 機器人中都有哪些坐標系
機器人中都有哪些坐標系
坐標系是我們非常熟悉的一個概念,也是機器人學中的重要基礎,在一個完整的機器人系統中,會存在很多坐標系,這些坐標系之間的位置關系該如何管理?
機器人中的坐標系
機器人中都有哪些坐標系呢?

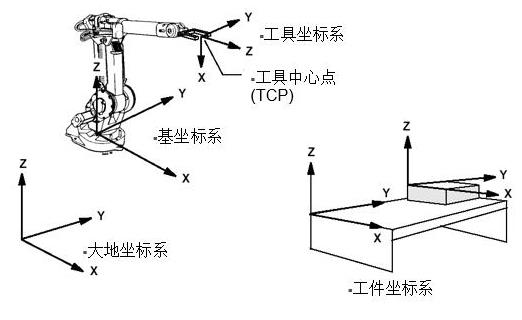
比如在機械臂形態的機器人中,機器人安裝的位置叫做基坐標系Base Frame,機器人安裝位置在外部環境下的參考系叫做世界坐標系World Frame,機器人末端夾爪的位置叫做工具坐標系,外部被操作物體的位置叫做工件坐標系,在機械臂抓取外部物體的過程中,這些坐標系之間的關系也在跟隨變化。
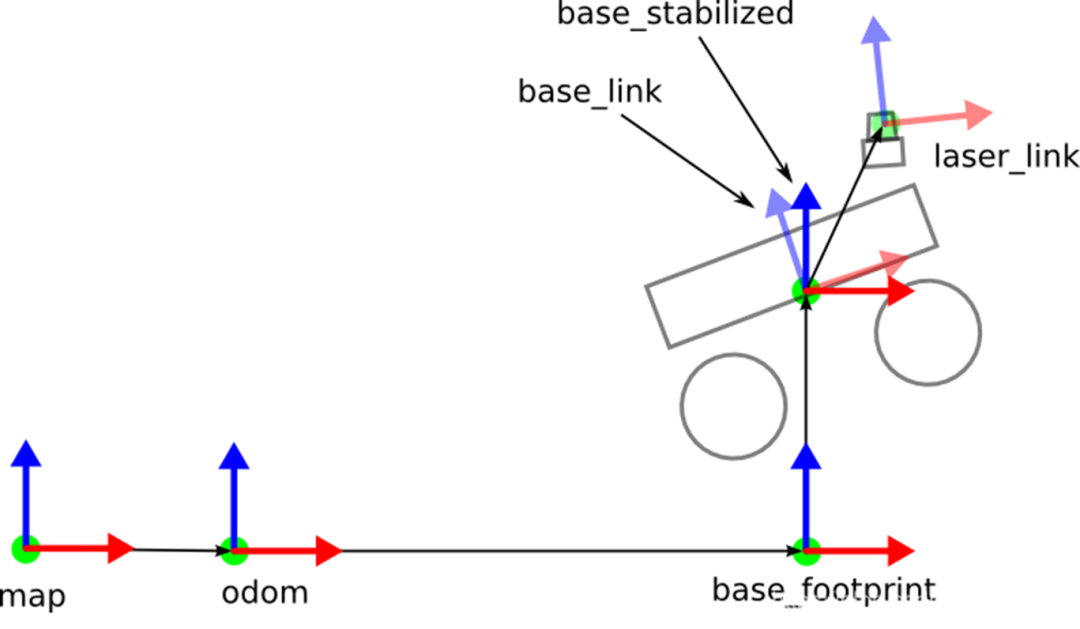
在移動機器人系統中,坐標系一樣至關重要,比如一個移動機器人的中心點是基坐標系Base Link,雷達所在的位置叫做雷達坐標系laser
link,機器人要移動,里程計會累積位置。
這個位置的參考系叫做里程計坐標系odom,里程計又會有累積誤差和漂移,絕對位置的參考系叫做地圖坐標系map。
一層一層坐標系之間關系復雜,有一些是相對固定的,也有一些是不斷變化的,看似簡單的坐標系也在空間范圍內變得復雜,良好的坐標系管理系統就顯得格外重要。
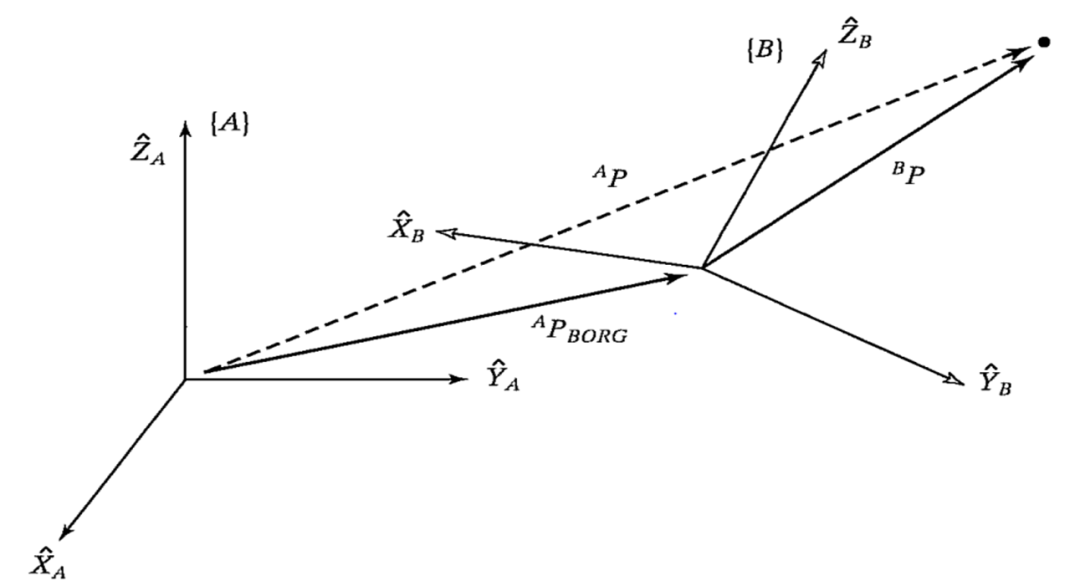
關于坐標系變換關系的基本理論,在每一本機器人學的教材中都會有講解,可以分解為平移和旋轉兩個部分,通過一個四乘四的矩陣進行描述,在空間中畫出坐標系,那兩者之間的變換關系,其實就是向量的數學描述。
ROS中TF功能的底層原理,就是對這些數學變換進行了封裝。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28641瀏覽量
208412 -
坐標系
+關注
關注
0文章
29瀏覽量
7356 -
移動機器人
+關注
關注
2文章
765瀏覽量
33648 -
ROS
+關注
關注
1文章
280瀏覽量
17096
發布評論請先 登錄
相關推薦
abb機器人工具坐標系問題
各位大佬請教一下,abb機器人工具坐標系用四點法,六點法,手動輸入等方式標定出的工具坐標系的Z方向與實際工具的長度不符,實際工具長度越長坐標系z方向的差距越大。比如實際工具400mm
發表于 08-07 11:11
介紹坐標系和機器人之間的紐帶即連桿坐標系
介紹坐標系以及它們之間的變換關系,數學的意味還是很濃的。講了那么多的公式和規律,它們要怎么用在機器人上呢?這篇文章將介紹坐標系和機器人之間的紐帶即連桿
發表于 09-01 06:17
幾大坐標系決定工業機器人精確性
坐標系包含:
1、基坐標系(Base Coordinate System)
2、大地坐標系(World Coordinate System)
3、工具坐標系(Tool Coord
發表于 04-02 11:31
?2086次閱讀
機器人基坐標系標定方法研究
針對借助激光跟蹤儀標定機器人所涉及的坐標系統一問題,對基于空間幾何法擬合建立的基坐標系與機器人理論基坐標系的轉換關系進行了研究,提出了一種基
發表于 03-07 10:43
?2次下載
機器人4大坐標系講解
任何機器人都離不開基坐標系,也是機器人TCP在三維空間運動空間所必須的基本坐標系(面對機器人前后:X軸 ,左右:Y軸, 上下:Z軸)。
機器人坐標系用法和算法原理
一般都會定義機器人第一軸的旋轉軸為基坐標系Z軸,旋轉中心即是坐標系原點,X和Y的方向是的電機零點確定,所以只要你不更換電機的零點和機械結構,單個機器人里這個基
發表于 05-11 15:57
?2014次閱讀

機器人坐標系選擇指令和操作步驟
在編程操作過程中,為了確定機器人的空間位置以及姿態的變化,需要建立合適的工具和用戶坐標系。工具坐標系用于確定每個工具中心點(TCP)的位置和工具姿勢。
發表于 05-12 14:43
?2277次閱讀

世界坐標系、相機坐標系、圖像坐標系、像素坐標系之間的關系
相機的成像過程涉及到四個坐標系:世界坐標系、相機坐標系、圖像坐標系、像素坐標系。這篇博客介紹相機的成像過程,以及四個



機器人坐標系Launch文件解析
Launch文件解析 先來看下剛才運行的launch文件,里邊啟動了四個節點,分別是: 小海龜仿真器 海龜1的坐標系廣播 海龜2的坐標系廣播 海龜跟隨控制 其中,兩個坐標系的廣播復用





 工商網監
工商網監
評論