 用于粘液生理特性原位傳感的無線微型生物傳感器設計
用于粘液生理特性原位傳感的無線微型生物傳感器設計
生物粘液的生理特性是監測人類健康狀況和幫助了解疾病發展的重要生理指標,因為粘液特性(例如,粘度)與炎癥和其他疾病高度相關。然而,使用純醫學成像來感知粘液粘度目前仍然具有挑戰性。使用柔性內窺鏡和膠囊內窺鏡機器人在體外收集和分析粘液樣本方面非常具有挑戰性,因為它們難以進入非常狹窄、曲折和狹小的空間,并且樣本可能無法反映在人體內的真實粘液特性。
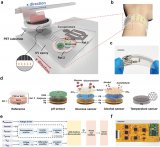
針對以上問題,美國范德比爾特大學(Vanderbilt University)董曉光教授領導的研究小組提出了一種新方法(圖1),可以通過由磁場驅動并由醫學成像跟蹤的無線微型傳感器來原位傳感粘液粘度。這些微型粘度傳感器可以通過控制磁場驅動毫米級軟體攀爬機器人遞送到指定區域。由于微型軟體機器人可以進入有限且狹窄的空間,并將傳感器可靠地部署在軟組織表面上,因此可以在軟生物組織上遞送多個傳感器來分布式傳感生物流體粘度。因此,所提出的微創機器人遞送和粘度傳感方法為傳感體內深處的生物流體特性以用于未來的疾病監測和早期診斷功能鋪平了道路。相關研究成果以“Sensing Mucus Physiological Property In Situ by Wireless Millimeter-Scale Soft Robots”為題發表在Advanced Functional Materials期刊上[1]。 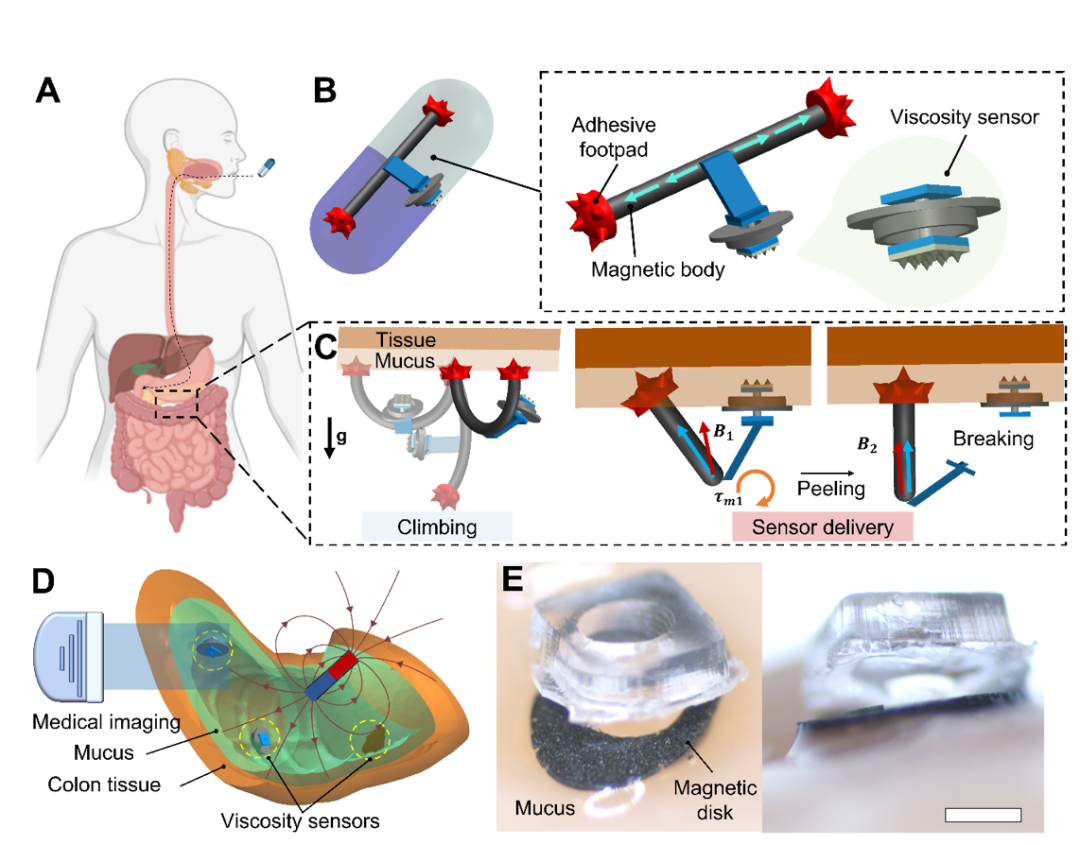
圖1 (A)磁場驅動的微型生物粘液粘度傳感器系統概述;(B)軟體機器人及無線粘度傳感器;(C)粘度傳感器的遞送過程;(D)多個粘度傳感器的工作示意圖;(E)粘度傳感器在消化道組織粘液上的圖片。
靈活的毫米級軟體攀爬機器人
為了遞送微型傳感器,該團隊開發了柔性的桿狀軟體機器人(圖2),它可以在粘液覆蓋的組織上運動,進而使用所攜帶的懸臂遞送梁遞送粘度傳感器。在三維外部磁場的驅動下,機器人可以在任意方向彎曲,機器人的攀爬運動則基于該團隊之前報道的剝離和裝載機制[2]。機器人的雙腳依靠生物粘附作用而粘附在組織表面。微型傳感器可以粘附在組織表面,然后通過一種可控的機械配合方式來脫離軟體機器人,這種新穎的遞送機制允許通過以微創方式控制毫米級軟體攀爬機器人來遞送無線微型傳感器。
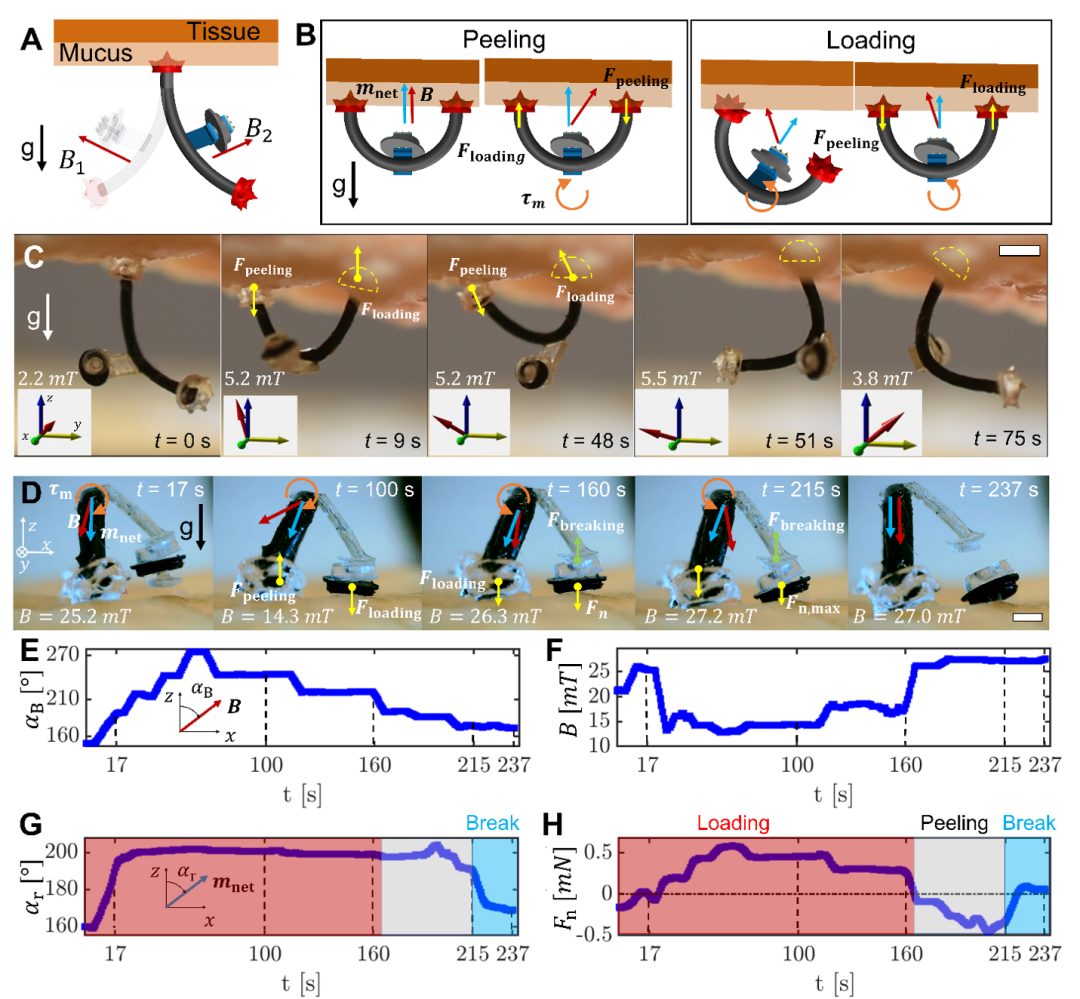
圖2 控制機器人的攀爬運動以及遞送粘度傳感器:(A)軟體攀爬機器人在軟組織上的全向可操縱性;(B)剝離和加載機制示意圖;(C)機器人在豬結腸組織上的攀爬運動;(D)基于軟體機器人的傳感器遞送過程。
無線磁場驅動液體粘度傳感器的機理
這種新型無線微型傳感器可以感測消化道組織器官深處的粘液特性。圖3顯示了粘度傳感器的理論推導、校準方法和傳感過程。傳感器錨定在粘液層上后,磁性旋轉器部分將接觸粘液層。磁性旋轉器由磁環和磁盤組成,借助毛細管力被粘液潤濕。液體的粘滯系數可以進而通過觀測磁盤和外加磁場之間的偏轉角來獲得。在人體內,可以通過X射線成像進行離體可視化,進而在豬結腸組織的粘液中(圖4)測試傳感器。粘液粘度傳感結果已得到其他先進測量工具的進一步驗證。
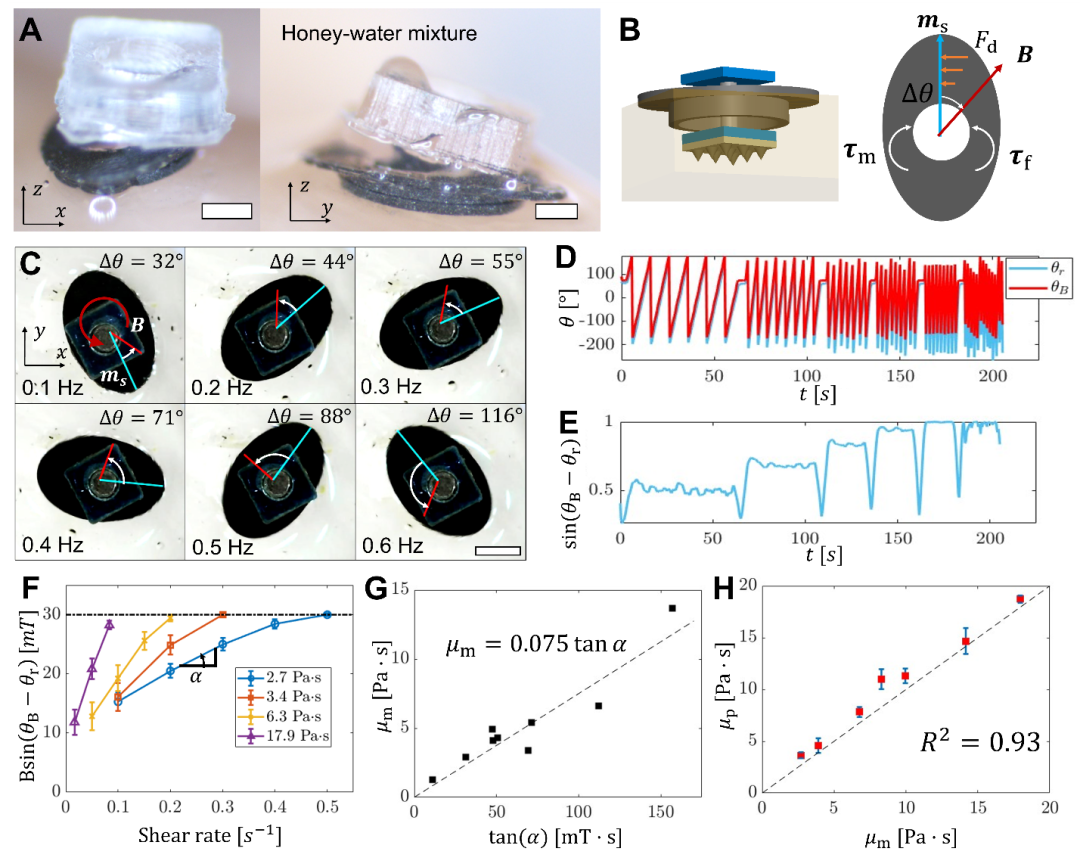
圖3 磁場驅動粘度傳感器的粘度傳感特性:(A)將粘度傳感器固定在豬結腸組織粘液層上的實驗圖像;(B)施加在傳感器磁性旋轉器上的剛體扭矩和力的圖示;(C)傳感器在不同頻率的旋轉外部磁場驅動的蜂蜜水混合物中旋轉的圖像;(D)粘度傳感過程的磁矩和外部磁場的方向;(E)用于粘度傳感過程的磁場和磁矩之間的角度差的正弦;(F)不同剪切速率下垂直于傳感器探頭磁矩的外部磁場分量的校準曲線;(G)不同粘度的蜂蜜水混合物的校準曲線的斜率;(H)在不同粘度的蜂蜜-水混合物中預測粘度作為測量粘度的函數。
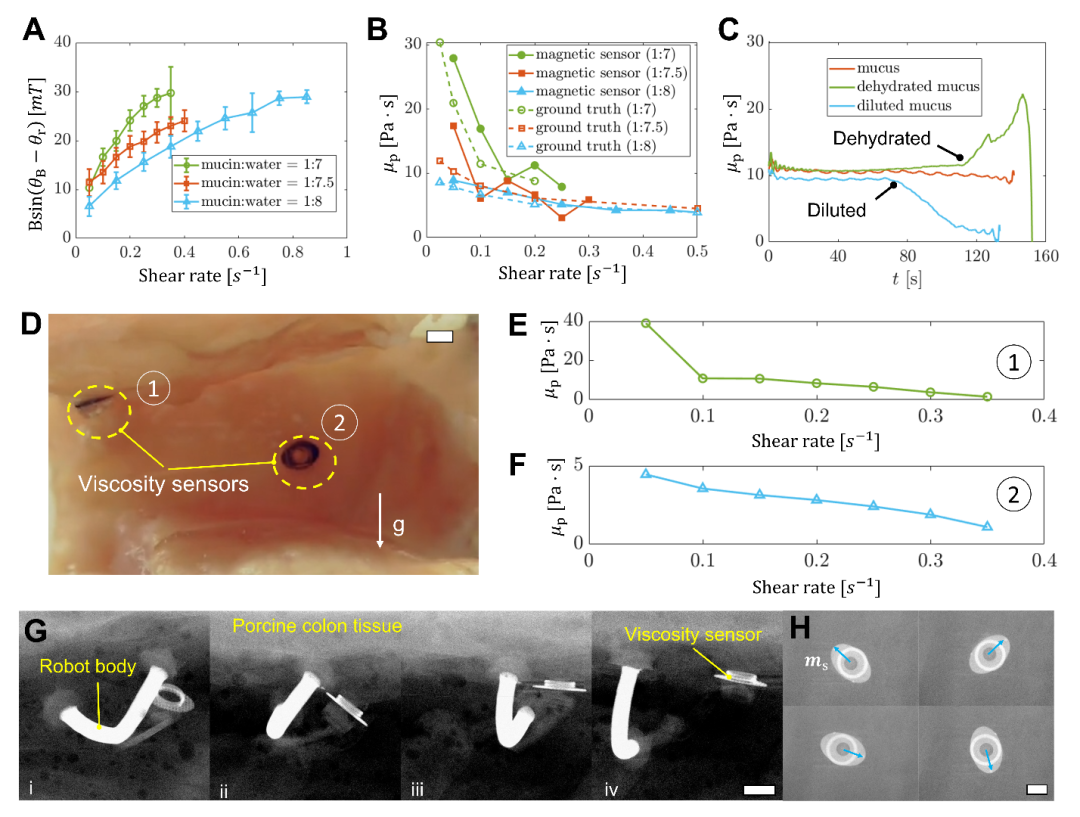
圖4 離體豬組織粘液粘度檢測和X射線引導下的機器人運動:(A)傳感器信號輸出作為不同水-粘蛋白比率的粘液剪切速率的函數;(B)使用磁性粘度傳感器預測的粘液粘度和使用商用粘度計測量的粘度作為剪切速率的函數;(C)預測的隨時間變化的粘液粘度作為時間的函數;(D)部署在豬結腸組織頂部和垂直表面上的兩個傳感器的粘度傳感過程的圖像;預測的粘液粘度作為傳感器 1(E)和傳感器2(F)剪切速率的函數;(G)機器人攀爬豬結腸組織和傳感器部署過程的連續X射線醫學圖像。(i)攀爬運動;(ii)傳感器負載;(iii、iv)傳感器分離;(H)使用所部署的粘度傳感器進行粘度傳感過程的連續X射線醫學圖像。
與其他粘度傳感器相比,以上無線微型粘度傳感器可以以微創的方式部署在生物組織的目標位置,并具有相對較長的停留時間,這有希望用于人體內的應用。相比之下,大多數基于壓電振動器的粘度傳感器不能無線驅動,無法用于體內長期監測。其他基于光學或毛細管效應的粘度傳感器分別依賴于復雜的光控制單元和微流控通道,這些僅在體外應用中得到證明,限制了它們在體內環境中的應用。除此之外,磁性納米線已被證明可以通過結合體外光學成像來感知粘液粘度,但它缺乏在體內應用中長期保留在生物組織上的能力。
該團隊未來還將在豬器官中對機器人和粘度傳感器進行體內測試,以進一步驗證遞送和傳感機制的有效性。這些軟體攀爬機器人的攀爬能力允許將粘度傳感器遞送到胃腸道中難以到達的位置,從而能夠將傳感器精確地定向遞送到不同的胃腸道位置,從而通過遞送多個傳感器來構建傳感器網絡。傳感器的磁場驅動和基于醫學成像的運動跟蹤允許在身體深處進行傳感。此外,雖然作者在這項工作中演示了粘度傳感器的遞送,但所提出的傳感器遞送機制也可用于遞送其他無線傳感器來感測溫度、pH值和其他生理特性。該工作可以啟發其他由磁場驅動的軟微型機器人和其他不受束縛的軟體機器人,以便在有限的環境中有針對性地交付多功能傳感器以構建傳感器網絡。因此,所提出的方法為長期、連續監測和微創跟蹤生理特性鋪平了道路,以幫助了解疾病發展并提供早期診斷。
審核編輯:劉清
-
無線傳感器
+關注
關注
15文章
770瀏覽量
98518 -
生物傳感器
+關注
關注
12文章
374瀏覽量
37452 -
振動器
+關注
關注
1文章
36瀏覽量
6519 -
軟體機器人
+關注
關注
1文章
111瀏覽量
11764
原文標題:用于粘液生理特性原位傳感的無線微型生物傳感器
文章出處:【微信號:Micro-Fluidics,微信公眾號:微流控】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
生物傳感器的主要組成包括_生物傳感器的分類
三星注資Pison,加速神經生物傳感器技術創新
生物傳感器:科技前沿的生物監測利器
#新品# ST1VAFE3BX生物傳感器(帶vAFE)
高可調性材料:Haydale生物傳感器油墨,打造靈活定制化印刷解決方案
Aigtek功率放大器如何幫助納米電子生物傳感器更好的研發和生產
電化學生物傳感器在生物檢測領域的顯著優勢
三郡科技:電化學生物傳感器電極與生物芯片的異同
便攜快速檢測的電化學生物傳感器:顛覆性變革生物檢測方式
生物醫學領域的傳感器有哪些?
安泰ATA-2161高壓放大器在生物傳感器研究中的應用
用于原位監測汗液標志物的全打印、多模態可穿戴生物傳感器陣列





 工商網監
工商網監
評論