") 基于鴻道(Intewell?)操作系統(tǒng)研發(fā)的農(nóng)業(yè)機器人操作系統(tǒng)
基于鴻道(Intewell?)操作系統(tǒng)研發(fā)的農(nóng)業(yè)機器人操作系統(tǒng)
推動農(nóng)業(yè)科技發(fā)展、強化農(nóng)機裝備自主研制和高端智能農(nóng)機裝備研發(fā)制造既是黨和政府關(guān)注的重點,也是實現(xiàn)鄉(xiāng)村全面振興、加快建設(shè)農(nóng)業(yè)強國的內(nèi)在要求和迫切需要。
江蘇大學(xué)與科東軟件聯(lián)合研發(fā)“農(nóng)業(yè)機器人操作系統(tǒng)”,并成立“農(nóng)業(yè)機器人操作系統(tǒng)”聯(lián)合實驗室,奮力推進(jìn)我國農(nóng)業(yè)智能化,推動農(nóng)業(yè)科技創(chuàng)新。“農(nóng)業(yè)機器人操作系統(tǒng)”的技術(shù)革新,對提高農(nóng)業(yè)生產(chǎn)效率、保護(hù)環(huán)境、應(yīng)對農(nóng)業(yè)勞動力短缺及促進(jìn)智慧農(nóng)業(yè)發(fā)展等方面都有著重要的戰(zhàn)略意義。
農(nóng)業(yè)機器人操作系統(tǒng)
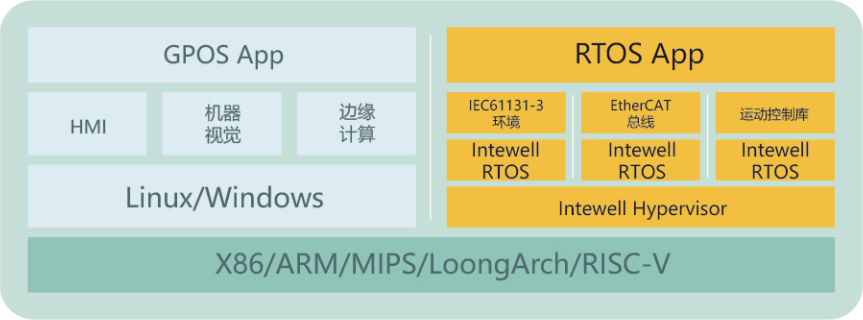
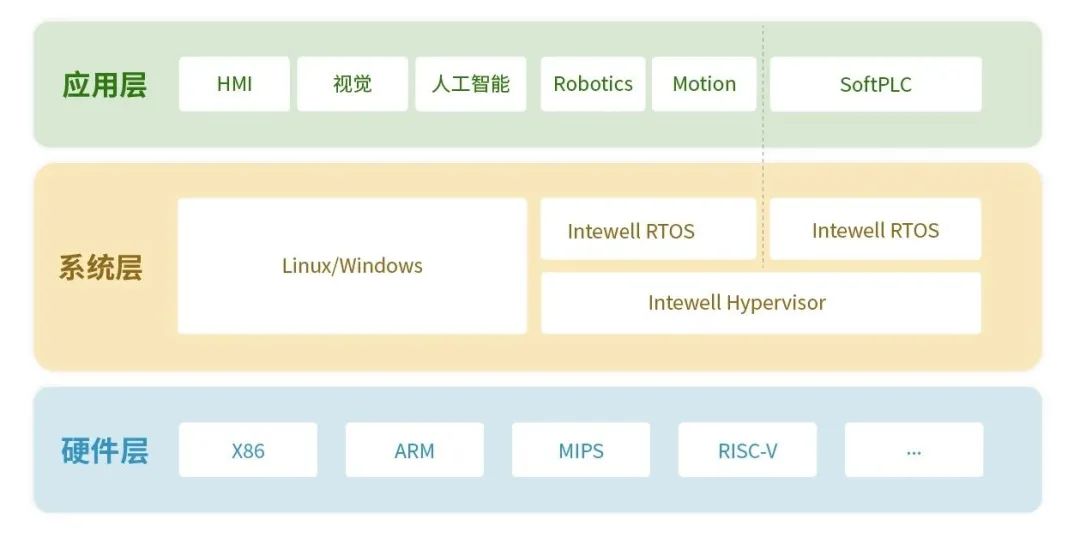
農(nóng)業(yè)機器人控制操作系統(tǒng)是一個復(fù)雜的集成系統(tǒng),涉及多個關(guān)鍵技術(shù)和組件,旨在實現(xiàn)農(nóng)業(yè)生產(chǎn)的自動化和智能化。
核心亮點
自主可控:
基于鴻道(Intewel?)操作系統(tǒng)研發(fā)的農(nóng)業(yè)機器人操作系統(tǒng),真正實現(xiàn)自主可控,避免卡脖子問題,同時具備高安全性和穩(wěn)走性。
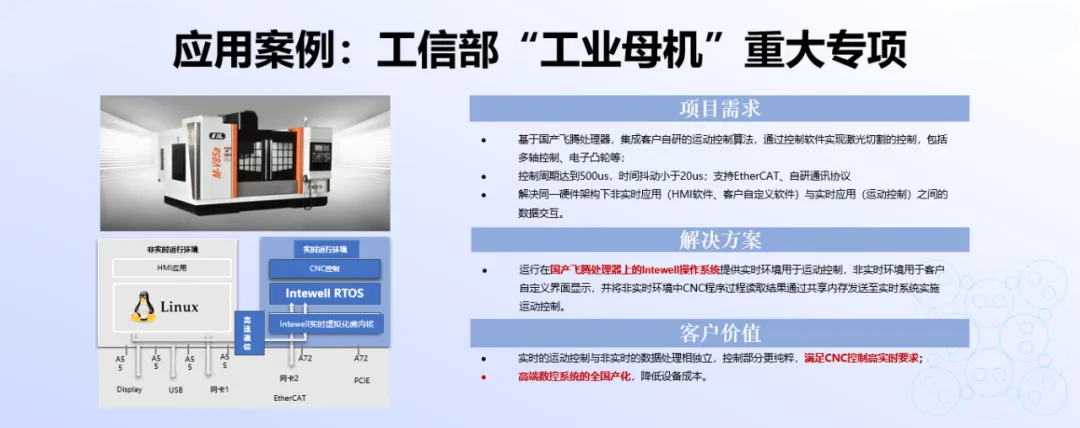
運動控制技術(shù):
農(nóng)業(yè)機器人的運動控制是實現(xiàn)其自主運動和執(zhí)行任務(wù)的關(guān)鍵。通過精確的運動控制,機器人可以準(zhǔn)確地到達(dá)指定位置并執(zhí)行相應(yīng)的農(nóng)業(yè)操作。
決策與控制算法:
基于感知到的環(huán)境信息和預(yù)設(shè)的任務(wù)要求,農(nóng)業(yè)機器人需要利用決策與控制算法來自主規(guī)劃行動路徑和執(zhí)行操作。這些算法涉及機器學(xué)習(xí)、人工智能等技術(shù),以提高機器人的決策能力和作業(yè)效率。
人機交互界面:
為了方便用戶對農(nóng)業(yè)機器人進(jìn)行監(jiān)控和管理,我們可以通過人機交互界面,查看機器人的實時狀態(tài)、作業(yè)進(jìn)度等信息,并可以對機器人進(jìn)行遠(yuǎn)程控制和調(diào)整。
感知技術(shù):
農(nóng)業(yè)機器人通過各種傳感器獲取農(nóng)田環(huán)境信息,如土壤濕度、溫度、光照強度以及作物生長狀況等。這些傳感器安裝在機器人的不同部位,通過采集環(huán)境信息并利用算法進(jìn)行分析和處理,使機器人能夠更好地適應(yīng)不同的農(nóng)業(yè)環(huán)境。
審核編輯 黃宇
-
機器人
+關(guān)注
關(guān)注
211文章
28640瀏覽量
208395 -
操作系統(tǒng)
+關(guān)注
關(guān)注
37文章
6892瀏覽量
123739
發(fā)布評論請先 登錄
相關(guān)推薦
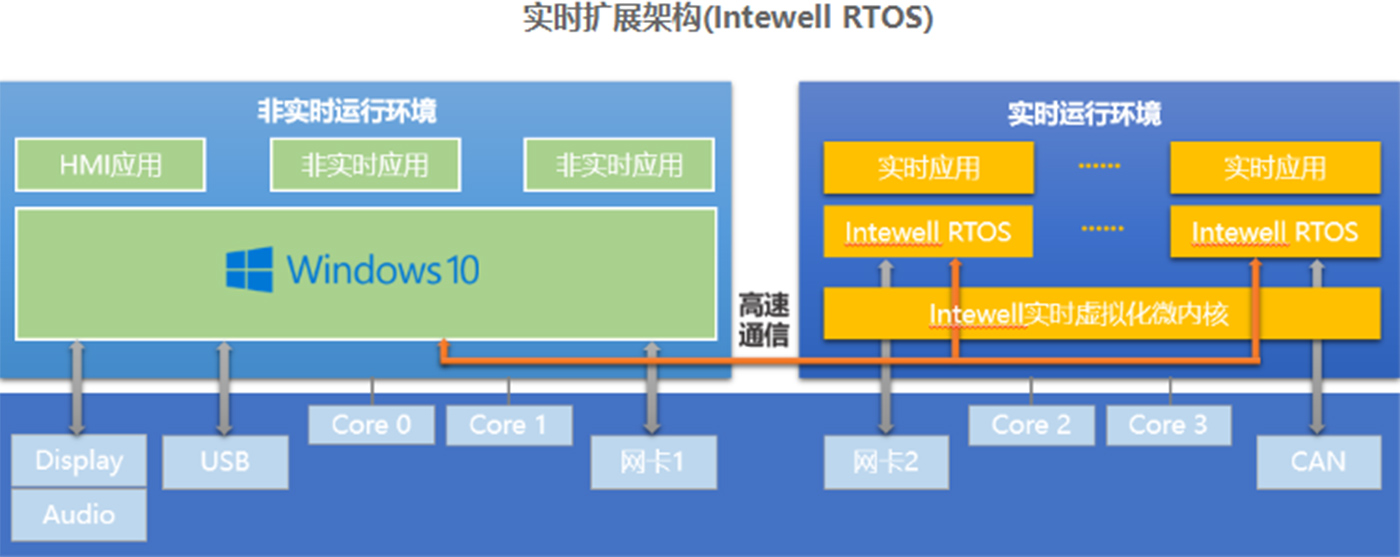
鴻道Intewell操作系統(tǒng)的Windows實時拓展方案
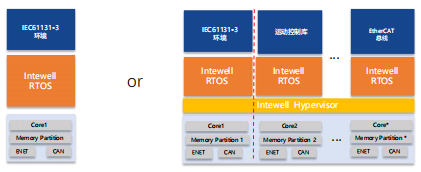
鴻道Intewell-C純實時構(gòu)型,適合有功能安全認(rèn)證需求的工業(yè)操作系統(tǒng)
鴻道Intewell操作系統(tǒng):引領(lǐng)工業(yè)創(chuàng)新的軟硬件方案

低空經(jīng)濟(jì)的第一助推力,基于鴻道Intewell操作系統(tǒng)的無人機控制系統(tǒng)
鴻道(Intewell)操作系統(tǒng)應(yīng)用于工業(yè)機器人項目案例分享
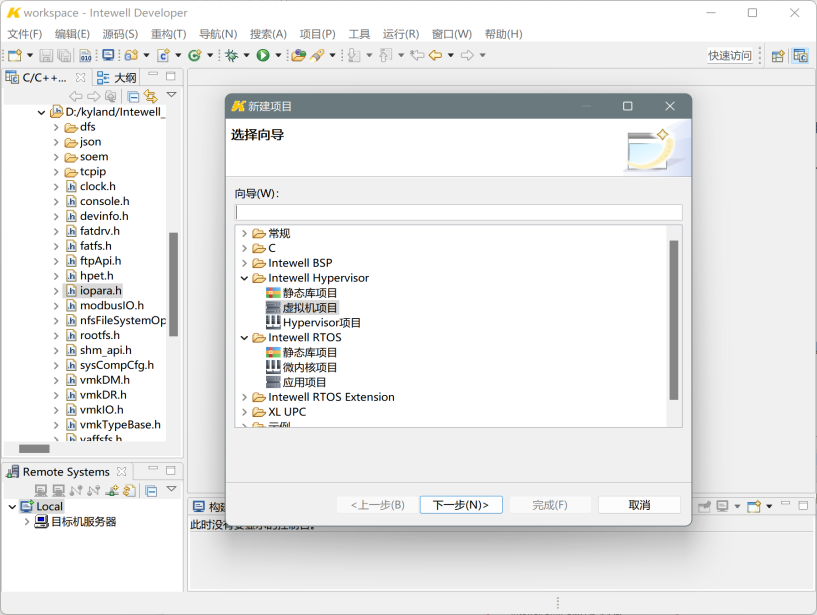
實時操作系統(tǒng)開發(fā)工具:鴻道Intewell Developer介紹
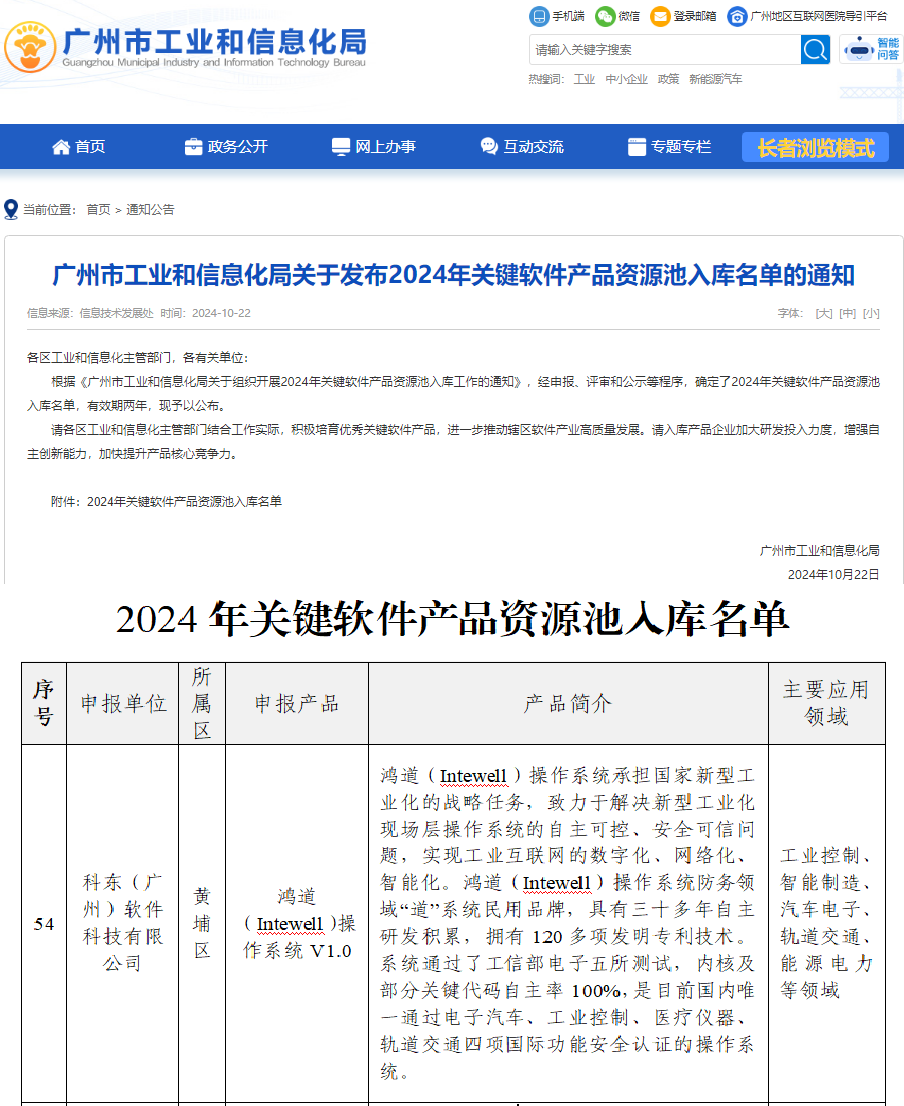
實力認(rèn)證:鴻道(Intewell)操作系統(tǒng)入庫2024年廣州市工信局關(guān)鍵軟件產(chǎn)品資源池
國產(chǎn)力量崛起!鴻道Intewell操作系統(tǒng)推動我國制造業(yè)不斷升級
基于鴻道Intewell操作系統(tǒng)的運動控制系統(tǒng)方案
鴻道Intewell操作系統(tǒng)X86生態(tài)之:Intel J1900
嵌入式實時操作系統(tǒng):Intewell操作系統(tǒng)與VxWorks操作系統(tǒng)有啥區(qū)別

工業(yè)實時操作系統(tǒng)對比:鴻道Intewell跟rt-linux有啥區(qū)別

ARM架構(gòu):鴻道Intewell操作系統(tǒng)芯生態(tài)之·瑞芯微RK3399
高實時、高可靠的微內(nèi)核操作系統(tǒng)——鴻道Intewell
工業(yè)控制:鴻道(Intewell)操作系統(tǒng)工業(yè)機器人控制解決方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論