") Github上高星可產(chǎn)品化開源項目--閉環(huán)電機驅(qū)動器
Github上高星可產(chǎn)品化開源項目--閉環(huán)電機驅(qū)動器
一、項目概況
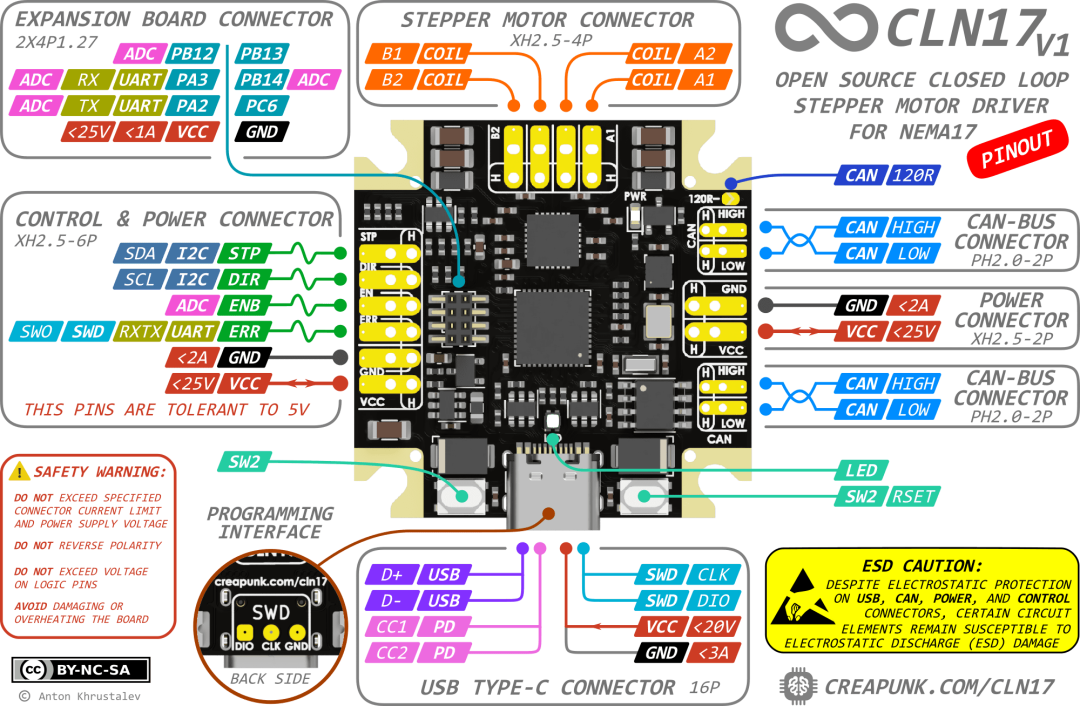
CLN17 電機驅(qū)動器是一款開源、緊湊、高性能的閉環(huán)步進電機驅(qū)動器,專為 NEMA17 外形尺寸電機設(shè)計。該驅(qū)動器提供先進的功能,如靜音和平穩(wěn)的運動、高精度的位置控制和節(jié)能功能,使其成為各種應(yīng)用的理想選擇,包括機器人、CNC 機床和 3D 打印機。
二、板框圖
三、項目特點
(1)位置控制和精度
閉環(huán)控制:電機驅(qū)動器支持閉環(huán)控制,集成編碼器進行實時位置監(jiān)控和調(diào)整,確保在具有挑戰(zhàn)性的條件下實現(xiàn)精確運動。精細(xì)定位:0.01 度的卓越位置控制精度確保了位置信息的高效和低延遲處理,并將噪音降至最低,從而實現(xiàn)平穩(wěn)運行。極其精確的無傳感器泊車:先進的無傳感器泊車算法無需額外的傳感器即可準(zhǔn)確定位電機,防止系統(tǒng)損壞。嵌入式 6 軸 IMU:LSM6DSO IMU 模塊通過 3 軸陀螺儀和 3 軸加速度計提供卓越的慣性測量功能,提供精確的運動反饋、系統(tǒng)振動檢測和應(yīng)急響應(yīng)。性能和效率自適應(yīng)轉(zhuǎn)矩控制和能源效率:電機驅(qū)動器根據(jù)負(fù)載要求調(diào)整扭矩,優(yōu)化能源效率,減少應(yīng)力并延長電機壽命。高性能:32 位 170MHz ARM Cortex-M4 微處理器為應(yīng)用代碼提供了顯著的性能改進和充足的功能。超靜音和平穩(wěn)運行:TMC2209超靜音驅(qū)動器可確保對噪聲和振動敏感的應(yīng)用安靜平穩(wěn)運行。被動制動和續(xù)流:被動制動和續(xù)流功能可實現(xiàn)電機的平穩(wěn)減速和滑行,從而增強控制和效率。
(2)兼容性和模塊化
開源方法:完全訪問硬件原理圖、PCB 布局、固件和軟件,促進透明度、協(xié)作和創(chuàng)新,從而創(chuàng)建定制解決方案。增強的兼容性:多種連接選項,包括 UART、I2C、CAN 總線(支持 FD)和 USB2.0 Type-C(支持 PowerDelivery),有助于實現(xiàn)無縫通信并輕松集成到現(xiàn)有系統(tǒng)中。 模塊化概念:各種配置滿足尺寸和性能要求,同時保持成本效益,支持?jǐn)U展板的附加功能。 網(wǎng)絡(luò)互聯(lián):支持網(wǎng)絡(luò)配置架構(gòu),允許多個驅(qū)動程序相互連接,而無需額外的設(shè)備。
(3)安全可靠
可靠運行:通過寬溫度范圍、診斷功能以及內(nèi)置的 ESD、電流限制、反極性、過載和 3.3V/5V IO 容差保護功能,確保可靠運行。 增強的安全算法:增強的安全算法可智能監(jiān)控電機狀況,以保護電機系統(tǒng)和用戶免受潛在傷害。 具有實時時鐘的精確定時:專用的 HSE 和 RTC 時鐘晶振可確保對時間關(guān)鍵型任務(wù)的精確定時、可靠的代碼執(zhí)行和準(zhǔn)確的時間處理。
四、應(yīng)用場景
CLN17 步進電機驅(qū)動器適用于廣泛的應(yīng)用,包括但不限于下列應(yīng)用。
(一)學(xué)習(xí)與研究
學(xué)習(xí)平臺:開源設(shè)計和清晰的文檔提供了通用的電機控制學(xué)習(xí)解決方案,促進了學(xué)生和教育工作者之間的創(chuàng)新和協(xié)作。例如:機械臂套件;太陽能跟蹤系統(tǒng)。 實驗室設(shè)備:精度、安全性和反饋功能對于可靠操作、準(zhǔn)確結(jié)果和研究人員安全至關(guān)重要。例如:自動化液體處理系統(tǒng);精密樣品定位系統(tǒng)。 協(xié)作機器人和學(xué)習(xí)系統(tǒng):精確的軸位置和速度檢測使電機驅(qū)動器適用于協(xié)作機器人和學(xué)習(xí)系統(tǒng),從而實現(xiàn)安全的人機協(xié)作。例如:用于社交互動的人形機器人;用于裝配任務(wù)的協(xié)作式機械臂。
(二)機器人和自動運動
CNC機床和3D打印機:精確和無差錯的定位對于CNC機床和3D打印機的精確制造至關(guān)重要。例如:高速或大幅面3D打印機;激光切割雕刻機;臺式數(shù)控銑床。 機器人和自動化系統(tǒng):精確的控制和運動提高了機器人和自動化的整體性能。例如:自主移動機器人;拾取和放置機器人系統(tǒng)。 工業(yè)運動控制系統(tǒng):可靠性和與工業(yè)接口的兼容性提高了工業(yè)運動控制的性能。例如:輸送系統(tǒng)和三角機器人;自動化裝配線。
(三)觸覺和穩(wěn)定
觸覺和力反饋系統(tǒng):精確的電流和力控制對于逼真的觸覺和力反饋體驗至關(guān)重要。例如:用于遠(yuǎn)程控制的遠(yuǎn)程操作系統(tǒng);具有力反饋的虛擬現(xiàn)實控制器。 相機/望遠(yuǎn)鏡穩(wěn)定系統(tǒng):相機和望遠(yuǎn)鏡系統(tǒng)的穩(wěn)定方向依賴于精確的定位和位置保持,從而簡化了系統(tǒng)校準(zhǔn),以實現(xiàn)精確的組件對準(zhǔn)。例如:電動望遠(yuǎn)鏡支架;攝像機滑塊。該項目仍在開發(fā)中,無法保證所有項目材料都沒有錯誤,請大家持續(xù)關(guān)注更新。
-
驅(qū)動器
+關(guān)注
關(guān)注
53文章
8271瀏覽量
147067 -
機器人
+關(guān)注
關(guān)注
211文章
28642瀏覽量
208421 -
3D打印機
+關(guān)注
關(guān)注
9文章
528瀏覽量
44289 -
GitHub
+關(guān)注
關(guān)注
3文章
473瀏覽量
16564
原文標(biāo)題:Github上高星可產(chǎn)品化開源項目--閉環(huán)電機驅(qū)動器
文章出處:【微信號:All_best_xiaolong,微信公眾號:大魚機器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
步進電機驅(qū)動器有哪些分類,如何選型?

驅(qū)動器的工作原理 驅(qū)動器與電機的區(qū)別
Banana P開源社區(qū)基于龍芯芯片方案的產(chǎn)品化設(shè)計-國產(chǎn)替換 全國產(chǎn)化

伺服驅(qū)動器與傳統(tǒng)電機的區(qū)別
伺服驅(qū)動器與步進電機的比較
步進電機驅(qū)動器的主要驅(qū)動方式有哪些?簡單介紹
步進電機驅(qū)動器的主要工作原理是什么?
步進電機驅(qū)動器有哪些類型?該如何分類?
如何為直流電機驅(qū)動器選擇柵極驅(qū)動器

適用于可擴展系統(tǒng)的高效、無代碼、無傳感器BLDC電機驅(qū)動器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論