 康謀分享 | aiSim5仿真場景重建感知置信度評估(三)
康謀分享 | aiSim5仿真場景重建感知置信度評估(三)
?aiSim5重建高精度的真實交通場景,用于測試和訓練ADAS/AD系統。內置場景包括賽道、車庫、高速公路和城市環境。通過全局行動日志,aiSim能將駕駛數據轉化為場景重建。車道線檢測算法在仿真與現實世界的相關性測試中誤差相近,召回率均接近98.5%。多目標檢測算法在仿真中的召回率為64.68%,與真實世界的68.8%相近。
一、具體應用
仿真場景重建,即在aiSim中重新模擬由裝備了傳感器的實際數采車輛記錄的交通情況,重建原始交通狀態、對象和事件,并能夠自由的進行調整,可應用于:
1、重建現實世界的交通問題
在aiSim中重建現實世界的交通問題并快速迭代出可能的解決方案,比如模擬特定交叉路口交通情況,測試新的路口通過策略。
2、生成合成感知數據
生成具有代表性和通用性的合成感知數據,用于訓練和驗證ADAS/AD系統或其他的相關的NN模型,從而覆蓋不同的交通狀態和環境。
3、更改測試參數
更改測試參數并將場景轉換為閉環測試,用于評估ADAS/AD系統在不同環境下的性能,比如不同天氣狀態,不同交通密度等,通過閉環測試,可以確保系統在各種預期和非預期的情況下正常工作。
二、內置場景
在aiSim中提供了多種高精內置場景:
1、賽道場景ZalaZone
ZalaZone是位于匈牙利的一個真實世界的測試賽道,在aiSim中,它是基于激光掃描、全景照片(360°)參考以及提供的參考3D模型(交通標志等)進行建模的。

2、車庫場景
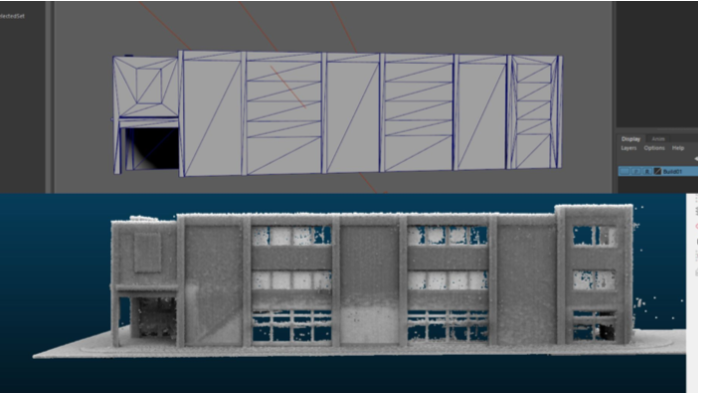
aiSim中停車場地圖是根據平面圖、現場測量和照片參考資料進行建模的。幾何結構基于激光掃描和平面圖數據構建。通過將真實世界的測量數據與仿真中的測量數據進行比較,可以驗證aiSim中的人工照明部分。


3、 高速公路場景
aiSim的高速公路地圖大多是基于HD地圖生成,并由3D建模工程師進行場景重建:
- 道路網格生成:道路網格是基于HD地圖數據生成。
- 道路標線:道路標線也是來源于高清地圖,并且精確度可以達到5-10厘米。
- 地形生成:地形是基于可用的高程數據構建的。
- 植被/景觀添加:在地形的某些部分,根據圖像添加植被和景觀,這一步驟使用了aiSim中現有的植被資產庫。
4、城市場景
Budapest_Urban是一個基于HD地圖生成的城市場景,它代表了匈牙利首都布達佩斯的城市環境(1.8KM)。此場景中的建筑物是通過攝影測量學(photogrammetry)技術重建的,利用大量記錄的圖像來創建三維模型。建筑物模型的最大誤差為50厘米。
三、全局行動日志
除了通過手動重建交通流以外,aiSim提供一種新的場景重建形式,即全局行動日志。
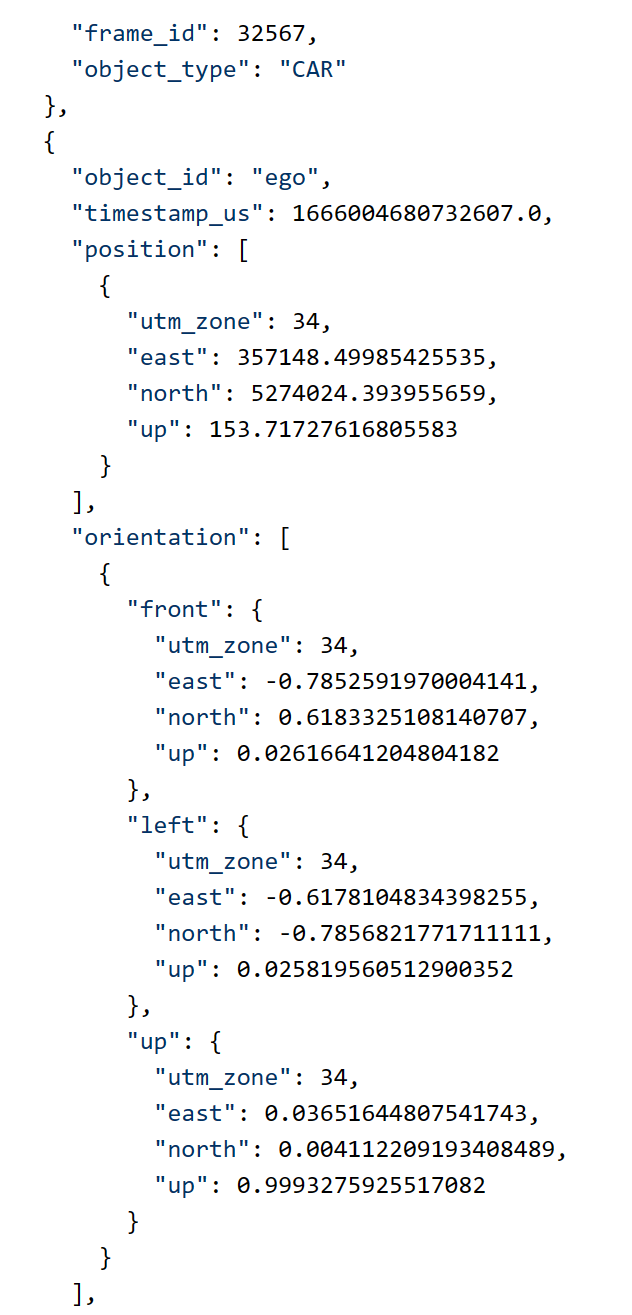
全局行動日志是包含了重建場景對象和其屬性的JSON文件。每一條目都包含了對象的相關尺寸,位置等信息,aiSim將會將整個文件中的駕駛數據轉化為重建場景。
四、置信度驗證
在aiSim的仿真重建場景和真實場景中分別測試了車道線檢測和多目標檢測算法,以驗證重建場景的置信度水平:
1、車道線檢測算法相關性
在aiSim中重建M0匈牙利高速公路的數字孿生場景,并模擬與之相匹配的氣候條件,驗證車道檢測算法在虛擬仿真與現實世界中的相關性。
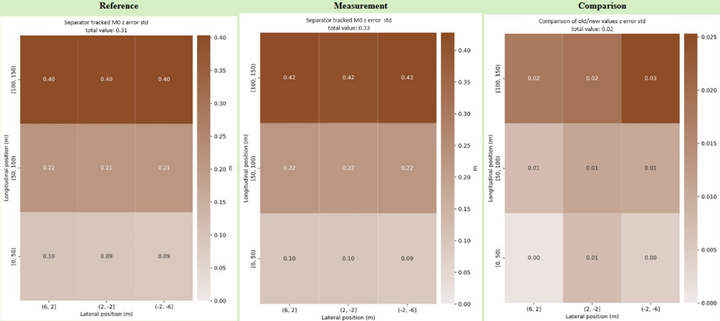
從結果上可以可以看出檢測算法在垂直方向上的測量誤差的標準差(z erro std):
- 真實世界場景測試0.31
- aiSim仿真場景測試0.33
誤差值主要分布在縱向遠距離[100,150]米的范圍內。
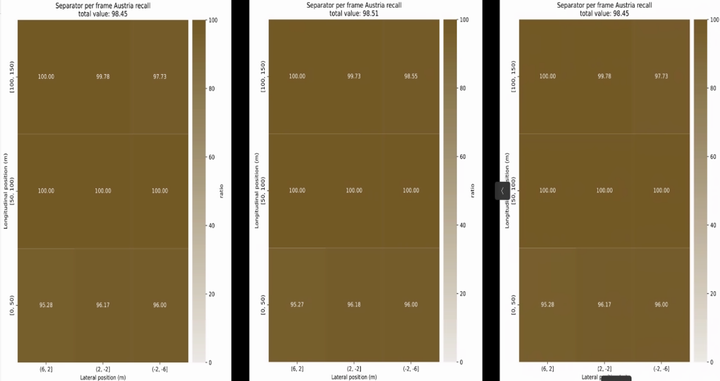
召回率(Recall)指標:
- 真實世界召回率98.45
- aiSim4召回率98.51
- aiSim5 召回率98.45
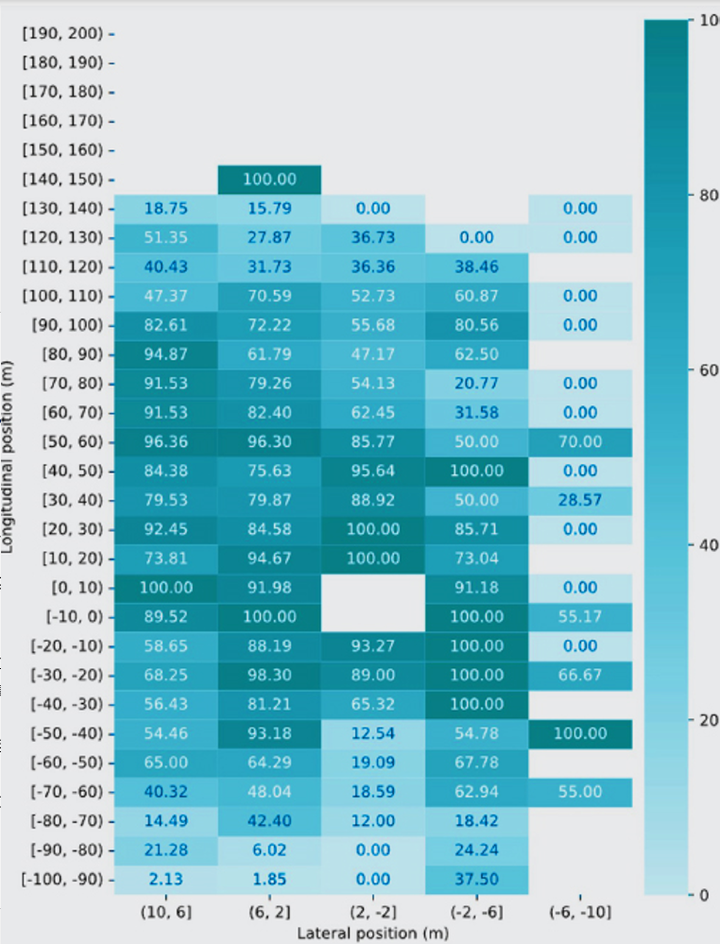
2、 多目標檢測算法相關性分析
檢測對象:Ego周圍的車輛
傳感器配置:5×Camera+2×Radar
召回率指標能:
- 在真實世界的數據中,召回率為68.8%
- 在aiSim5仿真世界中,召回率為64.68%
召回率隨著距離Ego遠近變化而變化。在接近Ego的區域(例如0到30米),召回率較高,而在較遠的區域(例如100米以上),召回率有所下降。
以上就是aiSim5仿真場景重建感知置信度評估的全部內容。
作者介紹???????
崔工
康謀科技仿真測試業務技術主管,擁有超過5年的汽車仿真測試及自動駕駛技術研發經驗,熟練掌握仿真測試工具和平臺,如aiSim、HEEX等,能有效評估和優化自動駕駛系統的性能和安全性。擁有出色的跨文化溝通能力,成功帶領團隊完成多項海外技術合作項目,加速了公司在自動駕駛技術上的國際化進程。作為技術團隊的核心,領導并實施過大規模的自動駕駛仿真測試項目,對于車輛行為建模、環境模擬以及故障診斷具有獨到見解。擅長運用大數據分析和人工智能技術,優化仿真測試流程,提高測試效率和結果的準確性。
-
測試
+關注
關注
8文章
5377瀏覽量
127064 -
adas
+關注
關注
309文章
2193瀏覽量
208858 -
自動駕駛
+關注
關注
785文章
13931瀏覽量
167008
發布評論請先 登錄
相關推薦
康謀與Anyverse建立合作伙伴關系
康謀技術 | 毫米波雷達技術解析

康謀分享 | 直面AD/ADAS快速開發挑戰:IVEX自動駕駛場景管理及分析平臺!

康謀分享 | 汽車仿真與AI的結合應用

康謀分享 | 在基于場景的AD/ADAS驗證過程中,識別挑戰性場景!

神經重建在自動駕駛模擬中的應用

自動駕駛聯合仿真——功能模型接口FMI(終)

車輛動力學仿真模型的可信度評估方法

基于大模型的仿真系統研究一——三維重建大模型

康謀新聞 | 康謀與IVEX正式建立合作伙伴關系

康謀分享 | 自動駕駛聯合仿真——功能模型接口FMI(三)

康謀分享|aiSim5基于生成式AI擴大仿真測試范圍(終)

康謀產品 | 車載以太網:智能汽車通信的加速器

康謀分享|aiSim5激光雷達LiDAR模型驗證方法(二)

康謀分享 | aiSim5 物理相機傳感器模型驗證方法(一)






 工商網監
工商網監
評論