") 硬核,從零制作一個(gè)激光雷達(dá)需要多久?
硬核,從零制作一個(gè)激光雷達(dá)需要多久?
激光雷達(dá)(LiDAR)是激光探測及測距系統(tǒng)的簡稱,目前廣泛應(yīng)用在無人駕駛和掃地機(jī)器人等領(lǐng)域。這種廣泛的應(yīng)用一方面得益于激光雷達(dá)的性能提升,一方面也得益于其成本的下降。 根據(jù)掃描方式,激光雷達(dá)可分為 MEMS 型、Flash 型、相控陣型、機(jī)械旋轉(zhuǎn)型;根據(jù)線數(shù),可分為單線型和多線型: 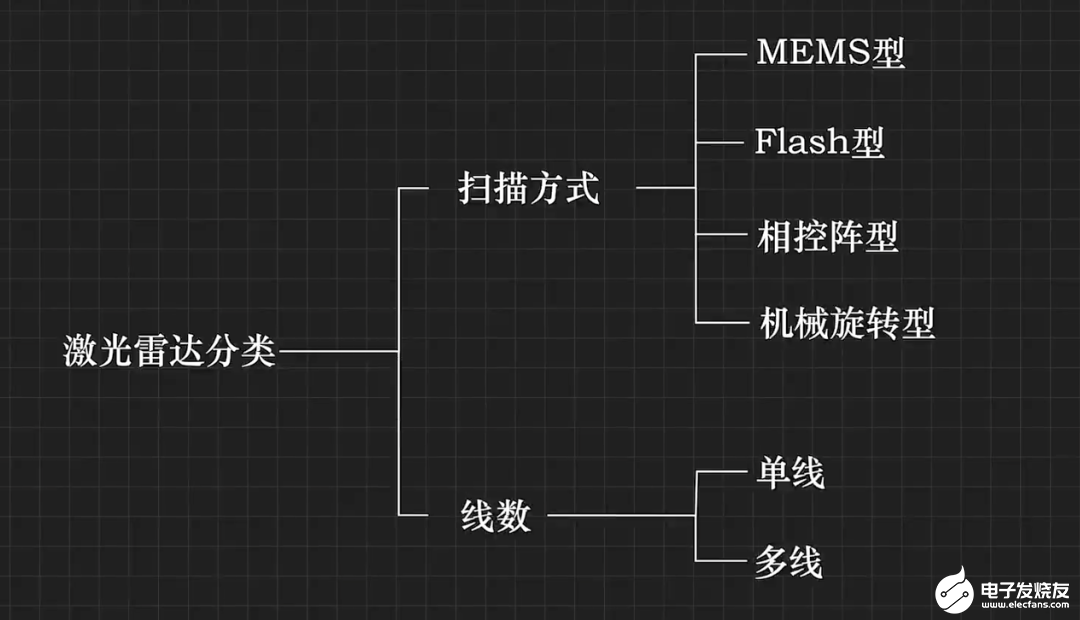 ? 話說回來,有沒有可能自制一個(gè)激光雷達(dá)?B 站的一位硬核 UP 主「不想宅的技術(shù)宅」還真就把這個(gè)小目標(biāo)實(shí)現(xiàn)了。
? 話說回來,有沒有可能自制一個(gè)激光雷達(dá)?B 站的一位硬核 UP 主「不想宅的技術(shù)宅」還真就把這個(gè)小目標(biāo)實(shí)現(xiàn)了。
UP 主用了大半年的業(yè)余時(shí)間,用一個(gè)激光測距傳感器整出了一個(gè)單線機(jī)械旋轉(zhuǎn)式激光雷達(dá),總共包括硬件設(shè)計(jì)、結(jié)構(gòu)設(shè)計(jì)、FPGA 開發(fā)和 3D 打印幾個(gè)步驟。對于 UP 主來說,這不算是新的挑戰(zhàn),只能算是「把以前學(xué)過的東西復(fù)習(xí)了一遍」:  ? 雖然 UP 主很謙虛,但很多人播放完視頻之后,只能表示「不懂,但受到震撼」: ?
? 雖然 UP 主很謙虛,但很多人播放完視頻之后,只能表示「不懂,但受到震撼」: ?  ? 做一個(gè)激光雷達(dá),需要哪些基本部件? UP 主選用了一款 FPGA 開發(fā)板,主芯片為 Xilinx ZYNQ7000,板上搭載了一個(gè)最高可輸出 1080p60 幀視頻的 HDMI 接口、32 個(gè) GPIO(通用輸入輸出接口)等其他外設(shè)。在這塊開發(fā)板上,將要完成雷達(dá)數(shù)據(jù)的采集、運(yùn)算和顯示。
? 做一個(gè)激光雷達(dá),需要哪些基本部件? UP 主選用了一款 FPGA 開發(fā)板,主芯片為 Xilinx ZYNQ7000,板上搭載了一個(gè)最高可輸出 1080p60 幀視頻的 HDMI 接口、32 個(gè) GPIO(通用輸入輸出接口)等其他外設(shè)。在這塊開發(fā)板上,將要完成雷達(dá)數(shù)據(jù)的采集、運(yùn)算和顯示。 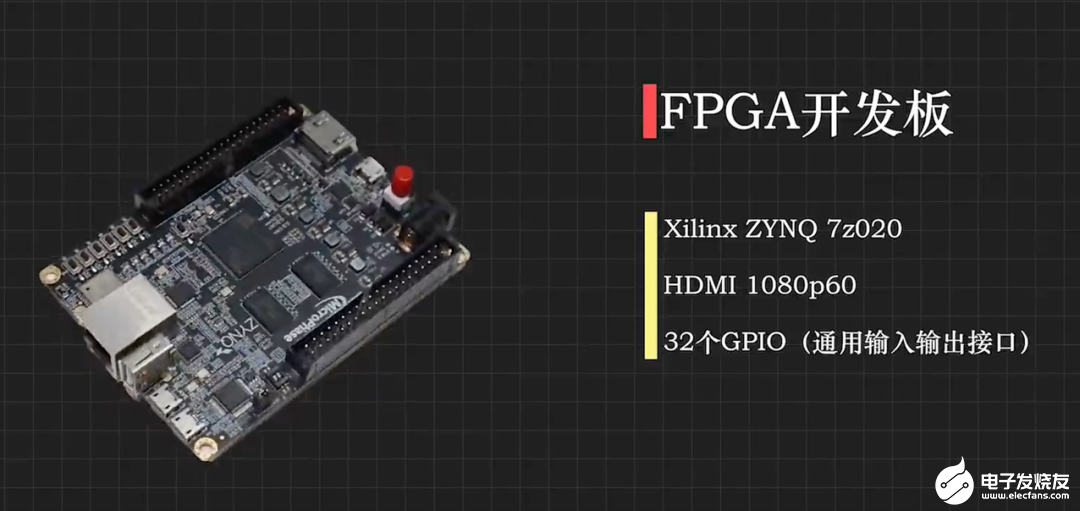
此外還有一個(gè)直流減速機(jī),額定電壓為 12V,減速比為 1:30,最大輸出轉(zhuǎn)速為 300 轉(zhuǎn)每分鐘,電機(jī)尾部安裝了 500 線的光電編碼器,通過光電編碼器可以獲知輸出軸的轉(zhuǎn)動(dòng)角度。 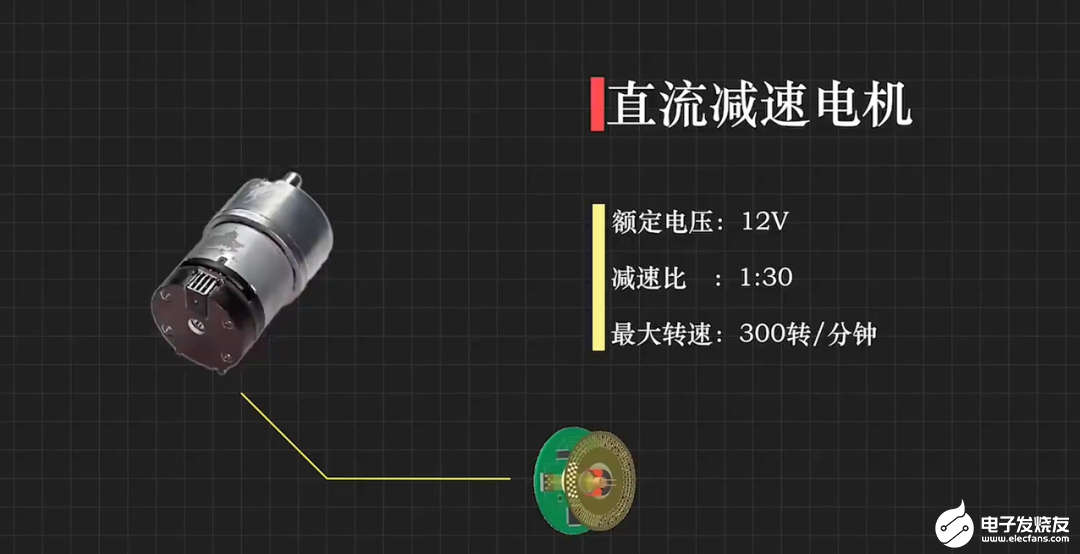
最后,還有一個(gè)激光測距傳感器,測距精度為 1cm,量程為 12m,每秒鐘可以測量 1000 次,輸出接口為串口。 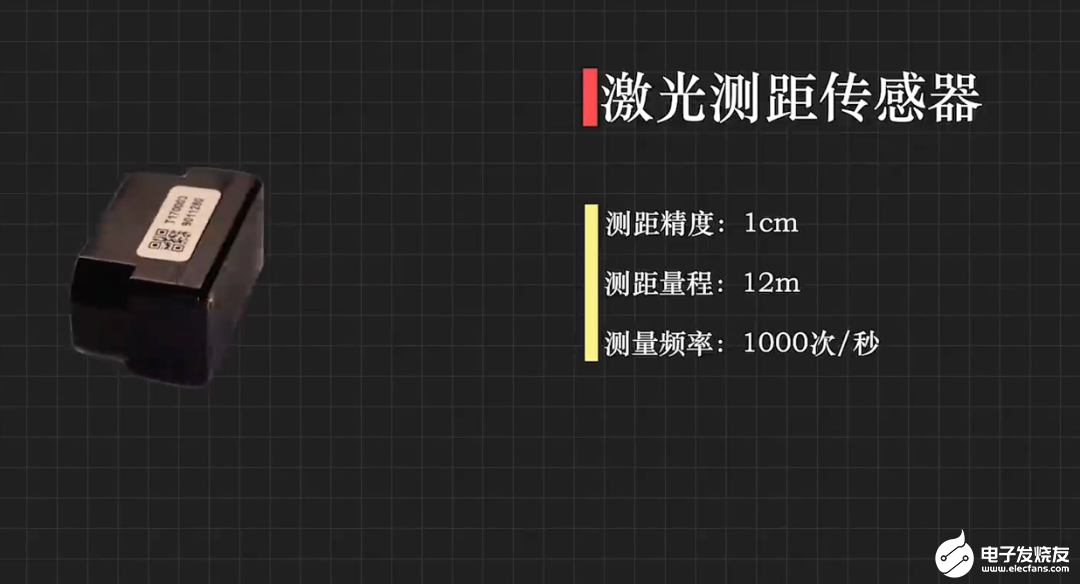 ? 這些就是自制激光雷達(dá)所需要的基本部件,然后就是結(jié)構(gòu)設(shè)計(jì)的問題了。 ? 結(jié)構(gòu)設(shè)計(jì) UP 主表示,激光雷達(dá)在工作時(shí),探頭需要連續(xù)旋轉(zhuǎn),因此探頭和底座的信號(hào)傳輸無法用導(dǎo)線連接,否則會(huì)引發(fā)纏繞問題,他通過導(dǎo)電滑環(huán)解決了這個(gè)問題。導(dǎo)電滑環(huán)內(nèi)部是一組電刷,可以解決信號(hào)線在旋轉(zhuǎn)情況下的纏繞問題:
? 這些就是自制激光雷達(dá)所需要的基本部件,然后就是結(jié)構(gòu)設(shè)計(jì)的問題了。 ? 結(jié)構(gòu)設(shè)計(jì) UP 主表示,激光雷達(dá)在工作時(shí),探頭需要連續(xù)旋轉(zhuǎn),因此探頭和底座的信號(hào)傳輸無法用導(dǎo)線連接,否則會(huì)引發(fā)纏繞問題,他通過導(dǎo)電滑環(huán)解決了這個(gè)問題。導(dǎo)電滑環(huán)內(nèi)部是一組電刷,可以解決信號(hào)線在旋轉(zhuǎn)情況下的纏繞問題: 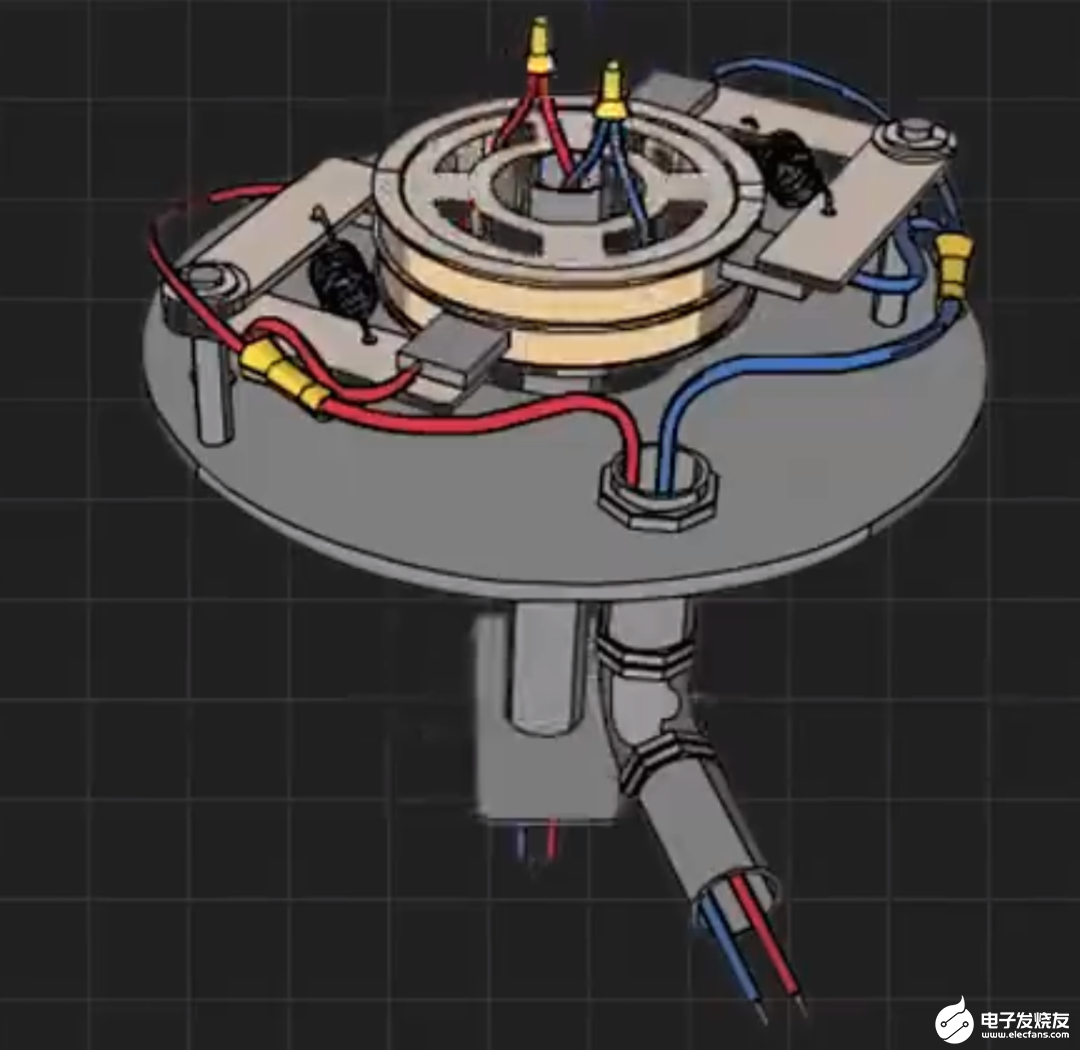
 ? 如此,激光雷達(dá)就設(shè)計(jì)好了: ?
? 如此,激光雷達(dá)就設(shè)計(jì)好了: ?
整個(gè)激光雷達(dá)分為底座和探頭,探頭和底座通過旋轉(zhuǎn)軸進(jìn)行連接,激光測距傳感器通過螺絲固定在探頭基座上。

探頭基座內(nèi)部還固定有轉(zhuǎn)子 PCB,底座部分固定有導(dǎo)電滑環(huán)、電機(jī)和定子 PCB。
在實(shí)際裝配時(shí),電機(jī)輸出軸和導(dǎo)電滑環(huán)和旋轉(zhuǎn)中心因?yàn)檎`差關(guān)系大概率不會(huì)處于同一軸心上,這里使用了一個(gè)彈性連軸器來補(bǔ)償軸向偏差: 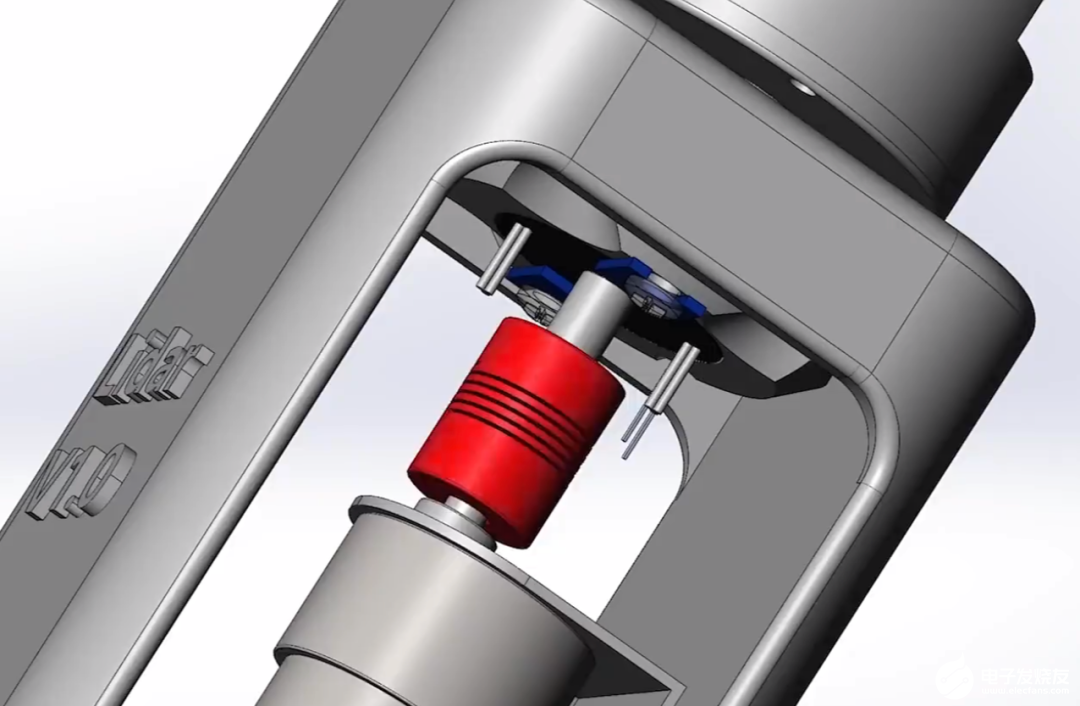 ? 探頭和底座之間設(shè)計(jì)了一對紅外對管,用來確定探頭轉(zhuǎn)動(dòng)的初始位置: ?
? 探頭和底座之間設(shè)計(jì)了一對紅外對管,用來確定探頭轉(zhuǎn)動(dòng)的初始位置: ?

至此,結(jié)構(gòu)設(shè)計(jì)就完成了。隨后將設(shè)計(jì)好的結(jié)構(gòu)件在 3D 打印軟件中添加支撐,然后切片,最后通過 3D 打印機(jī)打印出來。打印好的探頭基座、探頭蓋和底座就是這樣:  ? 硬件電路設(shè)計(jì) 整體框架如圖所示,包含定子 PCB 和轉(zhuǎn)子 PCB:
? 硬件電路設(shè)計(jì) 整體框架如圖所示,包含定子 PCB 和轉(zhuǎn)子 PCB: 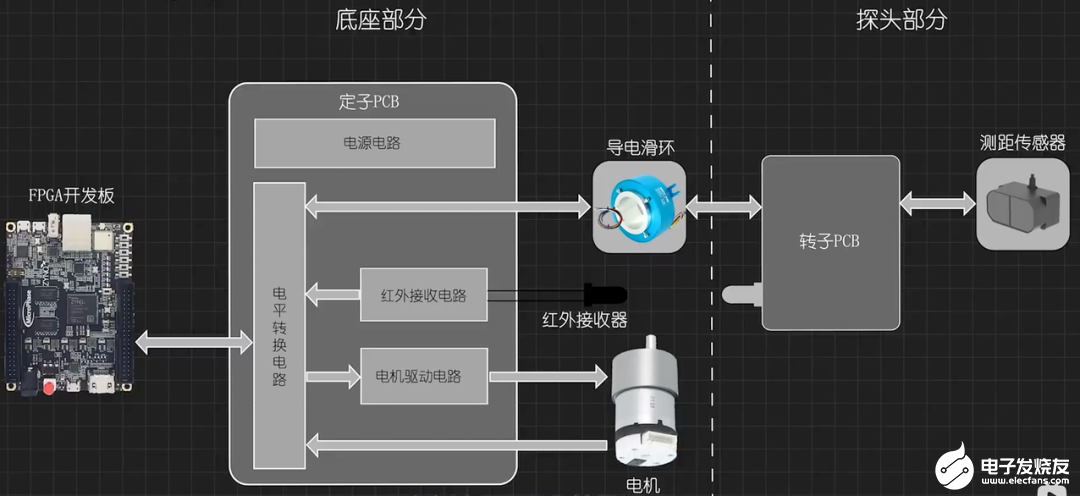 ? 下圖是整個(gè)電源以及隔離設(shè)計(jì)的框圖,整個(gè)電機(jī)控制部分和其他電路沒有實(shí)際的連接,電機(jī)在工作時(shí)不會(huì)干擾其他電路: ?
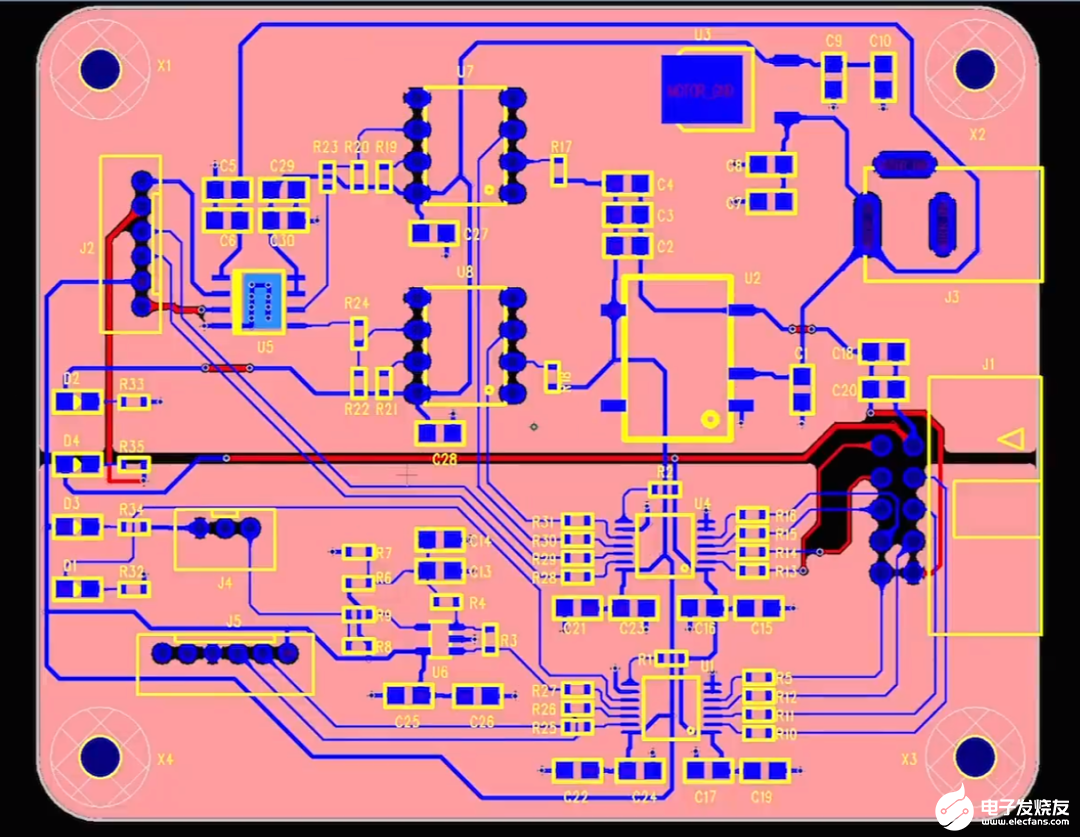
? 下圖是整個(gè)電源以及隔離設(shè)計(jì)的框圖,整個(gè)電機(jī)控制部分和其他電路沒有實(shí)際的連接,電機(jī)在工作時(shí)不會(huì)干擾其他電路: ? 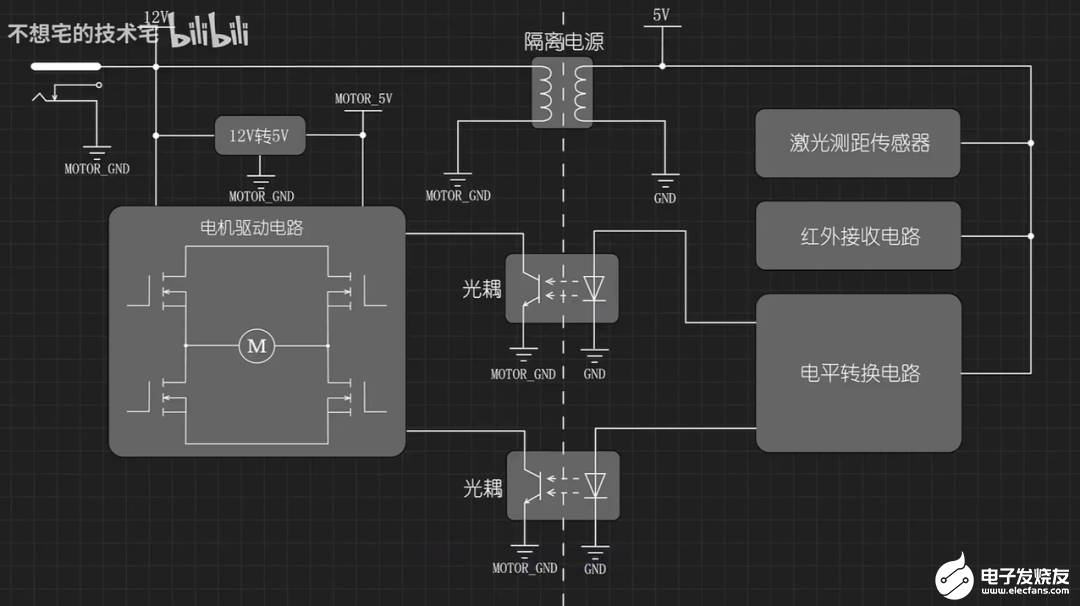 ? 再之后是 PCB 設(shè)計(jì): ?
? 再之后是 PCB 設(shè)計(jì): ? 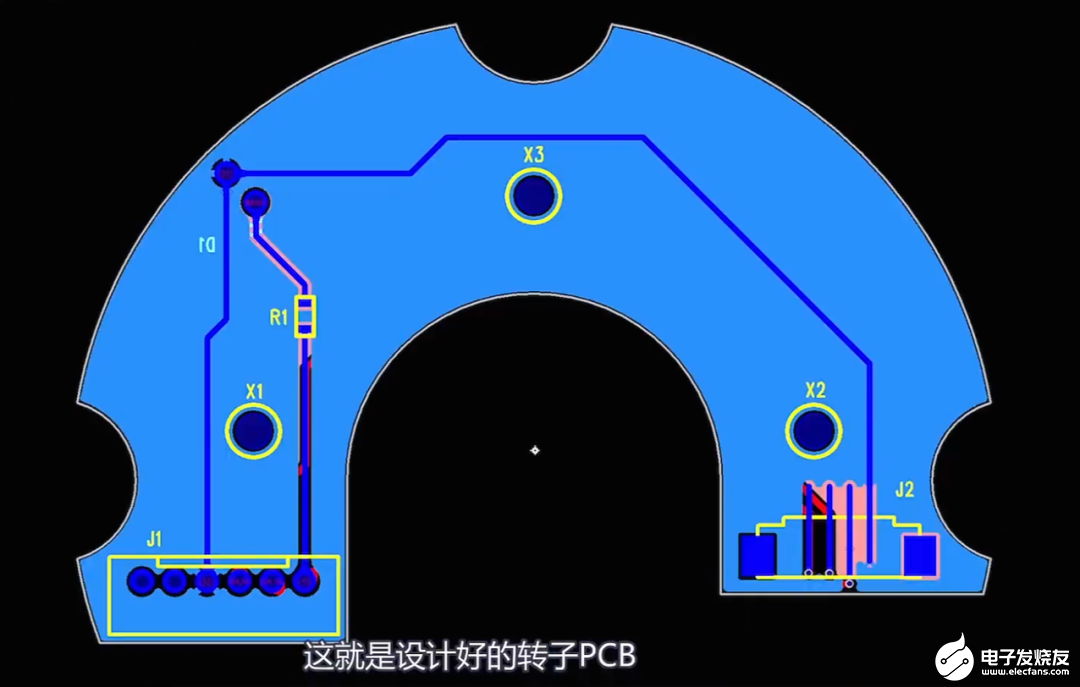 ?
?  ? 一番裝配之后(此處省略一萬個(gè)步驟),激光雷達(dá)就做好了: ?
? 一番裝配之后(此處省略一萬個(gè)步驟),激光雷達(dá)就做好了: ?

激光雷達(dá)和 FGPA 之間通過排線進(jìn)行通信。在軟件設(shè)計(jì)上,分為兩部分:PS 側(cè)的嵌入式開發(fā),以及 PL 側(cè)的 FPGA 開發(fā),相比之下,PL 側(cè)的開發(fā)顯得比較復(fù)雜。整體框圖如下: 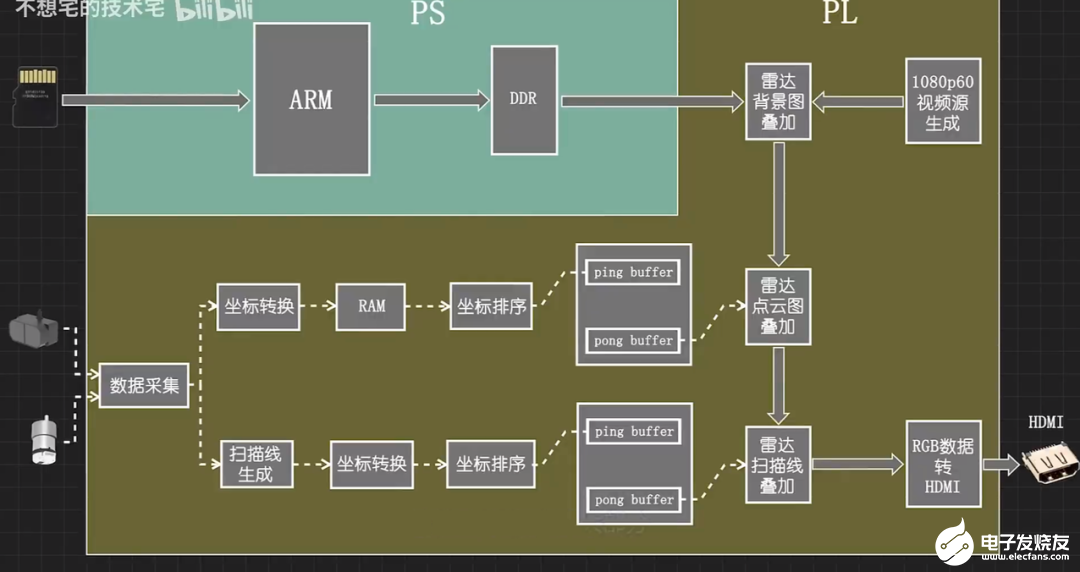 ? 而主要的難度恰恰在于 FPGA 部分。UP 主表示:「要把雷達(dá)數(shù)據(jù)疊加在視頻數(shù)據(jù)流上,費(fèi)了我不少腦細(xì)胞。」 ? 最后,看下實(shí)際運(yùn)行效果 受限于激光測距傳感器測量頻率,探頭轉(zhuǎn)動(dòng)一圈采集 500 個(gè)點(diǎn)的數(shù)據(jù),所以激光雷達(dá)的掃描頻率只能做到 2Hz 每秒。 為了視覺效果,UP 主加上了雷達(dá)掃描線,最終實(shí)現(xiàn)的效果還是不錯(cuò)的:
? 而主要的難度恰恰在于 FPGA 部分。UP 主表示:「要把雷達(dá)數(shù)據(jù)疊加在視頻數(shù)據(jù)流上,費(fèi)了我不少腦細(xì)胞。」 ? 最后,看下實(shí)際運(yùn)行效果 受限于激光測距傳感器測量頻率,探頭轉(zhuǎn)動(dòng)一圈采集 500 個(gè)點(diǎn)的數(shù)據(jù),所以激光雷達(dá)的掃描頻率只能做到 2Hz 每秒。 為了視覺效果,UP 主加上了雷達(dá)掃描線,最終實(shí)現(xiàn)的效果還是不錯(cuò)的:
目前,UP 主已經(jīng)把視頻中激光雷達(dá)的結(jié)構(gòu)和 pcb 設(shè)計(jì)文件上傳到 Github 平臺(tái),想要做一個(gè)玩玩的小伙伴可以去下載。 項(xiàng)目傳送門:https://github.com/Messi-xiong/LiDAR.git
審核編輯 黃宇
-
傳感器
+關(guān)注
關(guān)注
2553文章
51388瀏覽量
756556 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
4025瀏覽量
190401 -
LIDAR
+關(guān)注
關(guān)注
10文章
328瀏覽量
29530
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論