") 智能車控制器功能介紹
智能車控制器功能介紹
以簡單的智能車為例,一般會存在兩個控制器,一個是運行ROS的主控,另一個是運行電機控制和傳感器信息采集的單片機比如STM32。
由于存在多個控制器,完成一個機器人的具體任務,那么這多個控制器間則需要建立通信,本篇博客主要講解:
- 如何實現ROS主控和STM32之間的通信
- ROS主控對STM32發(fā)送過來的數據做哪些處理
以智能車的應用例程展開
智能車控制器功能
在智能車里存在兩個控制器:
- ROS主控
- STM32控制器
只要能將ROS跑起來就可以作為ROS主控,ROS主控可以是:
- jetson
系列,例如 nano、tx、nx - 樹莓派
- 工控機
在智能車里,ROS主控主要實現的功能有:
- 雷達信息采集
- 攝像頭信息采集
- 路徑規(guī)劃
- 定位
STM32
控制器主要實現的功能有:
通信內容
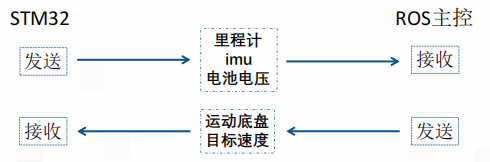
ROS主控負責接收stm32發(fā)送過來的傳感器數據
數據有里程計、imu、電池電壓。其中里程計就是電機的轉速,通過編碼器采集到。
STM32負責接收ROS主控發(fā)送過來的運動底盤的目標速度,STM32再完成電機轉速的控制,最終實現小車的移動任務
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯系本站處理。
舉報投訴
-
控制器
+關注
關注
112文章
16445瀏覽量
179453 -
機器人
+關注
關注
211文章
28641瀏覽量
208412 -
STM32
+關注
關注
2272文章
10923瀏覽量
357576 -
智能車
+關注
關注
21文章
404瀏覽量
77062 -
ROS
+關注
關注
1文章
280瀏覽量
17096
發(fā)布評論請先 登錄
相關推薦
智能車設計基礎
智能車設計基礎 第10章.rar http://filemarkets.com/file/bai2471/9d9e6c95/智能車設計基礎 第3章.rar: http://www.t00y.com
發(fā)表于 10-21 21:11
實時監(jiān)控防火智能車
的功能吧:基于51單片機,利用火焰感應、溫度傳感、GSM、尋跡和驅動等多個模塊,實現對倉庫或有毒易燃物品的無人化二十四小時監(jiān)控,更靈敏更經濟。可以實現智能車在閉環(huán)控制以及接受智能車對于
發(fā)表于 04-29 00:11
樹莓派智能車AlphaBot系列教程
;catid=57樹莓派智能車AlphaBot教程1:人生若只如初見 ...樹莓派智能車AlphaBot教程2:直流電機控制 ... 樹莓派智能車AlphaBot教程3:避障樹莓派
發(fā)表于 05-15 15:39
智能車系統解決方案總體設計
大神提出改善的建議。資料在闖客網技術論壇下載 整個系統分為懸停半空的攝像頭識別系統和地面的智能車控制系統,這兩個系統均采用MKL26Z256VLL4作為核心控制單元。半空中的識別系統通過模擬攝像頭
發(fā)表于 10-24 19:17
基于光電管路徑識別的智能車系統設計
的舵機驅動前輪轉向,使用符合PI算法的控制器實現直流電機的調速。為了使智能車快速、平穩(wěn)地行駛,系統必須把路徑識別、相應的轉向伺服電機控制以及直流驅動電機控制準確地結合在一起。 1 硬
發(fā)表于 11-06 15:08
基于紅外傳感技術的STM32智能車
設計一種集紅外遙控、 黑線循跡、自動泊車、車速檢測、行駛路程顯示等功能于一體的智能車。主要使用了紅外傳感技術,并結合 STM32F103 系列芯片,模擬現代新型汽車的自動駕駛功能。 采用槽型對射光電傳感
發(fā)表于 02-28 20:07
怎樣去設計一款完整的智能車
的無人駕駛技術來的那么復雜,但是也需要相應的傳感器、執(zhí)行器、控制器以及硬件電路并進行控制算法的設計與調試等。一般需要數月才能較為系統地掌握上述知識,而能熟練應用并進行系統化調試以及創(chuàng)新
發(fā)表于 07-29 06:00
雙舵機模糊控制在智能車控制中的應用介紹
,如何讓智能車在不同形狀的賽道上進行平穩(wěn) 、快速的切換,實現路徑的最優(yōu)控制,是轉向控制的一個關鍵問題 目前,轉向控制的物理實現普遍采用的是用一個舵機作為前輪的轉向
發(fā)表于 09-19 08:03
基于路徑識別的智能車系統設計
介紹了一種基于光電管路徑識別的智能車系統。該智能車使用光電管作為路徑識別裝置,依靠舵機輔助智能車轉向,使用直流電機驅動智能車前進。系統采用符
發(fā)表于 07-06 16:57
?73次下載
MC9S12XSl28微控制器的智能車硬件設計
MC9S12XSl28微控制器的智能車硬件設計
以“飛思卡爾”杯智能車大賽為研究背景,采用MC9S12XSl28作為核心處理器,通過對比各個模塊不同設計方案的性能,完成
發(fā)表于 04-12 15:28
?2074次閱讀
基于光電管路徑識別的智能車系統設計
介紹了一種基于光電管路徑識別的智能車系統。該智能車使用光電管作為路徑識別裝置,依靠舵機輔助智能車轉向,使用直流電機驅動智能車前進。系統采用符
發(fā)表于 06-09 09:56
?3013次閱讀

智能車控制器功能有哪些
以簡單的智能車為例,一般會存在兩個控制器,一個是運行ROS的主控,另一個是運行電機控制和傳感器信息采集的單片機比如STM32。 以智能車的應






 工商網監(jiān)
工商網監(jiān)
評論