qǐng)求和轉(zhuǎn)向請(qǐng)求。
責(zé)任包括:
?提供與各種外部執(zhí)行模塊的接口,如電動(dòng)助力轉(zhuǎn)向(EPS)、自動(dòng)制動(dòng)(ABS)、PRNDL變速箱齒輪選擇、牽引控制等。
?提供必要的中間件層來管理與外部執(zhí)行模塊完整且足夠的接口,這些模塊具有不同的復(fù)雜性和能力級(jí)別。例如,外部執(zhí)行模塊可以包括基于環(huán)境數(shù)據(jù)和條件的學(xué)習(xí)能力,或者它可以是一個(gè)簡(jiǎn)單的、傳統(tǒng)的基于請(qǐng)求的系統(tǒng)。
?接收、管理和展示外部執(zhí)行模塊呈現(xiàn)的車輛運(yùn)動(dòng)約束,并呈現(xiàn)給其他自動(dòng)駕駛系統(tǒng)功能模塊。這可能包括聚合、同步、統(tǒng)計(jì)分析和封裝等活動(dòng)。
?將目標(biāo)軌跡轉(zhuǎn)換為針對(duì)外部模塊的適當(dāng)執(zhí)行請(qǐng)求,包括考慮自車運(yùn)動(dòng)輸入和外部執(zhí)行器預(yù)測(cè)。
?根據(jù)需要為外部執(zhí)行模塊進(jìn)行預(yù)處理。
運(yùn)動(dòng)控制輸入:
?目標(biāo)軌跡:**來自軌跡規(guī)劃的請(qǐng)求,是運(yùn)動(dòng)控制(激活)輸出的主要考慮因素。
?自車運(yùn)動(dòng):**接收自主車輛姿態(tài)信息,與目標(biāo)軌跡一起考慮以生成執(zhí)行器請(qǐng)求。
?執(zhí)行器反饋:**向系統(tǒng)暴露車輛運(yùn)動(dòng)約束。由于運(yùn)動(dòng)控制(激活)可以與各種外部執(zhí)行模塊接口,此反饋在單位、格式、類型等方面將有所不同。
運(yùn)動(dòng)控制輸出:
執(zhí)行器請(qǐng)求:**向多個(gè)外部執(zhí)行模塊提供主要請(qǐng)求輸出。
車輛運(yùn)動(dòng)約束:**提供外部執(zhí)行模塊的限制反饋,匯總后呈現(xiàn)給其他自動(dòng)駕駛系統(tǒng)模塊,如軌跡規(guī)劃(路徑規(guī)劃)。
-
模塊
+關(guān)注
關(guān)注
7文章
2735瀏覽量
47750 -
汽車電子
+關(guān)注
關(guān)注
3029文章
8023瀏覽量
167813 -
運(yùn)動(dòng)控制
+關(guān)注
關(guān)注
4文章
588瀏覽量
32984 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
785文章
13931瀏覽量
167008
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論