 基于SPAD響應線性化的無直方圖激光雷達開發
基于SPAD響應線性化的無直方圖激光雷達開發
3D成像技術實現的空間感知在工業、汽車、航空航天和消費電子應用等領域不斷引起人們的關注。例如,自動駕駛汽車所需的自我感知水平要求具有高分辨率和高幀率的3D成像系統。遺憾的是,這些要求相互沖突,迫使工程師不得不進行性能限制的權衡。基于單光子雪崩二極管(SPAD)的激光雷達(LiDAR)/直接飛行時間(d-ToF)測量是主動探測方法中最有前景的技術之一。
在基于SPAD的d-ToF測量中,距離是通過測量從光源投射并由目標反射回探測器的光脈沖的行進時間來提取的,探測器由作為光子-邊緣轉換器的SPAD構成,與光子時間戳(timestamping)電路(通常是時間數字-轉換器(TDC)或時間-幅度轉換器(TAC))相耦合。由于硬件限制,例如探測器的死區時間(dead-time)和光子的統計性質,以及不相關背景光的存在,大量觀測值通常會被累積到直方圖內存中以提高信噪比,并通過信號處理技術提取目標距離。
據麥姆斯咨詢報道,近日,意大利布魯諾·凱斯勒基金會(FBK)和特倫托大學(University of Trento)的研究人員組成的研究團隊在IEEE Sensors Journal期刊上發表了題為“Histogram-less LiDAR through SPAD response linearization”的論文,提出了一種從基于SPAD的直接飛行時間(d-ToF)成像系統中獲取3D信息的新方法,該方法不需要構建時間戳直方圖,并且能夠承受高通量運行機制。所提出的采集方案模擬了SPAD探測器的行為,不會因死區時間而導致失真,并通過對光子時間戳進行簡單的平均運算來提取ToF信息,確保易于集成到專用傳感器中并可擴展至大型陣列。該方法通過全面的數學分析得到驗證,其預測結果與此問題的數值蒙特卡羅模型(Monte Carlo model)一致。最后,在具有挑戰性的背景條件下,研究人員展示了真實d-ToF測量設置中預測結果的有效性,遠遠超出了3.8 m距離內5%檢測率的典型堆積(pile-up)極限。
典型的d-ToF圖像采集需要一個脈沖激光器和一個具有光子時間戳功能的時間分辨單光子圖像傳感器。ToF通常是通過查找峰值或急劇上升沿(可能屬于反射激光脈沖)的位置從直方圖估算的。時間戳直方圖包含了正確估算飛行時間的所有相關信息,代表了基于SPAD的d-ToF系統領域的黃金標準處理技術。遺憾的是,直方圖在內存、帶寬和功耗方面需要大量資源,因為它需要從傳感器中讀取每個時間戳,以便由外部控制器(FPGA或微控制器)進行處理。即使使用片上(on-chip)直方圖的最新技術,所需的資源量仍然是相當大的。例如,一個具有100 ps時間分辨率和8位直方圖深度的10米范圍的128 × 128激光雷達系統大約需要10 MB內存。
如果不存在背景事件,并且忽略激激光脈沖的寬度,研究人員可以在不構建直方圖的情況下估算飛行時間。這可以通過簡單地計算僅包含激光時間戳的連續數據流的平均值來實現。為了將上述方法擴展到存在背景事件的情況,研究人員需要消除它們對平均值的貢獻。
研究人員分兩步實現無直方圖方案。首先,他們提出并評估了一種算法,基于簡單的即時平均操作從一組時間戳中有效地提取目標距離,無需分配直方圖內存。然后,由于所提出的算法基于探測器響應是線性的假設,因此他們提出了兩種可以在芯片上輕松實現的采集方案,并模擬沒有死區時間的單光子探測器的行為,從而對光子的輸入通量提供所需的線性響應。
為了實現所提出的提取方法,研究人員展示了新穎的模擬線性探測器行為的SPAD采集方案。更詳細地說,他們展示了兩種從真實SPAD獲得線性化SPAD響應的方法:“采集或丟棄(acquire or discard)”;時間門控(Time-gated)。這兩種方法都基于這樣的假設:基礎統計過程是平穩且遍歷的。
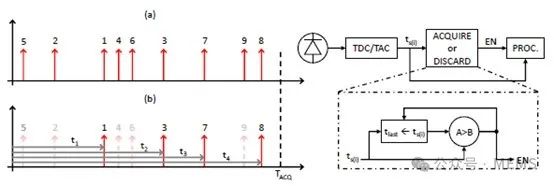
圖1 采用“acquire or discard”采集方法的SPAD響應線性化示例
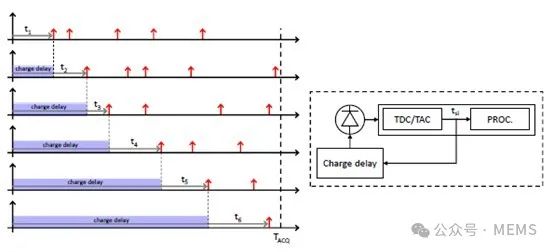
圖2 采用時間門控采集方法的SPAD響應線性化示例
研究人員將所提出的無直方圖采集方法與最先進的基于SPAD的激光雷達傳感器在內存要求、可擴展性和高背景光通量的耐受性方面進行了比較。
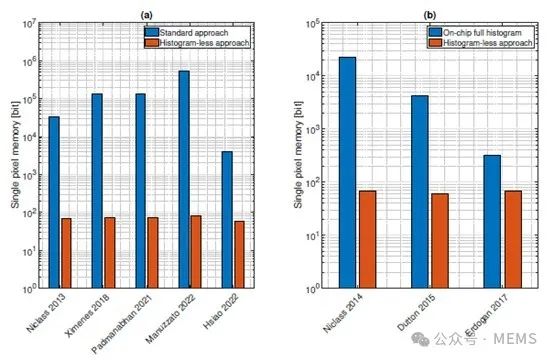
圖3 無直方圖采集方法與基于直方圖的d-ToF傳感器所需的每像素內存量的比較
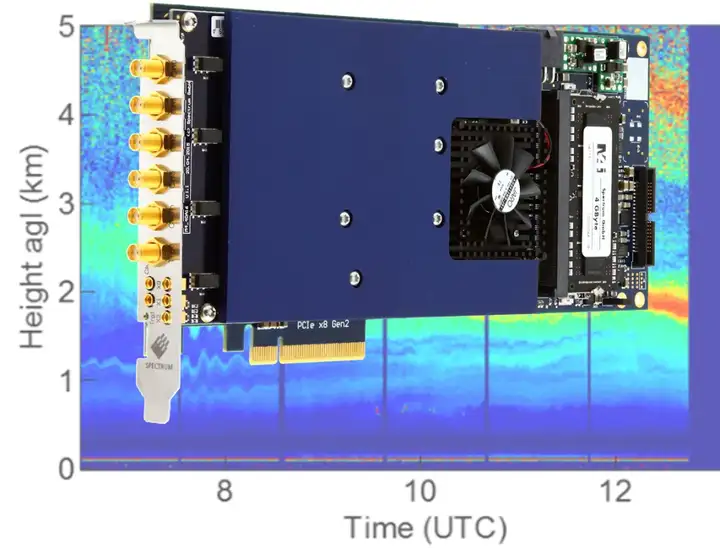
所提出的采集方案已通過使用現有基于SPAD的單點d-ToF傳感器(其架構與Perenzoni等人的架構類似,此外還提供了片上直方圖功能)的真實數據進行測量和驗證。該傳感器采用Xu等人開發的SPAD技術,并采用標準150 nm CMOS工藝制造。背景事件是通過直接指向傳感器的約180 W光纖耦合鹵素照明器產生的,具有約10%反射率的黑色啞光面板被選擇作為目標,距離范圍為1 m至3.8 m。圖4顯示了實驗設置,并在其中標明了主要組件。首先,研究人員通過僅考慮背景光來重點驗證所提出的采集方案的線性化行為。然后,他們考慮將背景和激光結合在一起,就像在真實場景中一樣,并使用所提出的無直方圖采集方案來計算ToF。測量結果表明,所提出的采集和提取方案無需時間戳直方圖就能成功計算ToF。
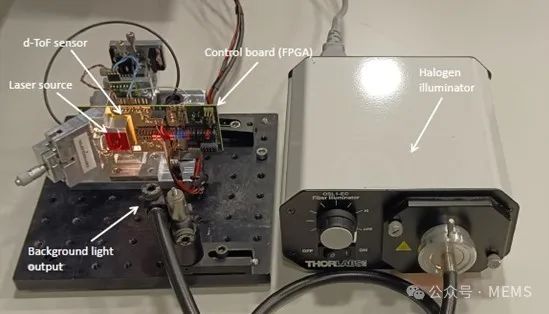
圖4 實驗設置
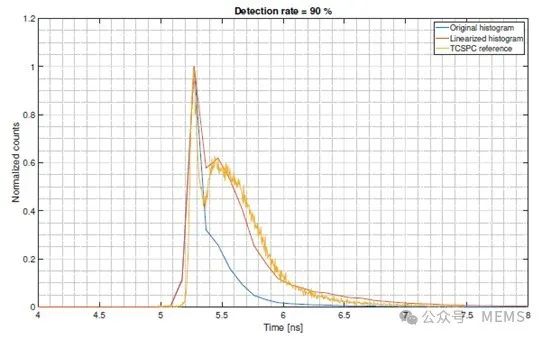
圖5 所提出的SPAD線性化方法在強堆積條件下的行為表征
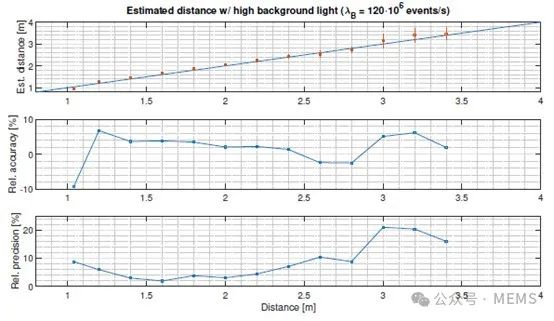
圖6 高背景光通量情況下的測量結果
綜上所述,這項研究工作展示了如何在基于SPAD的d-ToF系統中提取飛行時間信息,而無需構建占用資源和帶寬的時間戳直方圖。此外,所提出的方法能夠承受高光子通量,并且能夠承受比傳統公認的5%的極限高三個數量級的檢測率。該采集方法基于SPAD響應的線性化,適用于使用低資源的CMOS技術集成,由于它可以輕松地按像素集成,因此可擴展到大型陣列。所提出的提取方法已經通過蒙特卡羅數值模擬進行了完全表征。該方法在數學上也得到了證明,研究人員通過重新配置現有的d-ToF傳感器并使用真實數據提取ToF的實際測量證明了其有效性。所提出的提取方法可以至少以兩種方式實現,即通過“acquire or discard”或時間門控檢測方案。雖然“acquire or discard”方案允許使用最少的資源,但它存在積分時間較長的問題,尤其是當光子通量過高時。另一方面,時間門控方案可以保證更有效的采集,但要以每像素的可控延遲元件為代價。混合方案采用了粗略但簡單的延遲元件來實現時間門控采集,并在剩余時間量上依賴于“acquire or discard”方案,可以同時保證緊湊的硬件實現和優化的采集時間。研究人員通過使用極少量的資源(僅需要兩個計數器和一個累加器)證明了所提出的ToF提取方法的有效性。
論文信息:DOI: 10.1109/JSEN.2023.3342609
審核編輯:劉清
-
轉換器
+關注
關注
27文章
8745瀏覽量
148054 -
探測器
+關注
關注
14文章
2653瀏覽量
73252 -
激光雷達
+關注
關注
968文章
4027瀏覽量
190418 -
3D成像技術
+關注
關注
0文章
11瀏覽量
4502
原文標題:基于SPAD響應線性化的無直方圖激光雷達
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

一則消息引爆激光雷達行業!特斯拉竟然在自研激光雷達?
全場景適用!TS Spectrum高速數字化儀在激光雷達系統中的應用
激光雷達會傷害眼睛嗎?

激光雷達的維護與故障排查技巧
激光雷達技術的基于深度學習的進步
光學雷達和激光雷達的區別是什么
一文看懂激光雷達

基于FPGA的激光雷達控制板

全固態激光雷達SPAD芯片量產落地!阜時科技芯片上車應用
硅基片上激光雷達技術綜述

硅基片上激光雷達的測距原理

激光雷達的探測技術介紹 機載激光雷達發展歷程

亮道智能:發布全新一代激光雷達,未來主攻固態激光雷達低價市場
激光雷達LIDAR基本工作原理






 工商網監
工商網監
評論