") 什么是PID控制器?PID控制器積分控制介紹
什么是PID控制器?PID控制器積分控制介紹
PID,就是“比例(proportional)、積分(integral)、微分(derivative)”,是一種很常見的控制算法。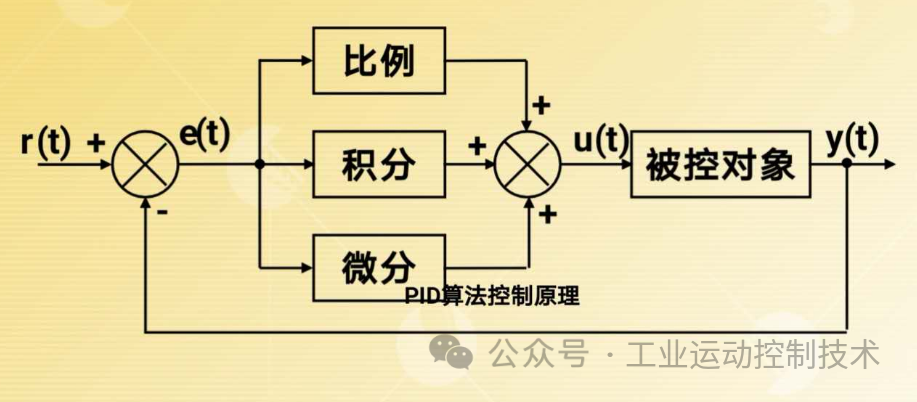
一、PID控制器
PID控制理念最早提出是在1932年,出生于瑞典后移民美國(guó)的物理學(xué)家哈利奈奎斯特(H Nyquist),在他的一篇論文當(dāng)中提出了采用圖形的方法來(lái)判斷系統(tǒng)的穩(wěn)定性。在他的基礎(chǔ)上,荷蘭裔科學(xué)家亨伯德(H W Bode)(對(duì)就你想的那個(gè)“伯德圖/波特圖”創(chuàng)始人)等人建立了一整套在頻域范圍設(shè)計(jì)反饋放大器的方法,后被用于自動(dòng)控制系統(tǒng)的分析和設(shè)計(jì),這也是PID算法最早從書面走向?qū)嵺`。
與此同時(shí),反饋控制原理開始應(yīng)用于工業(yè)過(guò)程中。1936年英國(guó)的考倫德(A Callender)和斯蒂文森(A Stevenson)等人給出了 PID控制器的方法,自此PID算法正式形成了,并且后來(lái)在自動(dòng)控制技術(shù)中占有非常重要的地位。
大家一定都見過(guò)PID的實(shí)際應(yīng)用。
比如四軸飛行器,再比如平衡小車......還有汽車的定速巡航、3D打印機(jī)上的溫度控制器....就是類似于這種:需要將某一個(gè)物理量“保持穩(wěn)定”的場(chǎng)合(比如維持平衡,穩(wěn)定溫度、轉(zhuǎn)速等),PID都會(huì)派上大用場(chǎng)。
二、PID控制器積分控制
控制器的輸出與輸入誤差信號(hào)的積分成正比關(guān)系。主要用于消除靜差,提高系統(tǒng)的無(wú)差度。積分作用的強(qiáng)弱取決于積分時(shí)間常數(shù)T,T越大,積分作用越弱,反之則越強(qiáng)。
為什么要引進(jìn)積分作用?
比例作用的輸出與誤差的大小成正比,誤差越大,輸出越大,誤差越小,輸出越小,誤差為零,輸出為零。
由于沒(méi)有誤差時(shí)輸出為零,因此比例調(diào)節(jié)不可能完全消除誤差,不可能使被控的PV值達(dá)到給定值。必須存在一個(gè)穩(wěn)定的誤差,以維持一個(gè)穩(wěn)定的輸出,才能使系統(tǒng)的PV值保持穩(wěn)定。這就是通常所說(shuō)的比例作用是有差調(diào)節(jié),是有靜差的,加強(qiáng)比例作用只能減少靜差,不能消除靜差。
為了消除靜差必須引入積分作用,積分作用可以消除靜差,以使被控的y(t)值最后與給定值一致。引進(jìn)積分作用的目的也就是為了消除靜差,使y(t)值達(dá)到給定值,并保持一致。 積分作用消除靜差的原理是,只要有誤差存在,就對(duì)誤差進(jìn)行積分,使輸出繼續(xù)增大或減小,一直到誤差為零,積分停止,輸出不再變化,系統(tǒng)的PV值保持穩(wěn)定,y(t)值等于u(t)值,達(dá)到無(wú)差調(diào)節(jié)的效果。
但由于實(shí)際系統(tǒng)是有慣性的,輸出變化后,y(t)值不會(huì)馬上變化,須等待一段時(shí)間才緩慢變化,因此積分的快慢必須與實(shí)際系統(tǒng)的慣性相匹配,慣性大、積分作用就應(yīng)該弱,積分時(shí)間I就應(yīng)該大些,反之而然。如果積分作用太強(qiáng),積分輸出變化過(guò)快,就會(huì)引起積分過(guò)頭的現(xiàn)象,產(chǎn)生積分超調(diào)和振蕩。通常I參數(shù)也是由大往小調(diào),即積分作用由小往大調(diào),觀察系統(tǒng)響應(yīng)以能達(dá)到快速消除誤差,達(dá)到給定值,又不引起振蕩為準(zhǔn)。
對(duì)一個(gè)自動(dòng)控制系統(tǒng),如果在進(jìn)入穩(wěn)態(tài)后存在穩(wěn)態(tài)誤差,則稱這個(gè)控制系統(tǒng)是有穩(wěn)態(tài)誤差的或簡(jiǎn)稱有差系統(tǒng)(System with Steady-state Error)。
為了消除穩(wěn)態(tài)誤差,在控制器中必須引入“積分項(xiàng)”。積分項(xiàng)對(duì)誤差取決于時(shí)間的積分,隨著時(shí)間的增加,積分項(xiàng)會(huì)增大。這樣,即便誤差很小,積分項(xiàng)也會(huì)隨著時(shí)間的增加而加大,它推動(dòng)控制器的輸出增大使穩(wěn)態(tài)誤差進(jìn)一步減小,直到等于零。
因此,比例+積分(PI)控制器,可以使系統(tǒng)在進(jìn)入穩(wěn)態(tài)后無(wú)穩(wěn)態(tài)誤差。PI控制器不但保持了積分控制器消除穩(wěn)態(tài)誤差的“記憶功能”,而且克服了單獨(dú)使用積分控制消除誤差時(shí)反應(yīng)不靈敏的缺點(diǎn)。
審核編輯:劉清
-
溫度控制器
+關(guān)注
關(guān)注
1文章
178瀏覽量
33872 -
控制算法
+關(guān)注
關(guān)注
4文章
166瀏覽量
21795 -
PID控制器
+關(guān)注
關(guān)注
2文章
173瀏覽量
18671
原文標(biāo)題:什么是PID控制器?PID控制器控制器中的積分控制是什么?
文章出處:【微信號(hào):旺材伺服與運(yùn)動(dòng)控制,微信公眾號(hào):旺材伺服與運(yùn)動(dòng)控制】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
經(jīng)典PID控制器的積分分離優(yōu)化算法

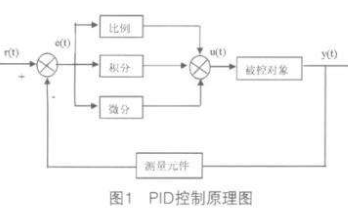
pid控制器原理

基于RX和RL78的PID控制器設(shè)計(jì)應(yīng)用

基于分?jǐn)?shù)階微積分的PID控制器方法
13個(gè)基于PID控制器的設(shè)計(jì)實(shí)例
pid控制器的輸入輸出_PID控制器的控制實(shí)現(xiàn)
PID控制器控制電壓的詳細(xì)介紹和PID控制器的C程序的概述
PID控制器的含義
什么是PID控制器?PID控制器控制器中的積分控制是什么?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論