") Matlab中如何繪制最優(yōu)路徑
Matlab中如何繪制最優(yōu)路徑
繪制最優(yōu)路徑
從目標(biāo)點(diǎn)開始,依次根據(jù)節(jié)點(diǎn)及父節(jié)點(diǎn)回推規(guī)劃的路徑直至起點(diǎn),要注意tree結(jié)構(gòu)體中parent的長度比child要小1。最后將規(guī)劃的路徑顯示在figure中。
%% 繪制最優(yōu)路徑
temp = tree.parent(end,:);
trajectory = [tree.child(end,1)-0.5*resolution, tree.child(end,2)-0.5*resolution];
for i=size(tree.child,1):-1:2
if(size(tree.child(i,:),2) ~= 0 & tree.child(i,:) == temp)
temp = tree.parent(i-1,:);
trajectory(end+1,:) = tree.child(i,:);
if(temp == x_start)
trajectory(end+1,:) = [temp(1,1) - 0.5*resolution, temp(1,2) - 0.5*resolution];
end
end
end
plot(trajectory(:,1), trajectory(:,2), '-r','LineWidth',2);
pause(2);
程序運(yùn)行最終效果如下:
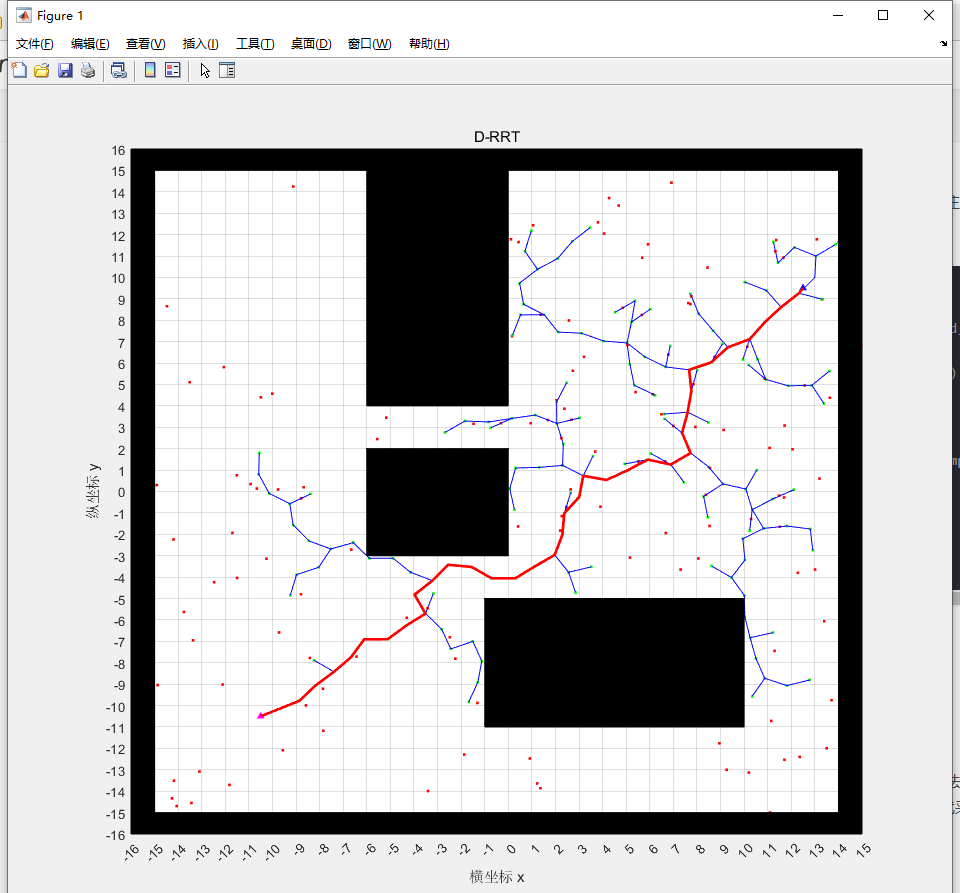
紅點(diǎn)都是生成點(diǎn)隨機(jī)點(diǎn),綠點(diǎn)是tree中節(jié)點(diǎn),紅色路徑即為RRT算法規(guī)劃的路徑。
路徑平滑(B樣條曲線)
由于規(guī)劃的路徑都是線段連接,在節(jié)點(diǎn)處路徑不平滑,這也是RRT算法的弊端之一。一般來說軌跡平滑的方法有很多種,類似于貝塞爾曲線,B樣條曲線等。
我在這采用B樣條曲線對規(guī)劃的路徑進(jìn)行平滑處理,具體的方法和原理我后續(xù)有時間再進(jìn)行說明,這里先給出結(jié)果:
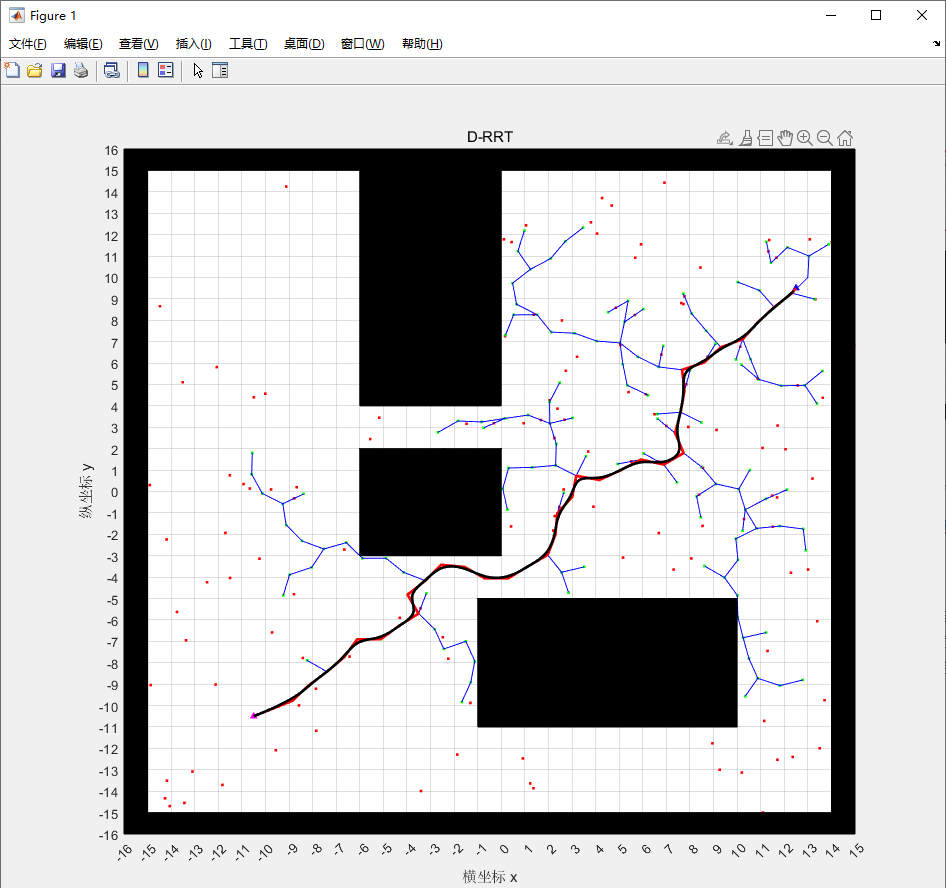
黑色曲線即位平滑處理后的路徑。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
matlab
+關(guān)注
關(guān)注
185文章
2981瀏覽量
231014 -
路徑規(guī)劃
+關(guān)注
關(guān)注
0文章
78瀏覽量
15347 -
RRT
+關(guān)注
關(guān)注
0文章
12瀏覽量
1124
發(fā)布評論請先 登錄
相關(guān)推薦
MATLAB圖形繪制基本技術(shù)教程
1 MATLAB基本二維圖形繪制2 plot 命令使用3 loglog、semilogx、semilogy、polar4 二維曲線的標(biāo)注5 二維圖形坐標(biāo)軸的控制6 其他類型的MATLAB二維圖形
發(fā)表于 09-04 08:23
求教螞蟻算法求最優(yōu)路徑的matlab方法
因為在網(wǎng)上找到很多的程序都是一些基于螞蟻算法求TSP問題的程序,還有些是運(yùn)行不了的,我想要一個基礎(chǔ)的程序,帶有一定的注釋就更好了,現(xiàn)在在學(xué)習(xí)螞蟻算法求最優(yōu)路徑的方法。PS:論文方面的有看過了,現(xiàn)在想要對照程序?qū)W習(xí)。謝謝
發(fā)表于 05-16 19:10
在LABVIEW中,用Matlab Scrip怎么調(diào)用Matlab中.m的函數(shù),怎么設(shè)置路徑
在LABVIEW中,用Matlab Scrip怎么調(diào)用Matlab中.m的函數(shù),怎么設(shè)置路徑,我是這樣設(shè)置
發(fā)表于 05-09 16:07
請問如何用Matlab把excel表格中的數(shù)據(jù)導(dǎo)入Matlab中并繪制出圖?
如何用Matlab把excel表格中的數(shù)據(jù)導(dǎo)入Matlab中并繪制出圖?
發(fā)表于 05-20 07:53
MATLAB圖形繪制基本技術(shù)
3.1 MATLAB基本二維圖形繪制3.2 plot 命令使用3.3 loglog、semilogx、semilogy、polar3.4 二維曲線的標(biāo)注3.5 二維圖形坐標(biāo)軸的控制3.6 其他類型的MATLAB二維圖形
發(fā)表于 09-03 12:15
?0次下載
MATLAB高級圖形繪制技術(shù)
MATLAB高級圖形繪制技術(shù)
5.1 其他二維圖形繪制命令5.2 其他三維圖形繪制命令5.3 句柄圖形繪制技術(shù)5.4 圖形可視編輯工具5.
發(fā)表于 09-03 12:17
?0次下載
MATLAB高級圖形繪制技術(shù)
MATLAB高級圖形繪制技術(shù)
5.1 其他二維圖形繪制命令5.2 其他三維圖形繪制命令5.3 句柄圖形繪制技術(shù)5.4 圖形可視編輯工具5.
發(fā)表于 09-03 12:18
?0次下載
matlab最優(yōu)化實(shí)驗
matlab最優(yōu)化實(shí)驗6.1知識要點(diǎn)與背景6.1.1 由簡入繁: 最佳水槽斷面問題的推廣 6.1.2 微分法求最大和最小
發(fā)表于 10-17 00:35
?2306次閱讀
繪制根軌跡的MATLAB函數(shù)介紹
繪制根軌跡的MATLAB函數(shù)介紹
4.4.1 rlocus
⒈.功能:繪制系統(tǒng)的根軌跡。
⒉.格式:
[r,k]=rlocus(
發(fā)表于 07-27 14:22
?7193次閱讀
Matlab最優(yōu)化方法
介紹最優(yōu)化方法,其中包括網(wǎng)絡(luò)最大流,指派問題,運(yùn)輸問題,最短路,關(guān)鍵路線法,以及二部圖的匹配問題。其使用方法有別于傳統(tǒng)方法,而是利用MATLAB構(gòu)造多個自編函數(shù),使所述問
發(fā)表于 11-30 16:41
?0次下載
基于改進(jìn)Dijkstra的端端密鑰協(xié)商最優(yōu)路徑選擇算法
針對量子密鑰分發(fā)(QKD)網(wǎng)絡(luò)端端密鑰協(xié)商路徑選擇問題,設(shè)計了一種基于改進(jìn)Dijkstra算法的端端密鑰協(xié)商最優(yōu)路徑選擇算法。首先,基于有效路徑策略,剔除網(wǎng)絡(luò)
發(fā)表于 12-27 16:58
?0次下載






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論