 AGV的四點關鍵技術,你都了解嗎?
AGV的四點關鍵技術,你都了解嗎?
在現代化工業的發展中,提倡高效,快速,可靠,提倡將人從簡單的工作中解放出來。機器人逐漸替代了人出現在各個工作崗位上。機器人具有可編程、可協調作業和基于傳感器控制等特點,自動導向小車(Automated Guided Vehicle 簡稱AGV)便是移動機器人的一種,是現代化工業物流系統中的重要設備,主要為儲運各類物料,為系統柔性化、集成化、高效運行提供了重要保證。
AGV小車有三個關鍵系統,運行系統、導引系統、控制系統,其它還包括有路線系統及安全保護系統等。
(1)導引及定位技術
作為AGV技術研究的核心部分,導引及定位技術的優劣將直接關系著AGV的性能穩定性、自動化程度及應用實用性。

AGV小車
(2)路徑規劃和任務調度技術
第一,行駛路徑規劃。行駛路徑規劃是指解決AGV從出發點到目標點的路徑問題,即“如何去”的問題。現階段國內外已經有大量的人工智能算法被應用于AGV行駛路徑規劃中,如蟻群算法、遺傳算法、圖論法、虛擬力法、神經網絡和AI算法等。
第二,作業任務調度。作業任務調度是指根據當前作業的請求對任務進行處理,包括對基于一定規則的任務進行排序并安排合適的AGV處理任務等。需要綜合考慮各個AGV的任務執行次數、電能供應時間、工作與空閑時間等多個因素,以達到資源的合理應用和最優分配。
第三,多機協調工作。多機協調工作是指如何有效利用多個AGV共同完成某一復雜任務,并解決過程中可能出現的系統沖突、資源競爭和死鎖等一系列問題。現在常用的多機協調方法包括分布式協調控制法、道路交通規則控制法、基于多智能體理論控制法和基于Petri網理論的多機器人控制法。

定制地牛AGV
(3)運動控制技術
不同的車輪機構和布局有著不同的轉向和控制方式,現階段AGV的轉向驅動方式包括如下兩種:兩輪差速驅動轉向方式,即將兩獨立驅動輪同軸平行地固定于車體中部,其它的自由萬向輪其支撐作用,控制器通過調節兩驅動輪的轉速和轉向,可以實現任意轉彎半徑的轉向;操舵輪控制轉向方式,即通過控制操舵輪的偏航角實現轉彎,其存在最小轉彎半徑的限制。
控制系統通過安裝在驅動軸上的編碼器反饋來組成一個閉環系統,目前基于兩輪差速驅動的AGV路徑跟蹤方法主要有:PID控制法、最優預測控制法、專家系統控制法、神經網絡控制法和模糊控制法。
(4)信息融合技術
信息融合是指利用多源信息的關聯組合,充分識別、分析、估計和調度數據,完成下達決策和精確處理信息的任務,并對周圍環境、戰況等進行適度的估計。目前,在導引領域研究和應用的信息融合技術主要有Kalman濾波、貝葉斯估計法與D-S證據推理等,其中以Kalman濾波最廣。Kalman濾波具有良好的實時性,但它是建立在嚴格的數學模型的基礎上,當導引模型存在較大建模誤差或者系統特性發生變化時往往會導致濾波發散。
為提高濾波算法的魯棒性和自適應能力,可針對AGV的導引要求與特點,研究適當的自適應Kalman濾波算法、魯棒濾波算法或智能濾波(如模糊推理、神經網絡、專家系統)方法等。

AGV叉車
隨著智能制造的快速發展,工廠智能化已成為不可逆的發展趨勢,AGV作為柔性生產線和立庫等現代化倉儲體系的關鍵設備之一,具有自動化程度高、靈敏、安全等特色,在智能工廠中占據了重要的地位。
智能制造是軟硬件的整合,獨立的硬件并不能發揮其最大的作用。通常AGV與MES系統、WMS系統相結合,借助MES信息化管理平臺,能夠高效、準確、靈活地完成物料的搬運任務,提高生產的柔性度及倉儲的智能化。
審核編輯 黃宇
-
AGV
+關注
關注
27文章
1331瀏覽量
41257 -
AGV小車
+關注
關注
4文章
173瀏覽量
11197
發布評論請先 登錄
相關推薦
Arm帶你了解2025年及未來在不同技術市場的關鍵技術方向
云計算HPC軟件關鍵技術
鳳凰動力告訴你,為什么要用AGV專用腳輪
LLM大模型推理加速的關鍵技術
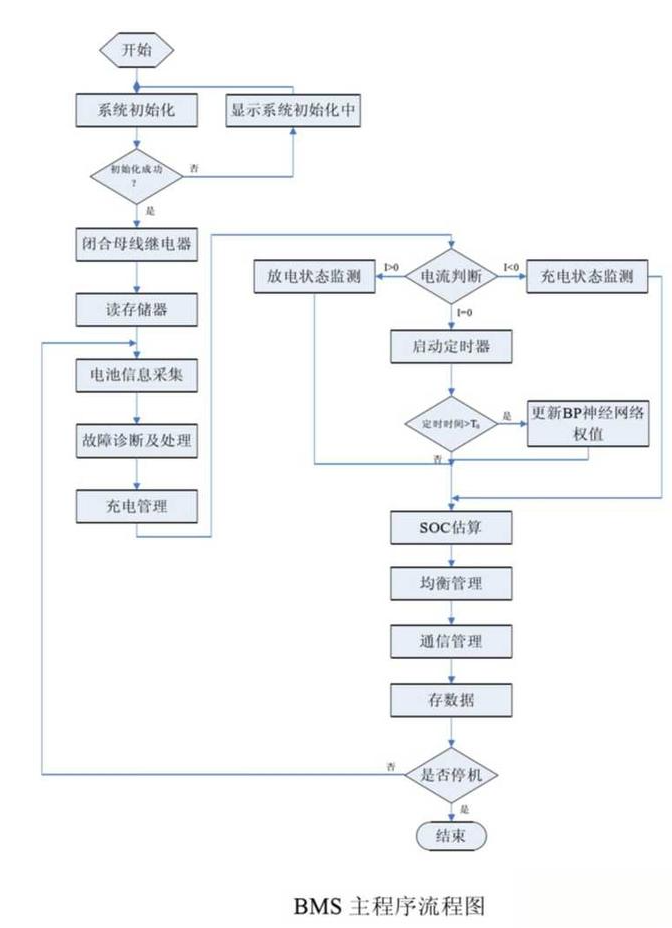
儲能BMS的關鍵技術是什么
智能座艙軟硬件關鍵技術梳理

矢量網絡分析儀的關鍵技術指標解讀
M8連接器6芯的關鍵技術參數是什么

車載電池的類型及關鍵技術分析







 工商網監
工商網監
評論