 基于無人機遙感技術的漁業養殖池塘水質監測方法
基于無人機遙感技術的漁業養殖池塘水質監測方法
一、引言
近年來我國注重發展養殖產業,尤其是漁業養殖產業,其不僅是我國國民經濟重要的組成部分,也為民眾提供品類豐富的魚類、蝦類、蟹類等,其與人民生活息息相關。我國幅員遼闊,淡水資源豐富,為漁業養殖帶來了得天獨厚的條件。伴隨著相關部門政策支持,漁業養殖業極為發達。但在漁業養殖過程中,對池塘水質要求極高。漁業養殖池塘均為“活水”,極易受到上游河水污染,同時當水質內某種微生物或物質超標后,影響水產養殖動物正常生長,嚴重可造成水產養殖動物大量死亡,因此對漁業養殖池塘水質進行監測非常有必要。近年來,有不少專家學者研究漁業養殖池塘水質監測方法。
無人機遙感技術是通過無人機搭載遙感影像采集設備,執行遙感影像拍攝后,通過遙感影像獲取目標相關信息的技術。該技術被廣泛應用指揮救援、地質調查、環境監測等領域。本文在此將無人機遙感技術應用到池塘水質監測過程中,提出基于無人機遙感技術的漁業養殖池塘水質監測方法,以提升漁業養殖池塘水質監測技術水平。
無人機遙感技不是通過無人機搭載遙感影像采集設備,執,行遙感影像拍攝 后,通過遙感影像獲取目標相關信息的技術。該技術被廣泛應用指揮救援、地質調查、環境監測等領域。本文在此將無人機遙感技術應用到池塘水質監測過程中,提出基于無人機謠感技術的漁業養殖池塘水質監測方法,以提升漁業養殖池塘水質監測技術水平。
二、研究區概況
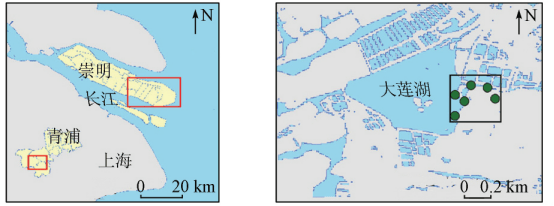
以某水產養殖公司的半循環養殖池塘作為實驗對象,該半循環養殖池塘占地面積約為200X104m2,其中蟹塘為53X104m2左右,淡水魚塘為140X104m2左右,凈化區面積為7X104m2左右。該半循環養殖池塘存在多條交匯河流,且河流上游存在工業區和生活區,會存在生活廢水排放問題和工業污染殘留。該半循環養殖池塘水質監測點位置如圖1所示,
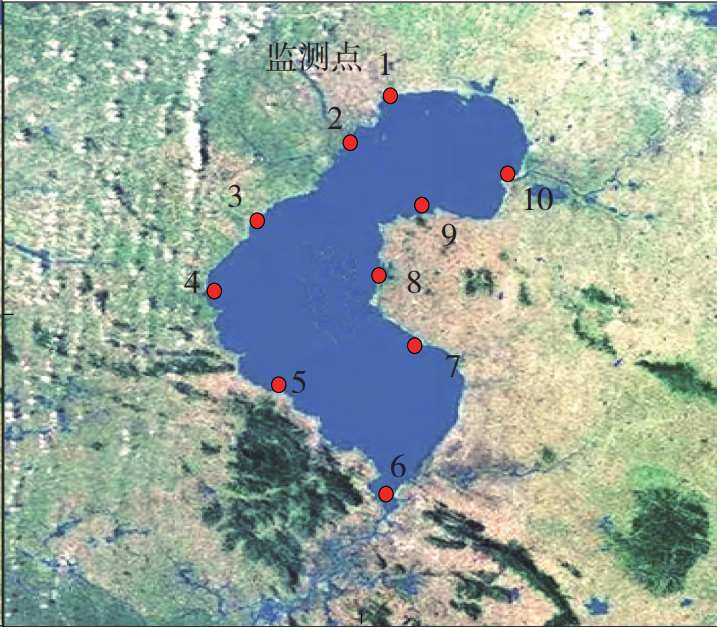
圖1 研究區水質監測點位置示意圖
在圖1內10個水質監測點位置,采集表層0.3m處水樣,容量為800mL,分別使用堿性過硫酸鉀分光光度法、鉗酸分光光度法、納氏試劑法、高錳酸鹽指數法和重量法測試池塘水樣內的總氮(TN)、總磷(TP)、銨態氮(NH4+-N)高酸鹽指數(CODMn)和總懸浮物(TSS)。
三、漁業養殖池塘水質監測方法
3.1基于無人機的池塘水質監測圖像采集
使用無人機搭載高光譜成像儀和地物高光譜儀方式采集研究區內池塘遙感圖像。利用無人機搭載高光譜成像儀和地物光譜儀拍攝到研究區池塘遙感圖像后,將其回傳到地面計算機內備用。
3.2池塘遙感圖像輻射校正
在計算機內,將采集到的池塘遙感圖像按照該圖像的量級對其進行量化處理,得到物理意義上的量輻射率,其詳細過程如下:
令DN表示池塘遙感圖像的像元亮度值,高光譜輻射率由L表示二者之間存在較強的線性關系。則第i個輻射波段池塘遙感圖像的輻射率表達公式如下:

式中:Qi表示第i個輻射波段池塘遙感圖像的輻射率;Zi,Bi分別表示第個輻射波段的增益數值和偏置系數.
由于無人機拍攝池塘遙感圖像時,受太陽位置、拍攝角度以及大氣透明度影響,導致池塘遙感圖像存在失真情況。利用公式(1)得到所有池塘高光譜圖像輻射率后,依據該輻射率計算無人機拍攝池塘遙感圖像時接收到的輻射值,該輻射值由Qsat。表示則地表反射率和無人機拍攝遙感圖像時接收的輻射之間關系表達公式如下:

式中:p表示池塘表面反射率;Qsat表示地物高光譜儀的輻射值;Qpath表示輻射路徑;T表示池塘和無人機之間的大氣透射率;E分別表示太陽輻射照度和太陽天頂角:Tz表示太陽照射方向的大氣透射率;Edown表示地表下行散射照度。
表1太陽輻射照度取值
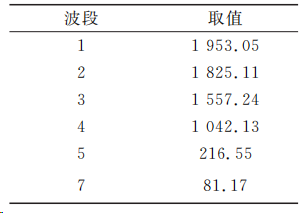
其中太陽輻射照度取值如表1所示,在表1內,由于6波段為熱反射波段,本文不考慮池塘區域熱反射情況,因此無6波段。
在忽略大氣透射損失和地表下行散射情況下,則公式(2)可改寫為:

當池塘遙感圖像內黑目標的實際反射數值為0時,則無人機拍攝池塘遙感圖像時,接收到的輻射值計算公式如下:

式中:Z表示總偏置數值;B表示遙感圖像總偏置系數;DNmin表示池塘遙感圖像的像元亮度最小值;Qmin表示輻射率最小值。
四、實驗分析
使用本文方法采集研究區遙感圖像,并采集水樣并檢測后,使用基于水質反演模型實現池塘水質監測。
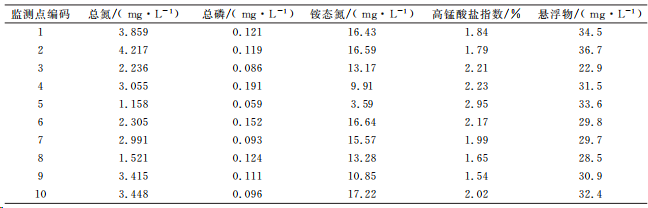
在該過程中,檢測的池塘內總磷、總氮、按態氮、高錳酸鹽指數和懸浮物水質參數,如表2所示。
表2池塘10個監測點水質參數
池塘內總磷數值作為實驗對象,利用其驗證本文方法構建的水質反演模型輸出監測結果的精度,結果如圖2所示。
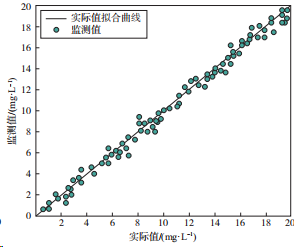
圖2水質反演模型檢驗結果
分析圖3可知,利用本文方法輸出的池塘內總磷監測結果的監測值與實際值擬合曲線較為接近說明其可較好地反演池塘內總磷實際分布狀況。
以編碼為1~5的監測點為實驗對象,使用本文方法采集該池塘遙感圖像后,計算該5個監測點遙感光譜反射率,結果如圖3所示。
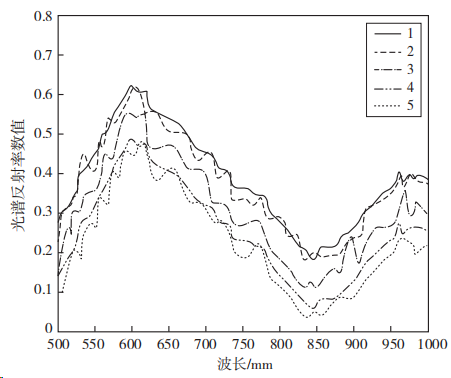
圖3 5個監測點遙感光譜反射率曲線
分析圖3可知,該池塘5個監測點遙感光譜反射率隨著波長的增加呈現先上升后下降趨勢。該池塘5個監測點的光譜反射率在500~600nm呈現一個反射高峰,其原因在于池塘水質內存在大量的葉綠素和胡蘿卜素,其吸收500~600mm波段的光譜較少,且水質內存在的懸浮物會將一部分光譜反射,因此在該波段內,池塘監測點的光譜反射率呈現峰狀分布,隨著波長持續增加,在波長為600~850mm左右時,池塘監測點光譜反射率呈現稍大幅度下降趨勢。出現該現象原因為池塘水質內葉綠素和胡蘿卜素可吸收該波段光譜。因此在600~850mm波段內,光譜反射率數值呈現降低趨勢在波段為850~1000mm時該池塘光譜反射率數值又呈現上升趨勢,其原因也是因為水質內葉綠素和胡蘿卜素不吸收該波段光譜所致,綜上所述,在該池塘內。5個監測點的光譜反射率曲線變化趨勢相同,但受監測位置不同,在相同波長時,其光譜反射率數值存在一定差異,但相差數值不大,
使用本文方法監測該池塘10個監測點的總氮、總磷、懸浮物、高酸鹽指數和態氮分布情況,結果如圖4所示。
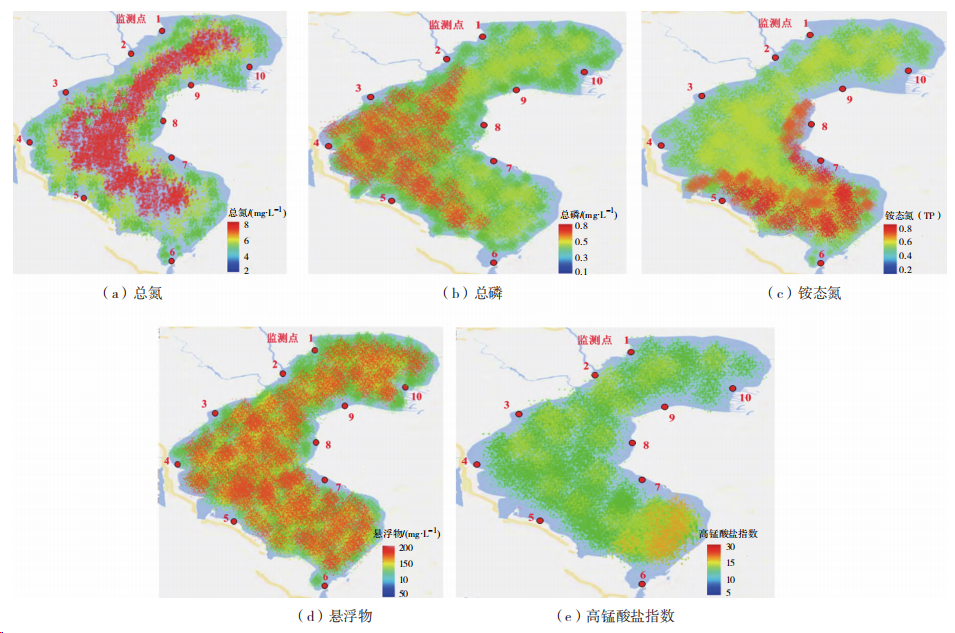
圖4 池塘水質監測結果
分析圖4可知,該池塘內總氮主要分布在池塘的內部區域,越靠近岸邊,總氮含量越低,且10個監測點水質內總氮數值相差不大。該池塘內,總磷主要分布在2,3,4,5,監測點附近,其他監測點區域總磷含量較少態氮主要分布在第5~8監測點區域,其他區域態氮數值不高。該池塘的懸浮物數值略高,且其分布較為均勻,10個監測點位置處的懸浮物數值均相差不大。該池塘懸浮物較高的原因在于水質內含有水生動物所吃的食物。該池塘內高錳酸鹽指數較低,高數值僅分布在第6和第7監測點區域綜上結果:本文方法可有效依據池塘水質檢測結果,反演其內部總磷、總氮等物質分布情況,具備較強的應用效果。
表3 12個月內池塘銨態氮和 高錳酸鹽指數變化
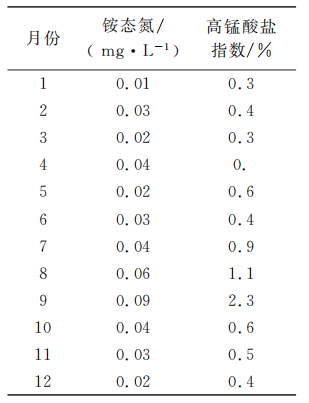
進一步驗證本文方法實際應用效果,以12個月為期,監測點1為實驗對象,以鍍態氮和高錳酸鹽指數為指標,測試在12個月內,本文方法監測該池塘鍍態氮和高錳酸鹽指數變化情況,結果如表4所示,分析表3可知,在12個月內該池塘態氮和高酸鹽指數在8月份之前時,二者數值呈現平穩狀態;但當時間在8月和9月時,該池塘水質內錢態氮和高錳酸鹽指數迅速上升。隨著時間持續延長,該池塘水質內態氮和高錳酸鹽指數又恢復到略平穩狀態。出現該情況原因在于在8~9月份時,晝夜溫差較大,使池塘內藻類浮游生物大量死亡,池塘內的懸浮物增加,有機質含量也上升,同時該季節是魚類、蝦類、蟹類豐收時間,池塘內生物被打撈后,池塘水質內存在飼料殘留,因此造成按態氮和高錳酸鹽指數上升。
五、結論
本文提出基于無人機遙感技術的漁業養殖池塘水質監測方法,豐富了水質監測手段,為漁業養殖池塘水環境保護提供了新思路。通過對本文方法進行多角度驗證,本方法具備較強的實用性。從驗證結果來看,本文方法在監測池塘水質方面取得一定成果,但其依然存在很大進步空間,未來可從采集遙感圖像方面和水質反演模型適用性方面進行改進。在方法中增加遙感圖像預處理方法,去除遙感圖像內的噪聲,充分考慮水質反演模型參數選擇問題,使其水質反演結果更加精準。
推薦:
便攜式高光譜成像系統 iSpecHyper-VS1000
專門用于公安刑偵、物證鑒定、醫學醫療、精準農業、礦物地質勘探等領域的最新產品,主要優勢具有體積小、幀率高、高光譜分辨率高、高像質等性價比特點采用了透射光柵內推掃原理高光譜成像,系統集成高性能數據采集與分析處理系統,高速USB3.0接口傳輸,全靶面高成像質量光學設計,物鏡接口為標準C-Mount,可根據用戶需求更換物鏡。
審核編輯 黃宇
-
遙感
+關注
關注
0文章
248瀏覽量
16888 -
無人機
+關注
關注
230文章
10515瀏覽量
182407 -
水質監測
+關注
關注
0文章
292瀏覽量
10258
發布評論請先 登錄
相關推薦
水產養殖在線監測系統
水產養殖水質監測系統有什么特點
4G與lora DTU農業監測應用數字化管理升級

基于無人機高光譜影像的水稻分蘗數監測方法研究

智慧漁業水質監測的重要作用
基于無人機高光譜遙感的河湖水環境探測
漁業養殖在線監控系統
凱米斯科技水質監測,守護水產養殖健康新標桿

基于無人機遙感的作物長勢監測研究進展

基于無人機高光譜遙感的荒漠化草原地物分類研究1.0
無人機遙感技術在農業病蟲害監測中的應用研究






 工商網監
工商網監
評論