 3D結構光內部硬件拆解
3D結構光內部硬件拆解
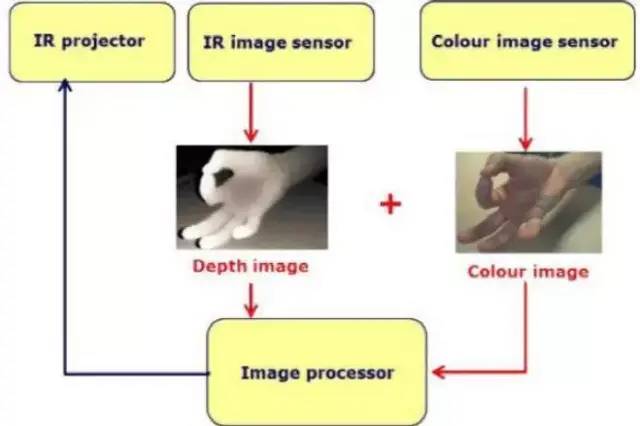
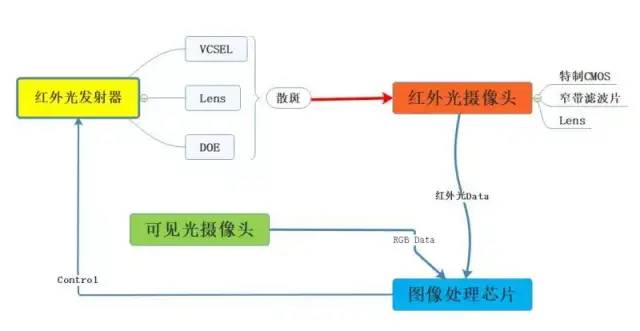
無論是結構光、TOF還是雙目立體成像方案,主要的硬件包括紅外光發射器、紅外光攝像頭、可見光攝像頭和圖像處理芯片四部分,紅外攝像頭需要特制的窄帶濾色片,另外結構光方案還需要在發射端添加光學棱鏡與光柵,雙目立體成像多一顆紅外光攝像頭。要了解他們涉及的工藝,首先就要對每一部分的功能和構成做深入了解。我們以結構光為例,對每一部分的構成進行拆解。
1 紅外發射器
紅外光發射部分是整個3D視覺重要的組件之一,用于發射經過特殊調制的不可見紅外光至拍攝物體,其發射圖像的質量對整個識別效果至關重要。
采用結構光方案的 3D 視覺相比于 TOF 方案要復雜得多,主要是結構光方案需要采用 pattern 圖像(如激光散斑等)進行空間標識,因此需要定制的DOE(衍射光柵)和 WLO(晶圓級光學透鏡,包括擴束元件、準直元件、投射透鏡等)。但實際上WLO要視情況而定,在我從事的VCSEL項目中,就只有準直Lens,沒有擴束元件和投射透鏡。
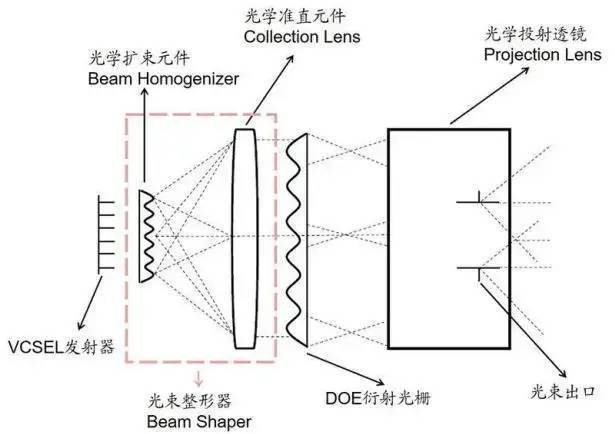
整個不可見光紅外線(IR)發射模組的工作流程主要為:
1)不可見紅外光發射源(激光器或者LED)發射出不可見紅外光;
2)不可見紅外光通過準直鏡頭進行校準;
3)校準后的不可見紅外光通過光學衍射元件(DOE)進行散射,進而得到所需的散斑圖案。因為散斑圖案發射角度有限,所以需要光柵將散斑圖案進行衍射“復制”后,擴大其投射角度。因此IR發射模組主要部件包括:不可見紅外光發射源(激光器或者LED)、準直鏡頭(WLO)、光學衍射元件(DOE)。
1.1 近紅外光源選擇,VCSEL是最佳方案
目前,可以提供 800-1000nm 波段的近紅外光源主要有三種:紅外LED、紅外LD-EEL(邊發射激光二極管)和VCSEL(垂直腔面發射激光器)。
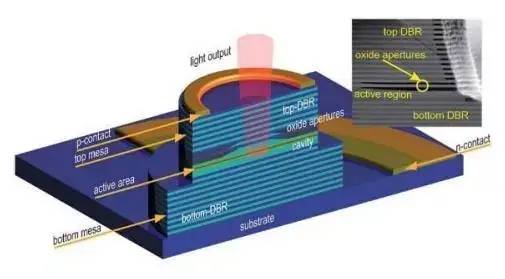
VCSEL 可以說是紅外激光LD的一種,全名為垂直共振腔表面放射激光器,顧名思義,它采用垂直發射模式,與其他紅外LD的邊發射模式不同。
VCSEL的垂直結構更加適合進行晶圓級制造和封測,規模量產之后的成本相比于邊發射LD有優勢,可靠性高,沒有傳統的激光器結構如暗線缺陷的失效模式。相比于LED,VCSEL的光譜質量高,中心波長溫漂小,響應速度快,優勢明顯。
邊發射EEL激光二極管LD結構圖
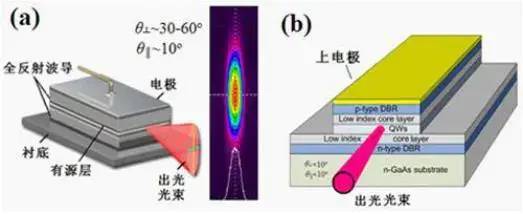
垂直發射模式VCSEL結構圖
三種主流近紅外光發射光源優劣對比:
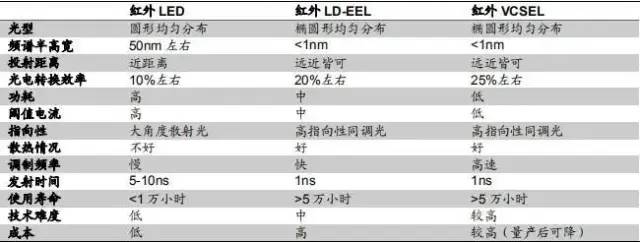
綜合分析三種方案,LED 雖然成本低,但是發射光角度大,必須輸出更多的功率以克服損失。此外,LED 不能快速調制,限制了分辨率,需要增加閃光持續時間;邊發射LD 也是手勢識別的可選方案(如DFB),但是輸出功率固定,邊緣發射的模式在制造工藝方面兼容性不好;VCSEL 比 LD-EEL 的優勢在于所需的驅動電壓和電流小,功耗低,光源可調變頻率更高(可達數 GHz),與化合物半導體工藝兼容,適合大規模集成制造。尤其是 VCSEL 功耗低、可調頻率高、垂直發射的優點,使其比 LD-EEL 更加適合消費電子智能終端。
1.2 晶圓級光學元件WLO是核心組件
WLO 晶圓級光學器件,是指晶元級鏡頭制造技術和工藝。與傳統光學器件的加工技術不同,WLO 工藝在整片玻璃晶元上,用半導體工藝批量復制加工鏡頭,多個鏡頭晶元壓合在一起,然后切割成單顆鏡頭,具有尺寸小、高度低、一致性好等特點。光學透鏡間的位置精度達到 nm 級。
傳統光學鏡頭與晶圓級鏡頭對比
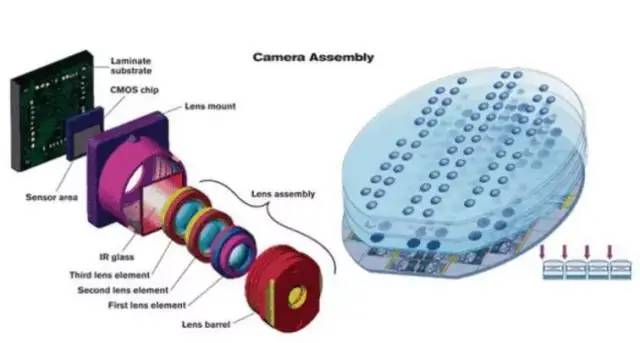
在 3D 視覺發射端結構復雜的情況下,光學器件采用 WLO 工藝,可以有效縮減體積空間,同時器件的一致性好,光束質量高,采用半導體工藝在大規模量產之后具有成本優勢,是未來標準化的光學透鏡組合的最佳選擇。
由于WLO 工藝由于是采用半導體工藝和設計思路進行光學器件的制造,因此整個流程更加復雜,無論是設計流程還是加工環節,都需要更加先進的設計思路和更加精細的加工處理。
1.3 DOE對于結構光方案至關重要
在3D視覺結構光方案中,經過準直鏡頭校準后的激光束并沒有特征信息,必須采用特定的 pattern 光學圖案(如激光散斑等)實現深度信息的測量,因此下一步需要對激光束進行調制,使其具備特征結構,光學衍射元件(DOE)就是用來完成這一任務的。
VCSEL射出的激光束經準直后,通過DOE進行散射,即可得到所需的散斑圖案。由于DOE對于光束進行散射的角度(FOV)有限,所以需要光柵將散斑圖案進行衍射“復制”后,擴大其投射角度。
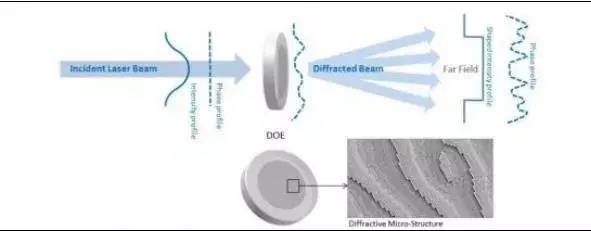
DOE 衍射光學元件(Diffractive Optical Elements)是基于光的衍射原理,利用計算機輔助設計,并通過半導體芯片制造工藝,在基片上(或傳統光學器件表面)刻蝕產生臺階型或連續浮雕結構(一般為光柵結構),形成同軸再現、且具有極高衍射效率的一類光學元件。通過不同的設計來控制光束的發散角和形成光斑的形貌,實現光束形成特定圖案的功能。
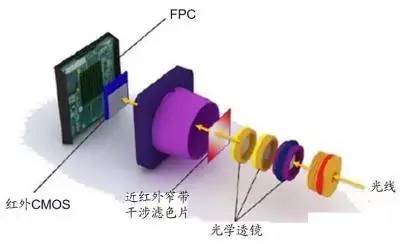
2 不可見光紅外線(IR)接收模組
在3D結構光方案中,RX紅外接收部分主要為一顆紅外攝像頭,用于接收被物體反射的紅外光,采集空間信息。該紅外攝像頭主要包括三部分:紅外CMOS傳感器、光學鏡頭、紅外窄帶干涉濾色片。
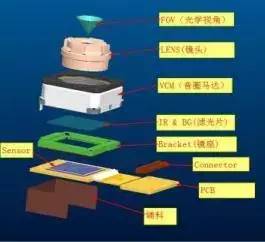
在基本結構上與目前主流的可見光攝像頭類似,但是在具體的零部件方面存在差異:
1)可見光CMOS傳感器需要識別RGB三色,對分辨率的要求高,紅外CMOS只需要識別近紅外光,分辨率要求不高;
2)可見光攝像頭需要紅外截止濾色片將紅外光截止掉,只通過可見光,而紅外攝像頭只通過特定波段的近紅外光,而將可見光截止掉,因此需要窄帶濾色片;
3)由于可見光攝像頭對圖像分辨率要求高,因此光學鏡頭的設計非常復雜,紅外攝像頭對光學鏡頭的要求不高。
紅外攝像頭主要結構
典型可見光攝像頭基本構成
2.1 特制紅外CMOS
在 3D 視覺方案中,紅外 CMOS的要求是其能接受被拍攝物體發射回來的紅外散斑圖案,不需要對其他波長的光線進行成像。
2.2窄帶濾光片
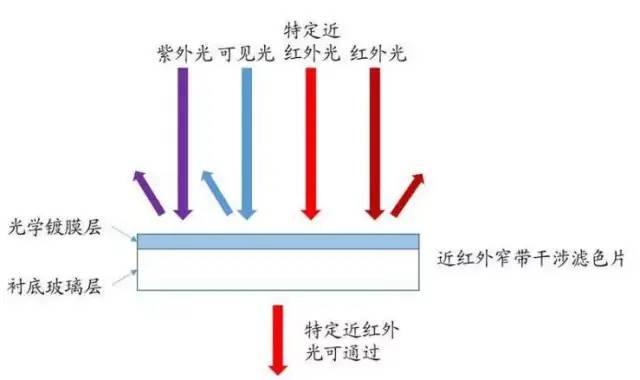
在IR發送端,VCSEL發射的是940nm波長的紅外光,因此在接受端需要將940nm以外的環境光剔除,讓接受端的特制紅外CMOS只接收到940nm的紅外光。為達到這一目的,需要用到窄帶濾光片。
所謂窄帶濾光片,就是在特定的波段允許光信號通過,而偏離這個波段以外的兩側光信號被阻止。窄帶濾光片主要采用干涉原理,需要幾十層光學鍍膜構成,相比普通的RGB吸收型濾光片具有更高的技術難度和產品價格。這個鏡片在國內,很大部分由水晶光電提供。
2.3 接收端鏡頭(Lens)
接收端鏡頭為普通鏡頭,業內方案成熟,各個廠商都能提供。
總體而言,接收端除窄帶濾波片較特殊,制造難度較高外,特制紅外CMOS和鏡頭都是成熟產品,不存在制造難度。
3 可見光攝像頭
可見光鏡頭模組,采用普通鏡頭模組,用于2D彩色圖片拍攝,非新增業務。
在 3D 視覺體系中,無論是結構光方案,還是 TOF 方案,紅外光線的作用都是采集深度 Z 軸信息,從而確定物體的景深信息,而物體的平面 XY 軸信息需要借助普通可見光攝像頭進行采集。
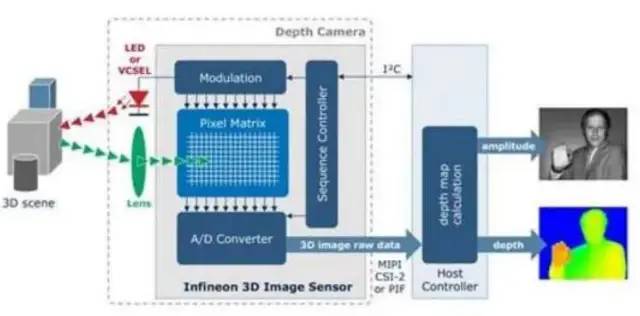
4 圖像處理芯片
圖像處理芯片,將普通鏡頭模組拍攝的2D彩色圖片和IR接收模組獲取的3D信息集合,通過復雜的算法將IR接收端采集的空間信息和鏡頭成像端采集的色彩信息相結合,生成具備空間信息的三維圖像。
該芯片設計壁壘高,尤其是算法層面的要求較高,需要根據3D視覺方案處理深度信息,目前僅有少數幾家公司擁有該技術。
好了,3D成像技術的硬件構成我們全部拆解清楚了,總結成下圖,有了這個基礎,再找其供應商就是對號入座的事情了
作者:駿馬識途 來源:簡書
審核編輯:湯梓紅
-
攝像頭
+關注
關注
60文章
4865瀏覽量
96322 -
紅外發射器
+關注
關注
0文章
48瀏覽量
16258 -
TOF
+關注
關注
9文章
485瀏覽量
36483 -
3D結構光
+關注
關注
0文章
12瀏覽量
449
原文標題:想了解3D結構光,看這份拆解就對了!
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論