") 點(diǎn)激光和線激光的區(qū)別是什么
點(diǎn)激光和線激光的區(qū)別是什么
隨著科技的蓬勃發(fā)展,激光技術(shù)已經(jīng)成為眾多領(lǐng)域中不可或缺的工具。在激光技術(shù)的廣泛應(yīng)用中,點(diǎn)激光和線激光作為兩種最為常見的形式,它們?cè)诟鞣矫娲嬖谥@著的區(qū)別,今天創(chuàng)想激光位移傳感器小編就給大家介紹一下。
一、工作原理
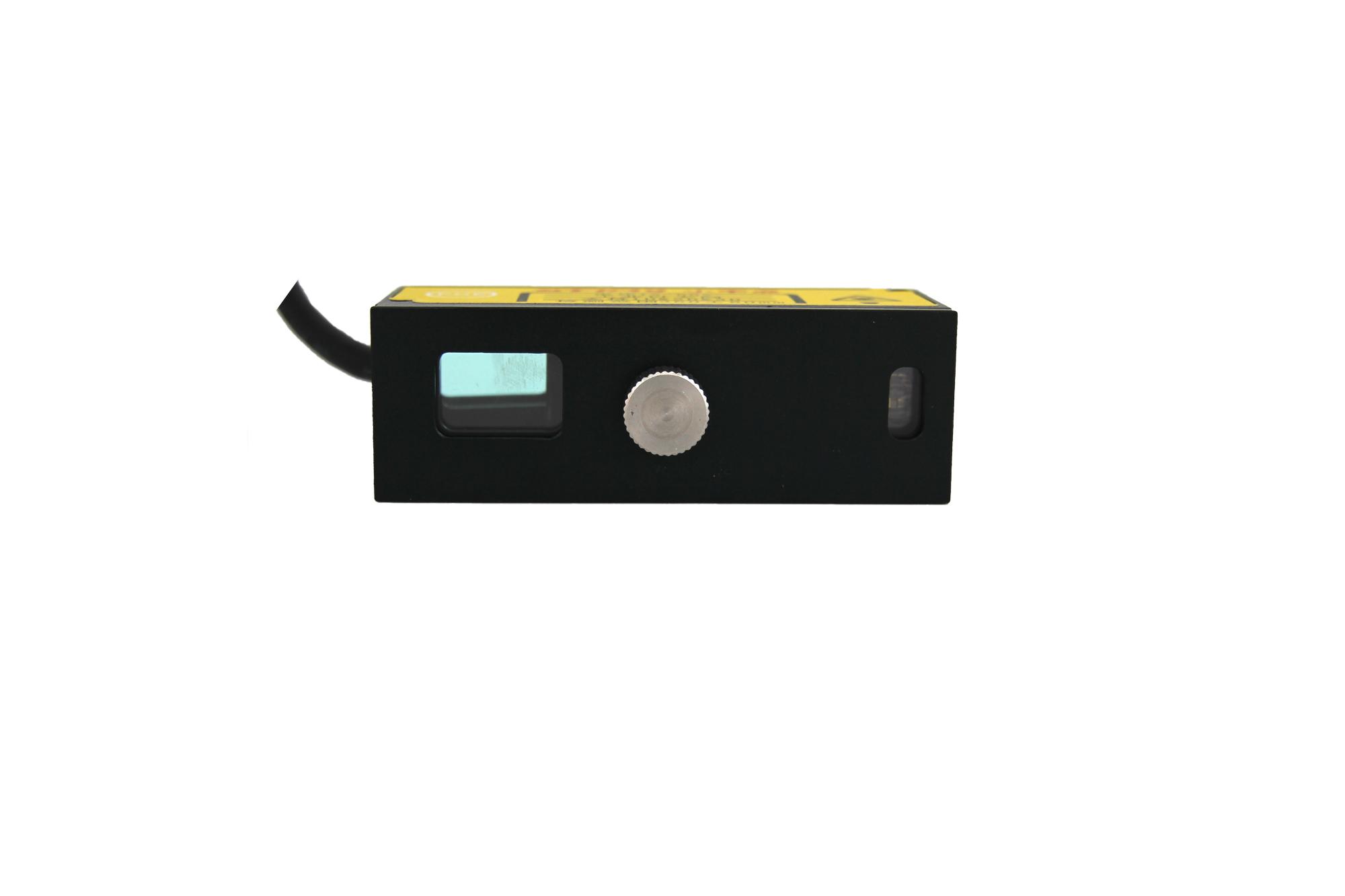
點(diǎn)激光,作為一種單點(diǎn)測(cè)量技術(shù),通常利用單一的激光光源和一個(gè)接收器。當(dāng)激光照射到物體表面時(shí),反射的光線被接收器接收并轉(zhuǎn)換為電信號(hào),通過測(cè)量這個(gè)信號(hào)可以確定激光點(diǎn)的位置和高度。點(diǎn)激光的工作原理主要基于三角反射或時(shí)間飛行原理。
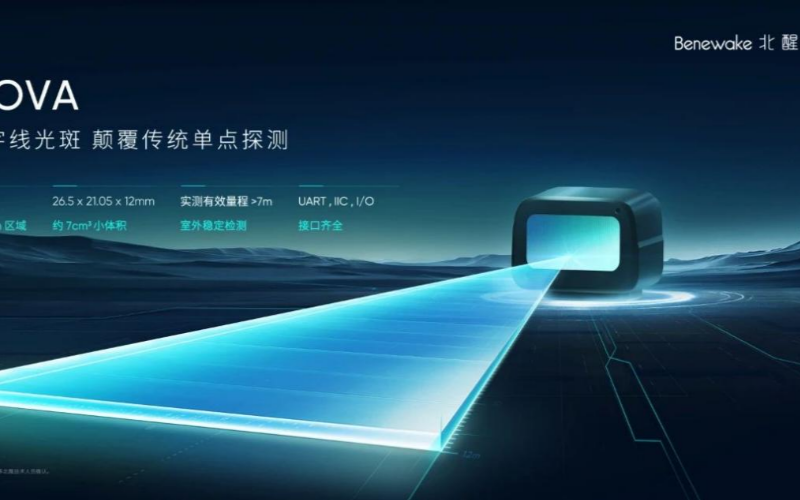
線激光,則是一種線性測(cè)量技術(shù),利用一個(gè)激光器和一個(gè)特殊的掃描棱鏡來形成一條線形的光束。當(dāng)掃描棱鏡旋轉(zhuǎn)時(shí),激光線會(huì)掃描物體表面,形成一個(gè)連續(xù)的線狀掃描帶。通過測(cè)量每個(gè)點(diǎn)的位置和高度,可以獲得物體的二維或三維形狀。線激光的工作原理與點(diǎn)激光相似,同樣基于三角反射或時(shí)間飛行原理。
二、應(yīng)用領(lǐng)域
點(diǎn)激光由于其高精度和快速響應(yīng)的特點(diǎn),廣泛應(yīng)用于高精度測(cè)量和定位場(chǎng)景,如表面輪廓測(cè)量、三維重建、機(jī)器人視覺和自動(dòng)駕駛等。
線激光則能夠快速獲取物體的連續(xù)二維或三維形狀信息,因此在表面輪廓測(cè)量、大型物體檢測(cè)、機(jī)器人路徑規(guī)劃等領(lǐng)域有廣泛應(yīng)用。此外,線激光還可用于地圖測(cè)繪、建筑測(cè)量等領(lǐng)域。

三、優(yōu)缺點(diǎn)比較
點(diǎn)激光的優(yōu)勢(shì)在于精度高、響應(yīng)速度快、結(jié)構(gòu)簡(jiǎn)單等,但其缺點(diǎn)在于只能測(cè)量一個(gè)點(diǎn),對(duì)于大面積或連續(xù)的物體測(cè)量效率較低。
線激光的優(yōu)勢(shì)在于可以快速獲取物體的連續(xù)二維或三維形狀信息,適用于大面積或連續(xù)物體的測(cè)量。然而,其缺點(diǎn)在于結(jié)構(gòu)復(fù)雜、成本較高,對(duì)于某些細(xì)節(jié)部分的測(cè)量精度可能不如點(diǎn)激光。
四、發(fā)展趨勢(shì)
隨著技術(shù)的不斷進(jìn)步和應(yīng)用需求的增長(zhǎng),點(diǎn)激光和線激光都將迎來更為廣闊的發(fā)展前景。未來,它們將不斷優(yōu)化性能,提高測(cè)量精度和效率,拓展應(yīng)用領(lǐng)域。同時(shí),隨著人工智能、機(jī)器學(xué)習(xí)等技術(shù)的快速發(fā)展,點(diǎn)激光和線激光也將在智能化方面取得突破,實(shí)現(xiàn)更加自動(dòng)化、智能化的測(cè)量和識(shí)別。

點(diǎn)激光和線激光在工作原理、應(yīng)用領(lǐng)域、優(yōu)缺點(diǎn)以及發(fā)展趨勢(shì)等方面存在明顯的區(qū)別。在實(shí)際應(yīng)用中,選擇合適的激光技術(shù)取決于具體的需求,以達(dá)到最佳的測(cè)量效果。這兩種激光技術(shù)的蓬勃發(fā)展將為科技進(jìn)步和各行各業(yè)的創(chuàng)新提供強(qiáng)大的支持。
審核編輯:湯梓紅
-
激光器
+關(guān)注
關(guān)注
17文章
2540瀏覽量
60709 -
激光技術(shù)
+關(guān)注
關(guān)注
2文章
224瀏覽量
22295 -
線激光
+關(guān)注
關(guān)注
0文章
14瀏覽量
6252
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
CES 2025激光雷達(dá)觀察:“千線”激光雷達(dá)亮相,頭部廠商布局具身智能

半導(dǎo)體激光器和光纖激光器的對(duì)比分析
激光焊錫和激光焊接的原理區(qū)別

一字線光斑激光雷達(dá),開拓創(chuàng)新應(yīng)用賽道?
點(diǎn)錫膏激光焊接和送錫絲激光焊接如何選擇
電子科普!什么是激光二極管(半導(dǎo)體激光器)
激光焊接工藝有哪些?
激光錫膏和普通錫膏在焊接過程中有哪些區(qū)別?

光學(xué)雷達(dá)和激光雷達(dá)的區(qū)別是什么
激光雷達(dá)點(diǎn)云數(shù)據(jù)包含哪些信息
lidar傳感器和激光測(cè)距傳感器的區(qū)別
手機(jī)零件產(chǎn)線測(cè)量:線激光測(cè)量?jī)x
激光切割機(jī)和激光切管機(jī)在金屬加工應(yīng)用領(lǐng)域的區(qū)別
基于FPGA的激光雷達(dá)控制板

激光打標(biāo)機(jī)紅光與激光不重合:原因及解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論