 武漢紡織大學機械工程與自動化學院DSP實驗室建設案例
武漢紡織大學機械工程與自動化學院DSP實驗室建設案例
武漢紡織大學是國家首批“中西部高校基礎能力建設工程”建設高校、教育部“卓越工程師教育培養計劃”實施高校、湖北省“國內一流學科”建設高校、全國十大時裝名校。
學校在新中國振興民族輕工業的呼聲中應運而生,前身是始建于1958年的武漢紡織工學院,1999年更名為武漢科技學院,湖北省對外貿易學校、湖北財經高等專科學校先后并入,2010年更名為武漢紡織大學。
機械工程與自動化學院創建于1978年,是學校辦學規模大、綜合實力強、辦學底蘊最為深厚的院系之一。
學院現有四個本科專業(機械設計制造及其自動化、智能制造工程、機器人工程、自動化)。其中機械設計制造及其自動化專業被評為國家一流特色專業、教育部“卓越工程師計劃”專業、國家管理的本科專業點、湖北省品牌專業,自動化專業被評為湖北省一流特色專業。
2?
帶您了解培訓流程
實驗室:控制理論及MCU技術實驗室
實驗箱:TL28335-PlusTEB
培訓人:創龍教儀技術服務工程師
受訓人:任課老師、實驗室老師



參與培訓的老師和學生們對TL28335-PlusTEB相關實驗操作表現出十足的熱情,并對創龍教儀專業的技術能力與認真的工作態度表示了肯定。
面對日新月異的技術發展,創龍教儀在不斷學習與探索新技術與高校新需求之間的聯系,并通過不斷改進的產品助力高校培養能夠適應新社會生產需求的高級人才,以響應國家“產教融合”的方針!
TL28335-PlusTEB相關實驗(部分) | |
DSP實驗環境搭建與CCS開發基礎 | 安裝CCS與串口調試工具 編寫基于C語言的DSP程序 |
DSP基礎外設實驗 | LED燈控制實驗 4x4鍵盤輸入控制實驗 UART串口收發實驗 定時器/計數器控制實驗 模數轉換(A/D)測試實驗 交通燈控制實驗 |
電機控制類實驗 | 直流有刷電機控制實驗 減速編碼電機控制實驗 步進電機控制實驗 BLDC開環控制實驗 PMSM開環控制實驗 |
語音類實驗 | 音頻采集與播放測試實驗 G711A音頻編碼實驗 G711A音頻解碼實驗 |
DSP算法實驗 | 有限沖激響應濾波器(FIR)算法 無限沖激響應濾波器(IIR)算法 快速傅立葉變換(FFT)算法 語音信號的FIR濾波 模擬DVR算法 |
圖像類實驗 | 灰度圖像直方圖 直方圖均衡化 圖像反色 邊緣檢測 |
3?
特色案例
實驗名稱:減速編碼電機控制實驗、
實驗目的:
(1)理解PID控制原理。
(2)學習增量式PID算法的原理。
(3)掌握PID閉環控制電機的實現。
實驗原理:
模擬PID控制原理
在過程控制中,按偏差的比例(P)、積分(I)和微分(D)進行控制的PID控制器(亦稱PID調節器)是應用最為廣泛的一種自動控制器。PID控制器原理簡單,易于實現,適用面廣,控制參數相互獨立,參數的選定比較簡單。
模擬PID控制系統的常規原理框圖如下圖所示。系統由模擬PID控制器和被控對象組成,r(t)是給定值,y(t)是系統的實際輸出值,給定值與實際輸出值構成控制偏差e(t)。
e(t)=r(t)-y(t)
控制偏差e(t)是PID控制的輸入,u(t)是PID控制器的輸出和被控對象的輸入。模擬PID控制器的控制規律為

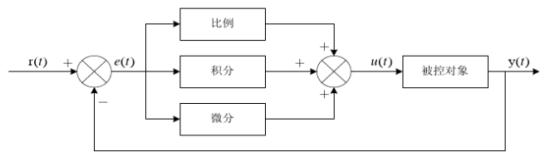
控制器的輸出與輸入誤差信號成比例,當僅有比例控制時系統輸出存在穩態誤差。在模擬PID控制器中,比例控制的作用是對偏差瞬間做出反應。偏差產生后控制器立刻起控制作用,使偏差變小。比例系數Kp決定了控制作用的強弱,Kp越大,控制作用越強,過度越快,偏差也就越小。但是Kp越大,也更加容易產生振蕩,破壞系統的穩定性。因此,比例系數Kp必須選擇適當,才能使過渡時間變小,偏差小又穩定。
增量式PID算法
數字式PID控制算法可以分為位置式PID和增量式PID控制算法。在本實驗中使用的增量式PID算法。增量式PID控制算法只需要計算控制量的增量。

可得控制器在第k-1個采樣時刻的輸出值為:
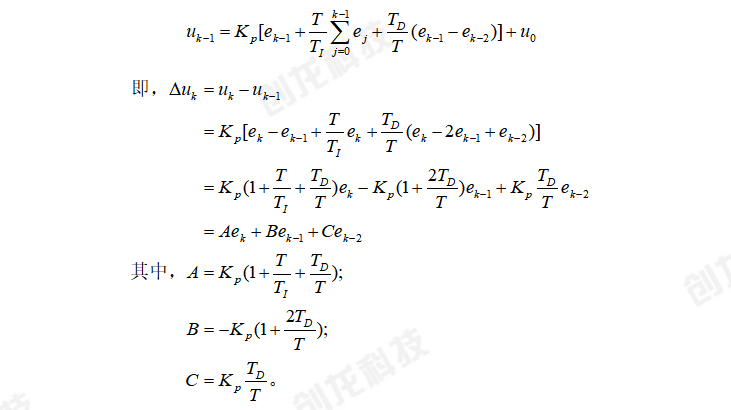
如果采用恒定的采樣周期T,一旦確定了A、B、C,只要使用前后3次測量值的偏差,就可以求出控制增量。
除此之外,還有另一種算法:
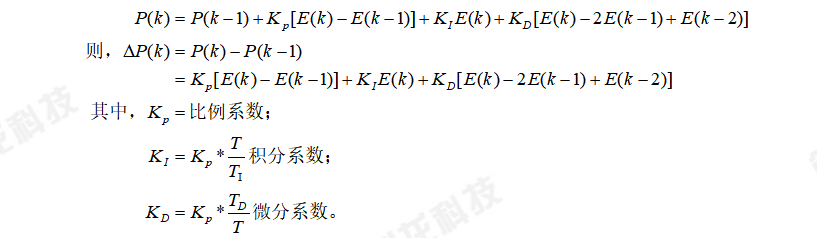
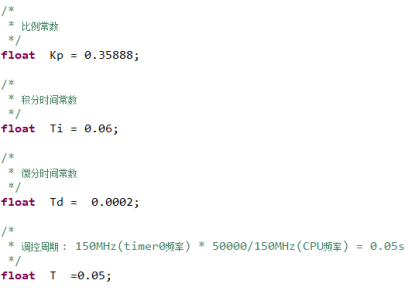
PID算法程序解析
打開光盤資料中的"Demo\KingBox\Application\DC_GEAR_MOT\main.c"文件,可查看相關代碼。比例常數、積分時間常數、微分時間常數和調控周期如下:
主函數中首先初始化系統控制,配置CPU主頻、寄存器和初始化PIE控制等。調用InitMeasureSpeed函數初始化時鐘、中斷等。InitMeasureSpeed函數如下:
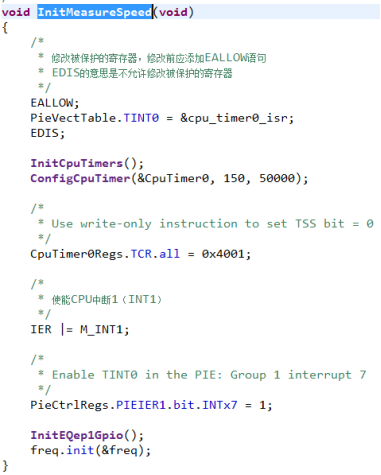
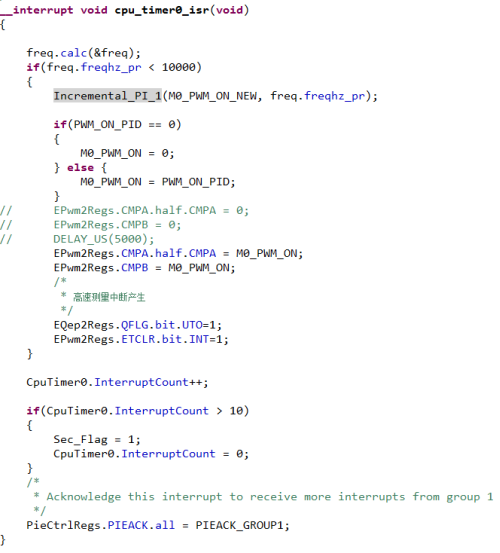
InitMeasureSpeed函數中,cpu_timer0_isr定時器中斷函數中定時采集速度,并用于PID算法。freq.freqhz_pr為采集的電機脈沖數,M0_PWM_ON為高電平時間,M0_PWM_ON_NEW為新的高電平時間,PWM_ON_PID是經過PID算法后的高電平時間。cpu_timer0_isr定時器中斷函數如下:
實驗步驟
(1)對實驗設備進行硬件部分連接,連接好仿真器和USB串口線(默認為USB to UART串口輸出)并上電。
(2)右擊計算機圖標,點擊“設備管理器->通用串行總線控制器”或者“設備->端口(COM和LPT)”,查看是否有對應的仿真器的選項出現,如有說明仿真器驅動已經正常安裝,否則請先正確安裝CCS。同時查看串口的端口號。
(3)打開串口軟件并設置串口調試工具,波特率為115200。
(4)按照工程導入步驟導入光盤資料"Demo\KingBox\Application"路徑下的DC_DEAR_MOT工程。
(5)編譯工程生成DC_DEAR_MOT.out的可執行程序。
(6)實驗箱上電,確認仿真文件(.ccxml 文件)配置,并連接CPU。
(7)加載DC_DEAR_MOT.out可執行程序,并運行程序,本實驗的功能是實現PID閉環控制電機。
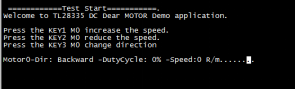
實驗現象
運行程序之后,串口顯示如下圖所示:
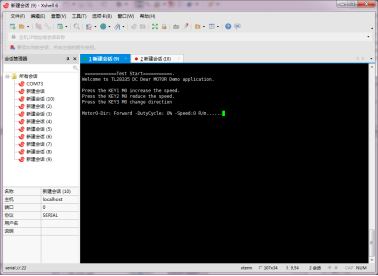
同時,數碼管顯示電機的轉速和轉向(0是轉速,F代表順時針轉),如下:

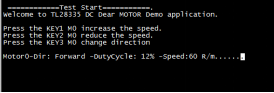
第一次按下按鍵1后,減速直流電機開始順時針(Forward)轉動,占空比(DutyCycle)約為12%,轉速(Speed)約為60R/min,顯示如下圖所示:
按下按鍵3后,電機會停止轉動,同時串口打印電機轉向為逆時針(Backward),電機轉向由順時針改為逆時針,如下:
4?
設備概述
//

產品型號:TL28335-PlusTEB
處理器型號:TMS320F28335
應用領域:測控、自動化、工業控制、電力控制和電機控制
-
dsp
+關注
關注
554文章
8059瀏覽量
350451 -
自動化
+關注
關注
29文章
5622瀏覽量
79668 -
機械設計
+關注
關注
7文章
168瀏覽量
19527
發布評論請先 登錄
相關推薦
武漢傳媒學院攜手創龍教儀:DSP C6000聯合實驗室建設范例分享

武漢傳媒學院聯合創龍教儀建設DSP教學實驗箱,基于DSP C6000平臺搭建
荊州學院聯合創龍教儀建設DSP教學實驗箱案例分享
重慶高校大學智能制造實驗室數字孿生可視化系統平臺建設項目驗收
淺談天津高校大學智能制造實驗室數字孿生可視化系統平臺建設項目
寧波職業技術學院DSP實驗室建設案例—以及H264編碼實驗案例簡介
武漢高校大學智能制造實驗室數字孿生可視化系統平臺介紹
智慧機械·創新未來 | 思看科技 X 浙大機械工程學院產教融合研討會成功舉辦!

怎么建設高性能多核DSP+FPGA實驗室?一起來河北工程大學看看
創龍教儀聯合武漢紡織大學機械工程與自動化學院DSP實驗室建設案例
準確測量助力材料研究,武漢紡織大學采購多臺南京大展導熱系數測定儀

浙江大學機械工程學院—思看科技三維掃描實踐教學實驗室正式揭牌!





 工商網監
工商網監
評論