 簡述機器人控制系統的組成
簡述機器人控制系統的組成
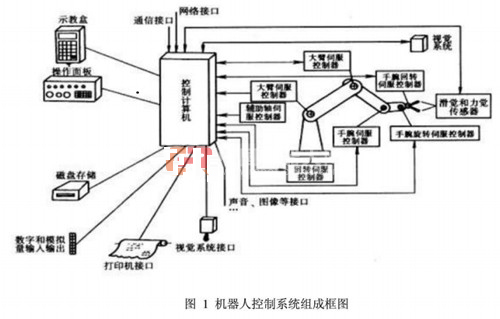
機器人控制系統是機器人技術的核心,它負責接收輸入信號,處理信息,控制機器人的運動和執行任務。一個完整的機器人控制系統通常由以下幾個部分組成:
- 傳感器系統
傳感器系統是機器人控制系統的重要組成部分,它負責收集機器人與環境之間的信息。傳感器的種類繁多,包括視覺傳感器、觸覺傳感器、力覺傳感器、聲音傳感器、距離傳感器等。這些傳感器可以實時獲取機器人與環境之間的信息,為機器人的決策提供依據。
1.1 視覺傳感器
視覺傳感器是機器人控制系統中最常見的傳感器之一,它通過攝像頭捕捉圖像,然后將圖像轉換成數字信號,供機器人進行處理。視覺傳感器可以分為單目視覺、雙目視覺、3D視覺等類型。單目視覺只能獲取二維圖像,而雙目視覺和3D視覺可以獲取三維空間信息。
1.2 觸覺傳感器
觸覺傳感器可以感知機器人與物體接觸時的壓力、溫度等信息。觸覺傳感器通常安裝在機器人的手指、手臂等部位,以便機器人能夠感知物體的形狀、硬度等特性。
1.3 力覺傳感器
力覺傳感器可以測量機器人與物體之間的力,包括力的大小、方向等。力覺傳感器通常安裝在機器人的關節、末端執行器等部位,以便機器人能夠感知施加在物體上的力。
1.4 聲音傳感器
聲音傳感器可以捕捉周圍環境中的聲音信號,并將聲音信號轉換成數字信號。聲音傳感器可以用于語音識別、環境監測等應用。
1.5 距離傳感器
距離傳感器可以測量機器人與物體之間的距離。常見的距離傳感器有超聲波傳感器、激光傳感器、紅外傳感器等。距離傳感器可以用于避障、導航等應用。
控制器是機器人控制系統的核心部件,它負責接收傳感器信號,處理信息,生成控制指令,驅動機器人的運動。控制器通常由微處理器、輸入/輸出接口、通信接口等組成。
2.1 微處理器
微處理器是控制器的核心部件,它負責執行控制算法,處理傳感器信號,生成控制指令。微處理器的性能直接影響到機器人控制系統的性能。常見的微處理器有ARM、DSP、FPGA等。
2.2 輸入/輸出接口
輸入/輸出接口是控制器與傳感器、執行器之間的連接部件。輸入接口用于接收傳感器信號,輸出接口用于發送控制指令。常見的輸入/輸出接口有GPIO、PWM、I2C、SPI等。
2.3 通信接口
通信接口是控制器與其他設備之間的連接部件。常見的通信接口有以太網、Wi-Fi、藍牙、ZigBee等。通信接口可以實現機器人之間的協同工作,也可以實現機器人與遠程控制中心的通信。
- 執行器
執行器是機器人控制系統的執行部件,它負責將控制指令轉換為機械運動。常見的執行器有電機、液壓缸、氣缸等。
3.1 電機
電機是機器人控制系統中最常用的執行器之一,它通過電磁力驅動機器人的運動。電機可以分為直流電機、交流電機、步進電機、伺服電機等類型。直流電機和交流電機通常用于簡單的運動控制,而步進電機和伺服電機則用于精確的運動控制。
3.2 液壓缸
液壓缸是利用液壓原理驅動機器人運動的執行器。液壓缸具有輸出力大、響應速度快等優點,但同時也存在體積大、成本高等問題。
3.3 氣缸
氣缸是利用氣壓原理驅動機器人運動的執行器。氣缸具有結構簡單、成本低廉等優點,但輸出力相對較小,適用于輕型機器人。
- 控制算法
控制算法是機器人控制系統的核心,它負責根據傳感器信號和任務要求,生成控制指令。常見的控制算法有PID控制、自適應控制、模糊控制、神經網絡控制等。
4.1 PID控制
PID控制是一種經典的控制算法,它通過比例(P)、積分(I)、微分(D)三個參數來調整控制指令。PID控制具有實現簡單、穩定性好等優點,但對參數調整要求較高。
4.2 自適應控制
自適應控制是一種能夠根據系統參數變化自動調整控制參數的控制算法。自適應控制具有魯棒性好、適應性強等優點,但實現難度較大。
4.3 模糊控制
模糊控制是一種基于模糊邏輯的控制算法,它能夠處理不確定性信息,實現模糊推理。模糊控制具有實現簡單、適應性強等優點,但對模糊規則的設計要求較高。
4.4 神經網絡控制
神經網絡控制是一種基于人工神經網絡的控制算法,它能夠實現非線性系統的控制。神經網絡控制具有自學習能力、適應性強等優點,但訓練過程較慢,對數據質量要求較高。
-
傳感器
+關注
關注
2553文章
51390瀏覽量
756572 -
控制系統
+關注
關注
41文章
6658瀏覽量
110885 -
機器人
+關注
關注
211文章
28641瀏覽量
208405 -
輸入信號
+關注
關注
0文章
469瀏覽量
12608
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論