") mpc控制是什么 mpc介紹
mpc控制是什么 mpc介紹
MPC控制
模型預(yù)測控制(Model predictive control,MPC)從上世紀(jì)70年代問世以來,已經(jīng)從最初在工業(yè)過程中應(yīng)用的啟發(fā)式控制算法發(fā)展成為一個具有豐富理論和實(shí)踐內(nèi)容的新的學(xué)科分支。
預(yù)測控制針對的是有優(yōu)化需求的控制問題,30多年來預(yù)測控制在復(fù)雜工業(yè)過程中所取得的成功,已充分顯現(xiàn)出其處理復(fù)雜約束優(yōu)化控制問題的巨大潛力。
MPC控制是一種實(shí)時的閉環(huán)優(yōu)化控制方法,該算法的優(yōu)點(diǎn)主要是反復(fù)在線進(jìn)行,能夠不斷獲取當(dāng)前最優(yōu)控制量,且可以通過建立目標(biāo)函數(shù)來滿足車輛執(zhí)行機(jī)構(gòu)、側(cè)滑和動力學(xué)等多約束條件。
但其跟蹤性能對預(yù)測模型的精度很敏感,且由于非線性模型預(yù)測控制對計(jì)算性能的高要求,使其不適合高速駕駛環(huán)境。
目前許多研究者都將非線性車輛模型進(jìn)行了線性化處理,但其只能保證控制器在車輛和輪胎的線性區(qū)域的跟蹤精度。
MPC控制器也叫做滾動時域控制器,該控制器考慮控制系統(tǒng)的非線性動力學(xué)模型并預(yù)測未來一段時間內(nèi)系統(tǒng)的輸出行為,通過求解帶約束的最優(yōu)控制問題,使得系統(tǒng)在未來一段時間內(nèi)的跟蹤誤差最小,這種方法魯棒性較強(qiáng)。
模型預(yù)測控制算法具備預(yù)測模型、滾動優(yōu)化和反饋校正基本特征。傳統(tǒng)的研究方法往往忽略或者簡化了運(yùn)動學(xué)約束以及動力學(xué)約束,而這類約束對于控制性能有著顯著影響。
模型預(yù)測控制方法能夠通過優(yōu)化目標(biāo)函數(shù)顯式地將車輛運(yùn)動學(xué)和動力學(xué)約束納入考慮。
使用MPC的滾動優(yōu)化和反饋校正特性,能夠有效降低甚至消除閉環(huán)系統(tǒng)時滯問題所帶來的影響,并能夠結(jié)合規(guī)劃所給出的未來軌跡信息對運(yùn)動控制進(jìn)行優(yōu)化,提升控制性能。
Wang Weiran等人設(shè)計(jì)了一種基于拉蓋爾函數(shù)的自適應(yīng)預(yù)測控制方法。
該方法包括兩部分:一是用于精確跟蹤軌跡的自適應(yīng)MPC模塊;另一種是拉蓋爾函數(shù)模塊,用于顯著減少計(jì)算。
在自適應(yīng)MPC模塊中,引入遞歸最小二乘算法對系統(tǒng)的模型參數(shù)進(jìn)行識別,以提高系統(tǒng)的精度和魯棒性。然而,當(dāng)AUV在復(fù)雜的環(huán)境中工作時,這種方法可能會導(dǎo)致計(jì)算量的大量增加。
因此,在拉蓋爾函數(shù)中,引入控制器輸入變量的重構(gòu)來降低目標(biāo)函數(shù)的矩陣階。結(jié)果表明,該方法在計(jì)算量較少的AUV跟蹤軌跡時,在動態(tài)、抗干擾和魯棒性等方面都具有良好的性能。
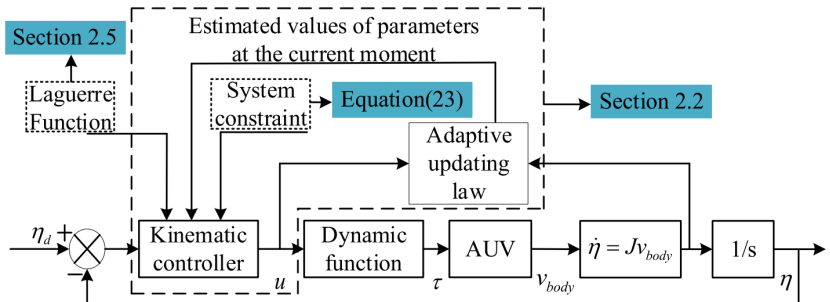
圖2-6 自適應(yīng)MPC方框圖
Paden對純追蹤算法、前輪反饋控制、后輪反饋控制、基于Lyapunov函數(shù)的控制、輸出反饋線性化控制以及MOC控制從穩(wěn)定性、時間復(fù)雜度、使用模型以及假設(shè)使用前提作出了總結(jié),如表2-2所示。
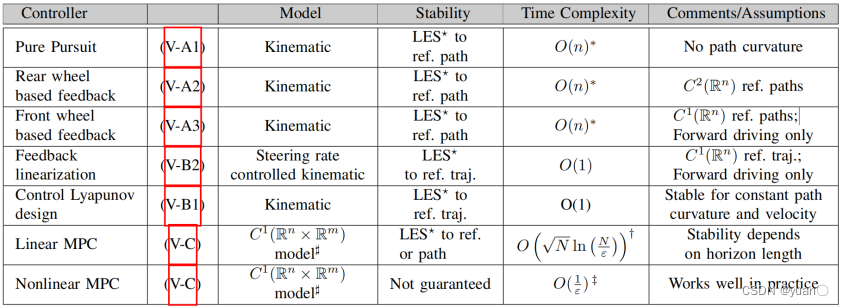
表2-2 多種控制器的總結(jié) Legend* : 局部指數(shù)穩(wěn)定性(local exponential stability ,LES)
-
控制器
+關(guān)注
關(guān)注
112文章
16446瀏覽量
179456 -
模型
+關(guān)注
關(guān)注
1文章
3309瀏覽量
49224 -
自動駕駛
+關(guān)注
關(guān)注
785文章
13931瀏覽量
167007
發(fā)布評論請先 登錄
相關(guān)推薦
MPC5121e單片機(jī)特性介紹
MPC508A/MPC508A/MPC509A pdf da
MPC8240與MPC106的性能比較
MPC875/MPC870,pdf,datasheet
摩托羅拉MPC755和MPC745 PowerPC微處理器特
MPC8240與MPC106的性能比較
MPC2810運(yùn)動控制器用戶手冊
MPC565PB,pdf datasheet

基于MPC8280多通道控制器驅(qū)動的研究

mpc003 mpc004 mpc006 mpc004s運(yùn)動控制
mpc533/mpc534產(chǎn)品簡介

mpc535/mpc536產(chǎn)品簡介
MPC561/MPC563參考手冊





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論