 CBS多機器人路徑規劃實例講解
CBS多機器人路徑規劃實例講解
實例講解
以下將通過一個簡單的實例講解CBS的基本過程,實例如圖2所示。
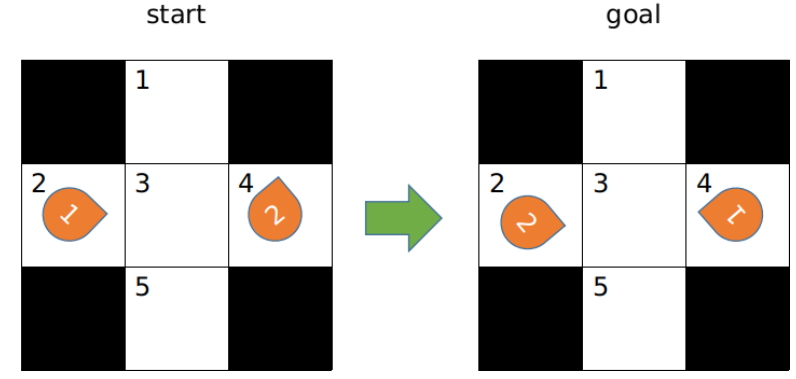
圖2 初始和目標狀態
CBS的搜索過程如圖3所示。

圖3 CBS搜索過程
CBS開始時沒有沖突約束,每個機器人按照各自的路徑規劃,得到節點1所示的路徑結果,由于路徑產生沖突,需要生成新的分支(節點2和節點3),節點2添加沖突為:1號在1時刻(從0時刻開始)不進入位置3,節點3添加沖突為:2號在1時刻不進入位置3。
在約束的作用下進行低層次的搜索,節點2和節點3都搜索到了路徑,但發生了新的沖突,由于節點2和節點3的代價值相等,可以從左邊的節點(節點2)開始生成新的分支:節點4和節點5,然后對節點4和節點5進行低層次的搜索得到路徑,最終節點5得到有效路徑,搜索過程可以結束。
待改進的地方
雖然CBS做為一個比較優秀的多機器人路徑規劃器,依然存在一些缺點影響它在實際中的應用。
1.當環境擁擠,機器人數目多時,計算時間比較長,甚至無解;
2.無法判斷有些情況是否無解,導致程序無法結束運行,且一直消耗系統內存;
3.實際情況下,機器人需要原地旋轉、有加減速度、運行存在誤差,需要后續進一步處理才能在實際中運行;
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28641瀏覽量
208411 -
程序
+關注
關注
117文章
3795瀏覽量
81411 -
路徑
+關注
關注
0文章
50瀏覽量
12507
發布評論請先 登錄
相關推薦
labview仿真問題,機器人路徑規劃
我現在做這個機器人的路徑規劃,有一個人工勢場的算法,已經用C實現算法,請問一下能否用這個labview仿真,就是給定一些起始點,終點,還有這個障礙物的坐標,中間是這個算法計算出來的一些點,能夠在執行算法的時候用labview描出
發表于 04-22 16:04
深度解析|機器人自主移動的秘密(三)
SLAM實現到掃地機器人所需要的這些功能,還是有非常多的工作要做的。針對掃地機器人,我們將其特有的路徑規劃功能預先內置在SLAMWARE中,
發表于 08-01 13:50
SLAM不等于機器人自主定位導航
和即時定位問題,而自主導航需要解決的是智能移動機器人與環境進行自主交互,尤其是點到點自主移動的問題,這需要更多的技術支持。 要想解決機器人智能移動這個問題,除了要有SLAM技術之外,還需要加入路徑
發表于 08-24 16:56
基于多傳感器信息融合的移動機器人的路徑規劃
移動機器人是機器人技術的一個重要領域,是一個集環境感知、動態決策與規劃、行為控制與執行等多功能于一體的綜合系統。動態未知環境下的移動機器人路徑
發表于 07-17 09:22
?18次下載
狹隘環境下一種多機器人路徑規劃方法
狹隘環境下多機器人路徑規劃使用共享資源時,極易產生沖突,優先順序化是解決共享資源沖突的一個重要技術。本文提出了一種基于學習分類器的動態分配優先權的方法,提高
發表于 01-08 14:35
?0次下載
移動機器人路徑規劃的實現
近年來,移動機器人的研究受到了人們的高度重視,人們對于機器人的要求不再局限于簡單的移動,而是希望機器人能夠根據周圍環境變化采取對應措施,做到自主移動的能力。因此,路徑
機器人路徑規劃算法,全局路徑規劃與局部路徑規劃究竟有哪些區別
路徑規劃是移動機器人導航最基本的環節,指的是機器人在有障礙物的工作環境中,如何找到一條從起點到終點適當的運動路徑,使






 工商網監
工商網監
評論