 干貨!國產Cortex-A55人工智能實驗箱機械臂積木搬運實驗案例
干貨!國產Cortex-A55人工智能實驗箱機械臂積木搬運實驗案例
人工智能實驗箱重磅襲來!
一、實驗目的
本實驗通過TL3568-PlusTEB教學實驗箱操作機械臂把不同顏色的四個積木從下到上按照藍綠紅黃的順序疊起來放到中間灰色的方塊上。
二、實驗原理
機械臂自由度
機械手自由度,是指傳送機構機械手的運動靈活性。通常把傳送機構的運動稱為傳送機構的自由度。
人從手指到肩部共有27個自由度。而如將機械手的手臂也制成這樣多的自由度,既困難又不必要。
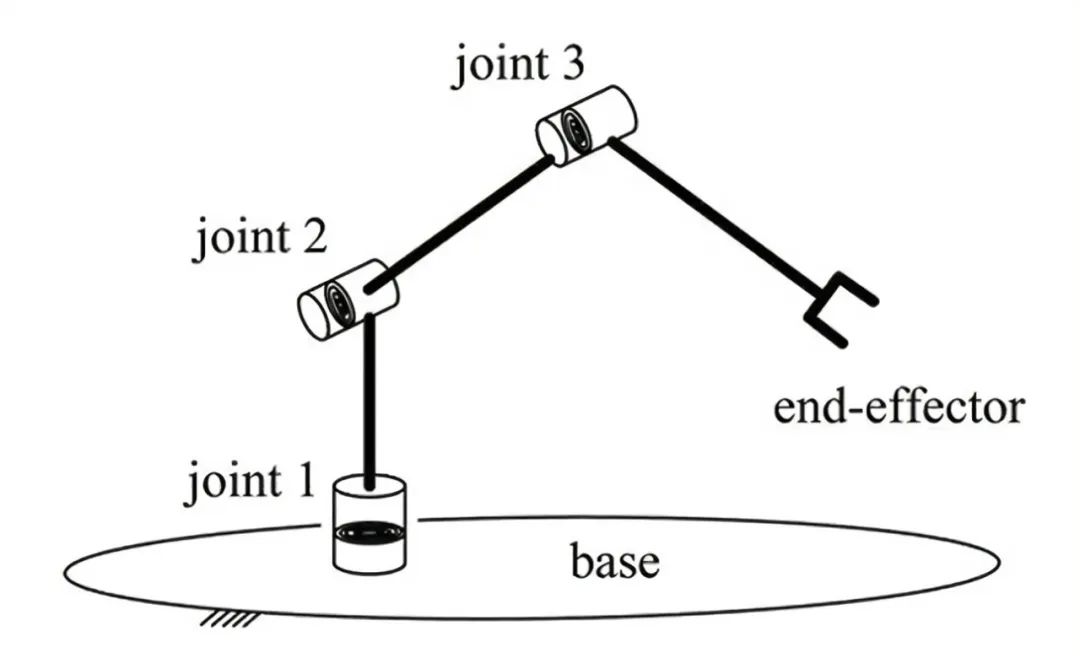
從力學的角度分析,物件在空間只有6個自由度。因此為抓取和傳送在空間不同位置和方位物件,傳送機構也應具有6個自由度。
實驗程序流程
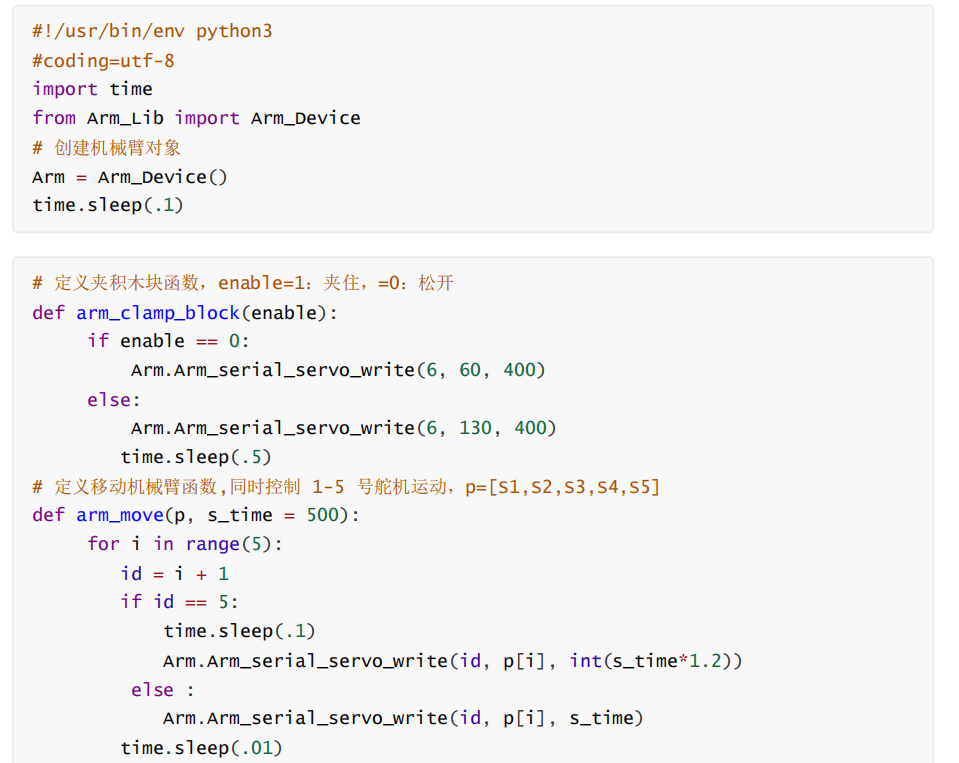
1、創建機械臂對象
2、定義夾積木塊函數
3、定義移動機械臂函數,同時控制 1-5 號舵機運動
4、機械臂向上移動
5、定義不同位置的變量參數
6、讓機械臂移動到一個準備抓取的位置
7、夾取實現搬運積木
三、操作現象
人工智能實驗箱重磅襲來!
基于 Cortex-A55 教學實驗室建設方案
RK3568國產化高性能處理器
2.0GHz超高主頻
1T超高算力NPU






多元化教學專業與課程
教學專業 | 教學課程 |
人工智能 | 《人工智能》 |
自動化 | 《嵌入式系統設計》 |
物聯網工程 | 《ARM系統開發》 |
計算機科學與技術 | |
《移動互聯網技術》 | |
通信工程 | 《物聯網設計方法與應用》 |
電子信息工程 |
嵌入式基礎實驗
第一章
ARM實驗環境搭建與Linux開發基礎
第二章
Linux 設備驅動程序開發實驗
第三章
Linux 設備驅動程序開發實驗
第四章
基于ARM基礎外設實驗
第五章
Linux Qt 開發實驗
第六章
Linux Python 開發實驗
人工智能實驗
第一章
Python基礎章節實驗
第二章
圖像處理(Python OpenCV)實驗
第三章
深度學習實驗
第四章
機械學習實驗
第五章
機器控制實驗
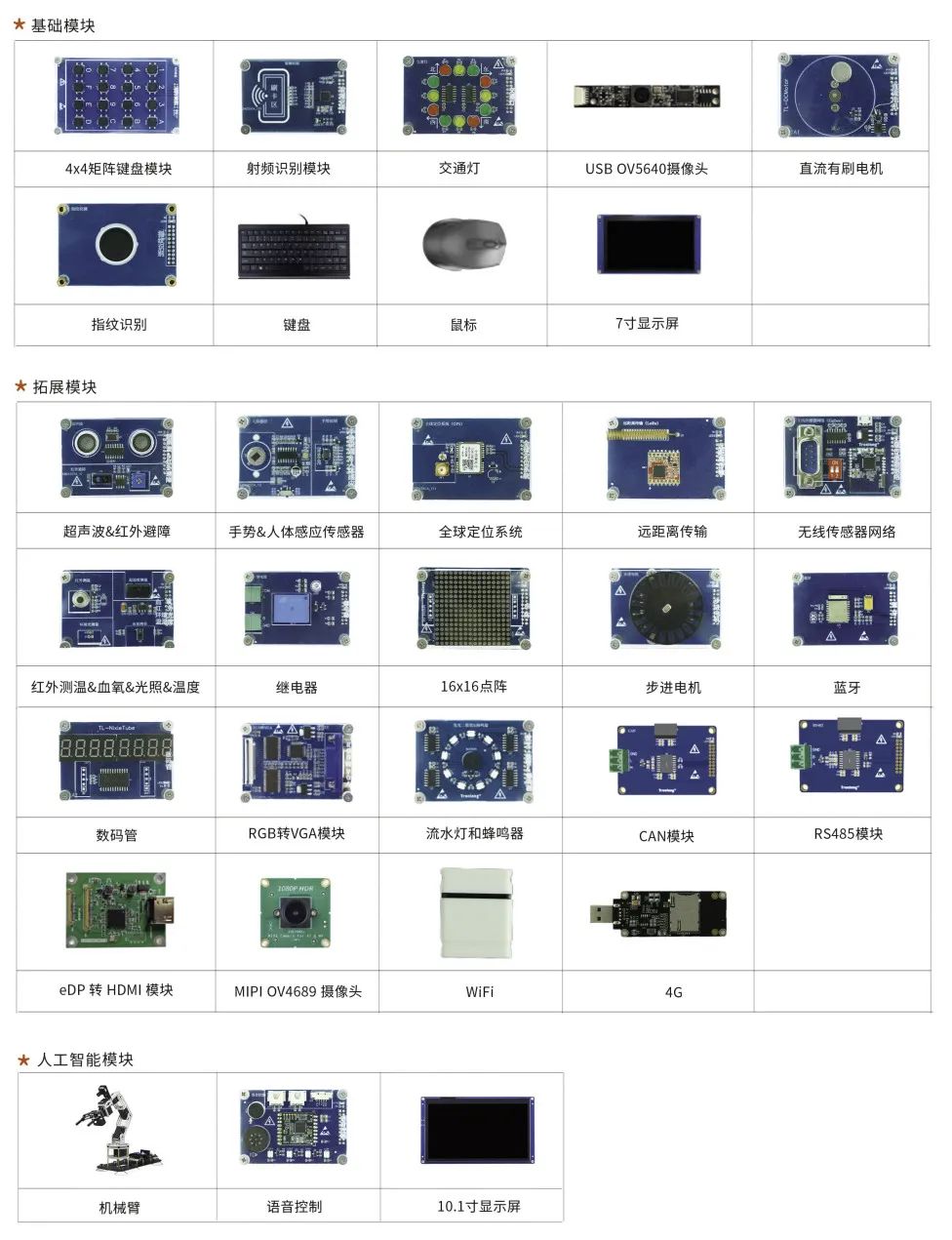
30+拓展模塊任意搭配
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
人工智能
+關注
關注
1796文章
47683瀏覽量
240302 -
實驗箱
+關注
關注
0文章
62瀏覽量
9114 -
機械臂
+關注
關注
12文章
520瀏覽量
24725
發布評論請先 登錄
相關推薦
深度解析!RK3568 加持機械臂是如何實現顏色識別與抓取的?
一、產品簡介TL3568-PlusTEB人工智能實驗箱國產高性能處理器64位4核低功耗2.0GHz超高主頻1T超高算力NPU兼容鴻蒙等國產操

RK3568國產實驗箱+人工智能機械臂:跳舞、疊羅漢、夾方塊、積木搬運案例全解!
一、產品簡介TL3568-PlusTEB人工智能實驗箱國產高性能處理器64位4核低功耗2.0GHz超高主頻1T超高算力NPU兼容鴻蒙等國產操
國產芯RK3568教學實驗箱操作案例:顏色識別抓取積木
)實驗擺放位置按照黃色區域放置黃色積木塊,紅色區域放置紅色積木塊,綠色區域放置綠色積木塊,藍色區域放置藍色積木塊。
(6)將
發表于 12-05 14:30
Cortex-A55 處理器到底什么來頭?創龍教儀一文帶您了解
景
Cortex-A55廣泛應用于移動設備、嵌入式系統等領域。在移動設備中,它作為智能手機、平板電腦等移動設備的核心處理器,提供流暢的用戶體驗和持久的電池續航。在嵌入式系統中,它作為工業控制、智能家居、物聯網設備等
發表于 12-03 17:00
RK3568人工智能教學實驗箱操作案例分享:5-37 ADC波形顯示實驗
一、產品簡介
TL3568-PlusTEB人工智能實驗箱
國產高性能處理器、64 位 4 核低功耗、2.0 GHz超高主頻、1T 超高算力 NPU
兼容鴻蒙等
發表于 11-12 11:04
國產Cortex-A55實驗箱:輕松上手,人工智能環境搭建教程
操作步驟1、實驗箱(或者電腦)需要聯網2、拷貝文件拷貝Miniconda3-latest-Linux-aarch64.sh到開發板(電腦上的Ubuntu安裝
Cortex-A55人工智能教學實驗箱操作教程_案例分享:5-26 血氧檢測實驗
和串口調試工具Xshell。
本實驗中使用的是TL3568-PlusTEB實驗箱,所需的配件為Micro SD卡、Type-C線、電源和血氧&紅外測溫&環境光&
發表于 10-15 16:34
干貨!國產Cortex-A55人工智能實驗箱機械臂跳舞實驗案例
TL3568-PlusTEBAI人工智能實驗箱重磅襲來!基于Python機械臂跳舞實驗一、
國產Cortex-A55人工智能教學實驗箱_基于Python機械臂跳舞實驗案例分享
一、實驗目的
本實驗通過TL3568-PlusTEB教學實驗箱修改機械臂不同舵機的角度,增加延遲
發表于 06-28 14:37
為什么更推薦Cortex-A55教學實驗箱?我來告訴您!
丨國產嵌入式芯片,助力“中國芯”工程!TL3568-PlusTEB是一款基于瑞芯微RK3568國產化處理器設計的4核ARMCortex-A55嵌入式教學實驗
基于“中國芯”RK3568 ARM Cortex-A55教學實驗箱強勢首發
丨?瑞芯微國產高性能處理器基于瑞芯微RK3568四核ARMCortex-A55高性能處理器,主頻高達2.0GHz,集成MaliG52圖形處理器和獨立的人工智能NPU處理器。RK3568支持三屏異顯
創龍教儀基于瑞芯微3568的ARM Cortex A-55教學實驗箱 適用于人工智能 傳感器 物聯網等領域
與應用》、《人工智能》等課程。
適用專業
Cortex-A55 ARM嵌入式實驗箱主要面向電子信息工程專業方向,同時也可適用于通信工程、電子科學與技術、光電信息工程、計算機科學與技術、
發表于 03-22 14:29





 工商網監
工商網監
評論