 “機器人+”電梯應用突破空間限制 盡享“一鍵直達”
“機器人+”電梯應用突破空間限制 盡享“一鍵直達”
近日,【“機器人+”應用】標準《移動機器人電梯適用性要求及測試方法》第二次專家組研討會順利召開,思嵐科技作為智能機器人行業領軍企業,用領先的技術和成熟的落地方案在此次專家研討會中建言獻策,助力機器人乘梯安全、機器人-電梯接口與交互、機器人電梯適用性分級等標準的建設。
機器人乘梯跨樓層作業能力能夠增強機器人應用靈活性,有效提升任務效率,因此智能機器人是否可以靈活乘擠電梯的問題也被廣泛關注。
在此次研討會上,思嵐科技機器人測試安裝部總監張麗萍向大家分享了思嵐在智能機器人在梯控解決方案中的寶貴經驗,并提出了三大方向:
01
乘梯任務循環測試的測試方法和要求
02
機器人跨越電梯縫隙的要求和測試方法
03
電池安全性及后續各電池類型的應用安全標準
針對機器人乘梯任務循環(包含導航避障,自主乘/“擠”梯,機器人-電梯接口與交互等,異常處理等),機器人如何跨越電梯縫隙,電池的安全性問題等這些難題,其實早在幾年前,思嵐就已經對智能機器人乘梯擠梯的技術進行了研究并且成功突破了技術難關。
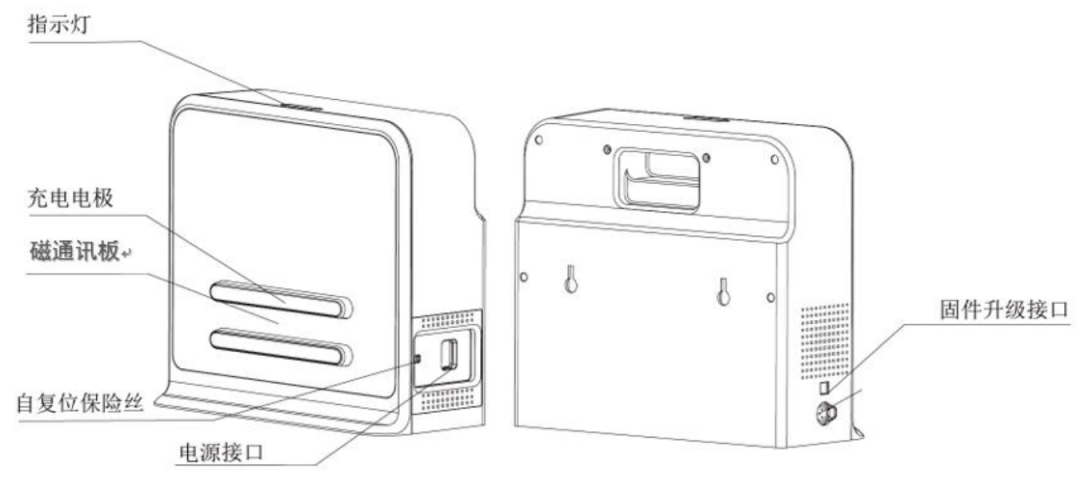
2021年,思嵐就發布了業內首個集成梯控的機器人底盤Hermes,成為了多樓層智能服務機器人開發的最佳“切入口”。2022年,思嵐推出了同樣搭載智能梯控方案的機器人移動底盤Athena2.0。并在今年9月份實現了全新升級,擁有Pro和Pro Max兩大版本,助力機器人多樓層運動。
自主導航避障、乘擠梯讓機器人任務更順
自主導航避障
01
思嵐的機器人移動底盤融合了激光+視覺等多重SLAM技術,采用雙攝深度攝像頭,能夠靈活識別環境中的黑白物體、細小物體、高處物體等障礙物,對導航行為進行預判,即使在高峰時期也不會撞到人。
自主乘/擠電梯
02
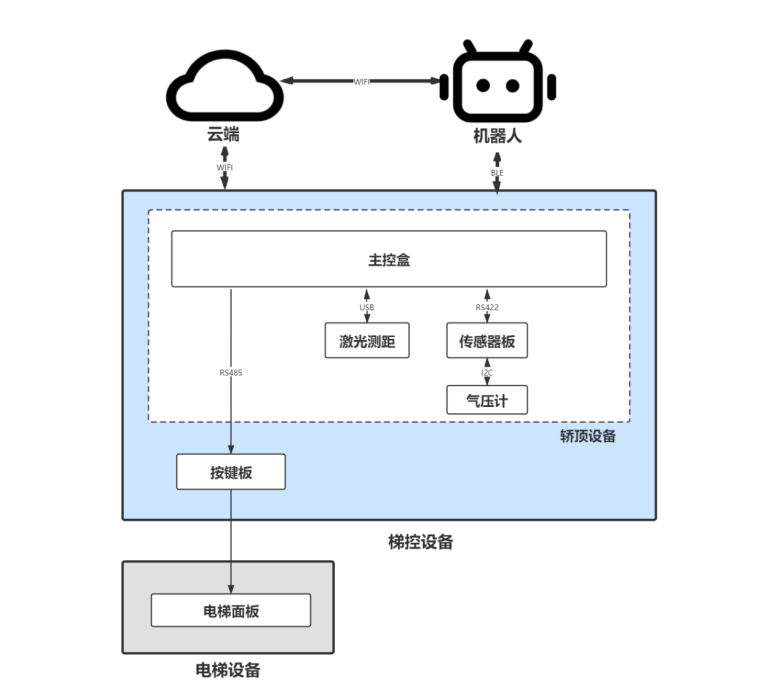
Hermes/Athena2.0 獨創性集成了智能電梯控制方案,可以實現自主呼叫電梯,自主搭乘/擠電梯,實現多樓層無障礙行動。同時,思嵐提供全套的電梯加裝和調試服務,安裝簡單快捷,助力開發者快速驗證,實現機器人快速應用落地。
無需改裝,適配90%以上電梯品牌
03
思嵐的3.0梯控方案優化了濾波算法,可以支持市面上90%以上的電梯品牌,不需要改裝電梯即可進行實時監控,通過內置的傳感器以及自適應算法,就可以準確檢測出電梯轎廂當前所在的樓層、上下行狀態,實時性到了毫秒級,精確度達到96%以上,實現機器人智能呼喚,自主切換樓層地圖,自主搭乘并上下電梯等功能,讓機器人乘/擠電梯更加智能。
快速處理突發異常
04
為了解決梯控系統的快速應用,思嵐將“輕部署,高可靠”做到極致。在使用思嵐機器人底盤的同時,即可享受機器人平臺服務,包括云后臺服務、智能梯控硬件設備加裝、調試服務。在智能機器人出現故障或異常時可以通過云端快速調整。
超強爬坡越障能力“通關”電梯縫隙
思嵐在為客戶部署智能機器人時,也遇到過很多問題,比如面對鋪設厚地毯的電梯,以及電梯與地面存在一定高度的坡度或縫隙時,機器人需要有足夠的爬坡越障能力才能順利通行。
思嵐顯然注意到了這一點,Hermes和Athena2.0系列均擁有卓越的越障能力,通過這些“關卡”可謂如履平地。
全力做好電池的安全性保障
生命重于泰山,安全生產是民生大事。思嵐的機器人底盤以及充電樁采用的都是阻燃材料,能夠保護電池和機器人使用安全。
值得一提的是,10月,由思嵐參與起草的《企業研發機構管理基本要求》團體標準審定會也召開完畢。該標準的評定將進一步促進企業創新,提高技術水平和市場競爭力,創造更多的商業價值和社會價值。
在標準制定的道路上,思嵐一直在砥礪前行,用自己十年的技術迭代和場景積累,持續助力智能機器人產業的健康發展。
審核編輯:劉清
-
機器人
+關注
關注
211文章
28641瀏覽量
208412 -
智能機器人
+關注
關注
17文章
872瀏覽量
82541 -
SLAM
+關注
關注
23文章
426瀏覽量
31930
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
移動機器人的技術突破和未來展望

一鍵斷電開關的種類有哪些
一鍵斷電開關的控制原理是什么
變電站一鍵順控系統和開關柜一鍵順控有區別嗎?
Al大模型機器人
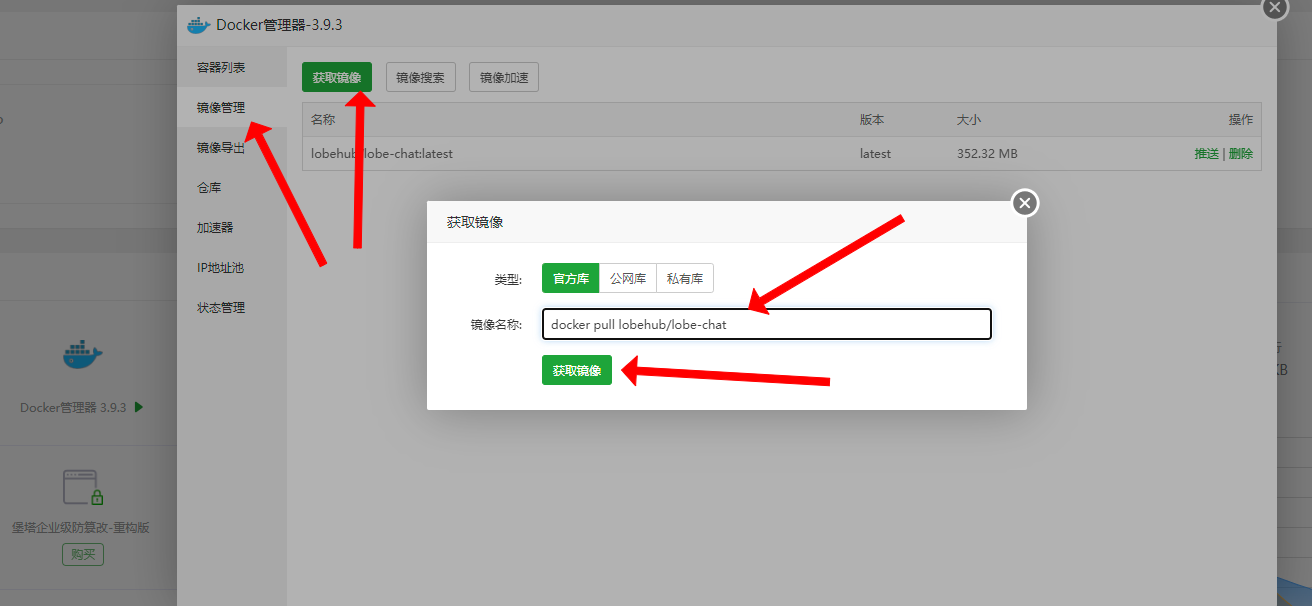
寶塔面板一鍵免費部署LobeChat聊天機器人開發自己私有的ChatGPT





 工商網監
工商網監
評論