 整車控制器VCU應用層算法開發流程
整車控制器VCU應用層算法開發流程
一、整車控制器(VCU)功能

整車控制器
新能源汽車整車控制器(Vehicle Control Unit,簡稱VCU)是電動汽車中的關鍵部件,負責對整車進行控制和管理。新能源汽車整車控制功能具有駕駛員意圖識別、動力控制、電池管理控制、電機控制、增程器控制等主要功能。能夠對上/下電時的高/低壓控制邏輯進行管理,能夠根據駕駛員輸入對需求扭矩做出準確判斷,能夠對車輛當前工況進行判斷,能夠實現需求扭矩獲取、扭矩分配請求和扭矩限制功能;可以實現再生制動功能,并且協調制動能量回收過程電機制動與 ABS/ESP系統,保證制動安全;能夠識別零部件及系統功能故障,并采取相應的應對策略,提供系統故障保護下的跛行等故障處理功能。根據駕駛員操作實現對燈光、音響、電源和碰撞等舒適控制功能;對電池系統充放電和電池診斷管理控制功能。
整車控制模塊還需要實現對車輛附件的控制,能夠實現對輸入/輸出信號的處理(包括濾波、抗抖、滯回處理,保證輸入可靠有效,輸出明確),實現全車 CAN 網絡及網關路由,具有故障診斷功能、能量管理相關系統的關鍵信息。
獲取駕駛意圖:VCU需要通過油門踏板、剎車踏板、檔位狀態等駕駛輸入信號判斷駕駛意圖。
HMI信息反饋:VCU需要將關鍵信息反饋至HMI,從而告知駕駛人員車輛狀態。
信息交互:將動力系統,電機、電池、高壓系統、空調的主要數據、故障狀態等傳到儀表,接收駕駛員的控制信息。
電機控制:通過獲取車輛各傳感器數據(包括車速、轉向角度、加速踏板位置等),實時調整電動機轉速和扭矩,實現車輛加速、減速和行駛穩定性控制。能量管理:通過剎車傳感器反饋信號,控制制動系統工作,包括制動力分配、ABS、TCS等,確保車輛制動過程中的穩定性和安全。
驅動模式選擇:根據駕駛員需求和路況條件,選擇純電驅動、混合驅動和發動機驅動模式,以達到更好的動力性能和能源利用效率。
故障診斷與安全保護:監測整車各部件狀態和工作情況,發現異常會及時發出警告或報警信號,并采取相應措施。同時,VCU具備故障自診斷功能,實時檢測和分析故障并提供相應的修復方案。
通訊功能:與其他控制單元(如電池管理系統、動力轉換單元等)信息交互,實現車輛各系統協調工作,確保整車系統正常運行。
在 VCU 軟件開發過程中,開發流程至關重要,它是保證開發軟件質量的重要手段之一。所開發的整車控制器軟件需要經過各種不同層面的測試,調整和驗證才能最終作為產品發布出去。采用先進的測試方法和手段,如 MiL 測試、HiL 測試、實車測試等整車驗證。
二、開發過程中參考標準及縮寫
VCU應用層算法開發過程主要供參考標準如下表所示:
表 1-1參考標準列表
| 序號 | 標準 |
| 1 | ISO 14229-1 道路車輛 統一診斷服務 第一部分:規范和需求 |
| 2 | ISO 15765-3 道路車輛 控制局域網絡診斷 第三部分:統一標準的診斷服務實施 |
| 3 | GBT19596-2004 電動汽車術語 |
| 4 | QCT413-2002 汽車電器設備基本技術條件 |
| 5 | GB-T27930-2011電動汽車非車載傳導式充電機與電池管理系統之間的通信協議 |
| 6 | GBT20234.1-2015 電動汽車傳導充電用連接裝置 第1部分:通用要求 |
| 7 | GBT20234.2-2015 電動汽車傳導充電用連接裝置 第2部分 交流充電接口 |
| 8 | GBT20234.3-2015 電動汽車傳導充電用連接裝置 第3部分 直流充電接口 |
| 9 | QCT897-2011 電動汽車用電池管理系統技術條件 |
| 10 | GBT18384.1 電動汽車安全要求-車載儲能裝置 |
| 11 | GBT18384.2電動汽車安全要求-功能安全和故障保護 |
| 12 | GBT18384.3 電動汽車安全要求-人員觸電防護 |
| 13 | GBT18385 電動汽車動力性能試驗方法 |
VCU應用層算法開發過程涉及到縮寫術語如下表所示:
表 1-2參考標準列表
| 縮寫 | 英文全稱 | 中文解釋 |
| VCU | Vehicle Control Unit | 整車控制單元 |
| SOC | State of Charge | 荷電狀態 |
| MiL | Model in the Loop | 模型在環測試 |
| HiL | Hardware in the Loop | 硬件在環測試 |
| ABS | Anti-lock Braking System | 剎車防抱死系統 |
| ESP | ElectronicStabilityProgram | 車身電子穩定系統 |
| BMS | Battery Management System | 電池管理系統 |
| CAN | Controller Area Network | 控制器局域網 |
| MCU | Motor Control Unit | 電機控制單元 |
| AC | Air Conditioner | 空調 |
| PTC | Positive Temperature Coefficient | 空調加熱器 |
| DC/DC | Direct Current/Direct Current Converter | 直流/直流變換器 |
| EPS | Electronic Power Steering | 電動助力轉向系統 |
| SDD | System Design Document | 系統設計文檔 |
| DD | Data Dictionary | 數據字典 |
| STS | System test Document | 系統測試文檔 |
| SOP | Small-Outline Package | 批量生產 |
三、VCU控制器軟件架構
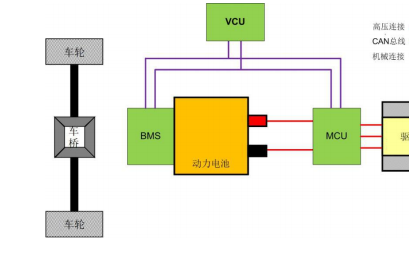
VCU 集成駕駛員意圖識別、動力控制、電池管理控制、電機控制、增程器控制等主要功能。作為目標車輛系統架構中的核心部件,VCU 根據采集駕駛員的操作指令、車速、電機轉速、SOC 和水溫等參數,實現既定的電機、電池和傳動系統的優化匹配目標。開發一款高性能、低成本的 VCU 對新能源汽車的動力性、經濟性、安全性等整車性能具有十分重要的影響。

圖3-1 VCU 軟件參考框架
控制功能
新能源汽車整車控制功能具有扭矩管理,電池、電機、發動機、燃料電池協調管理,充電管理,故障診斷,安全監控等功能。能夠準確判斷并反映的駕駛員的駕駛意圖,實現驅動和能量回收工況下的扭矩請求和限制保護,識別電機、電池、發動機、燃料電池等部件的故障并采取相應的控制策略,同時輸入狀態實現安全監控功能,確保車輛行駛安全可靠。
整車控制還需實現車輛附件的控制,包括空調、助力轉向、真空助力、熱管理系統等,實現對輸入輸出濾波、抗抖等處理,保證信號有效。實現整車總線通訊調度,實現各部件信號安全、高效、共享。

VCU 功能示意圖
新能源汽車整車控制器(VCU)通過完成以下主要功能實現對整車的動力性、安全性、經濟性及舒適性控制:
系統上/下電控制:低壓上電自檢;整車防盜認證;電池高壓上電控制;MCU 使能控制;READY 行車狀態指示;正常下電控制;故障下電控制。
駕駛檔位/模式管理:行車狀態識別;駐車控制;駐車解鎖控制;驅動檔位管理;換擋失敗提醒。
能量管理:能量計算;能量分配。
充放電管理:慢充充電;快充充電;預約充電;智能 12V 充電;外接放電。
駕駛模式管理:正常模型 Nommal;運動模式 Sport;經濟模式 ECO。
扭矩需求控制:加速扭矩計算;制動/滑行扭矩計算;蠕行扭矩控制;跛行扭矩計算;ESC 扭矩需求;定速巡航控制。
扭矩需求限制:電池功率限制;功率限制模式;電機特性限制;最高車速限制;整車加速限值;扭矩安全。
扭矩協調處理:扭矩協調切換;扭矩梯度限制;扭矩平滑處理。
碰撞管理:碰撞狀態識別;碰撞模式控制。
整車熱管理功能:溫度信號采集;高速/低速風扇控制;冷卻水泵控制;空調系統控制;PTC 功率限制。
附件管理功能:DC/DC 工作控制;Epark 駐車控制;EPS 使能控制;制動燈控制;EPB 控制;倒車燈控制;真空泵控制。
儀表顯示控制:續駛里程估算;功能參數顯示;故障狀態指示。
網關控制:報文轉發;信號拆包打包。
整車系統保護功能:最高車速超速保護;倒檔速度保護;整車驅動扭矩超限保護;能量回收扭矩超限保護;扭矩控制一致性保護;整車過溫保護;互鎖檢測保護。
故障診斷功能:系統故障識別;系統故障分級;故障處理。
四、開發流程
VCU 控制策略開發采用主流的基于模型的軟件開發模式,遵循國際通用標準的V字型開發流程,主要包括下圖所示幾個階段:
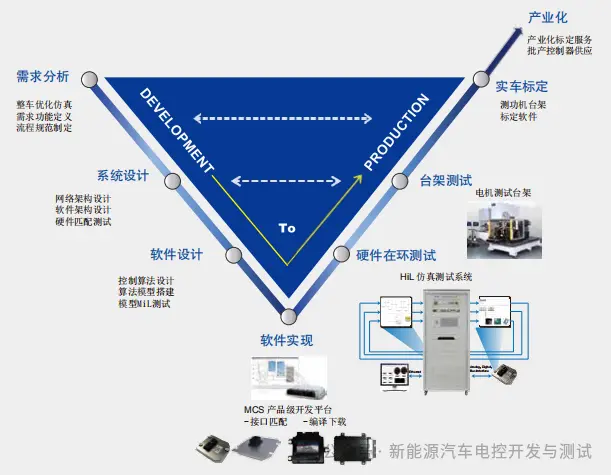
VCU開發流程
4.1 需求分析
本階段主要內容如下:
1)需求文檔化
分析客戶需求,研究受控對象,明確控制功能及系統配置,形成需求描述文檔。
2)開發流程及規范建立
開發流程及規范建立;命名規范建立;模塊測試流程/專家檢查流程建立;建模規范建立;測試規范建立。
4.2 系統設計
主要工作內容:
創建各模塊控制思想的數學化/工程化描述文檔 SDD(Software Design Document創建各模塊數據傳遞接口文檔 DD(Data Dictionary)
確定控制器 1O 和通訊接口
設計文檔建立標準:
SDD 設計文檔圖形化、邏輯化,且易于理解
DD 文檔輸入輸出定義清楚、全面
控制器接口電路圖規范清晰
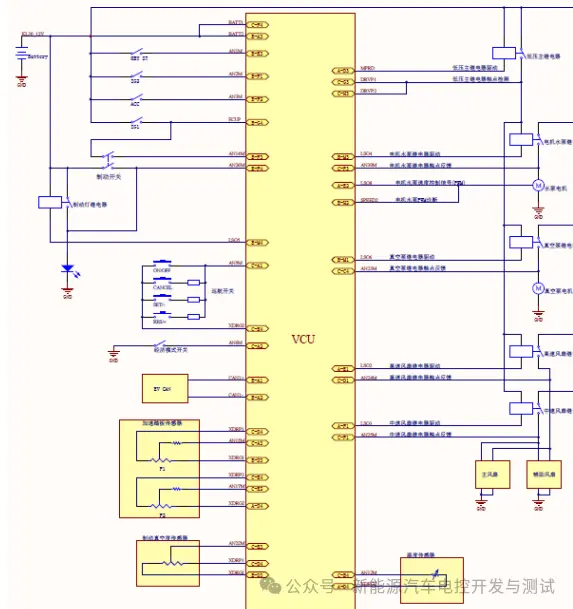
控制器外圍電氣原理參考
4.3 軟件設計
4.3.1 控制功能建模
使用模型化的編程工具 Matlab/Simulink 軟件,完成整車控制器控制功能各模塊模型搭建模型搭建主要要求如下:
軟件框架搭建合理有效
圖形化編程(Matlab/Simulink/Stateflow)
符合可測試性要求
符合建模規范要求
4.3.2 軟件檢查
為了保證軟件模型的質量,完成模型之后完成模型的 MAAB 規范檢査和 Model DesignVerifier,同時確保模型生成代碼之后,做 Miscr C 和 PolySpace。
1、MAAB 檢查
模型搭建之后,首先進做 MAAB 建模規范檢查,之后創建自定義的檢查規范
a)選擇整個模型或是其中一個子系統進行規范檢查。
b ) 按建模規范修改模型
2、Design Verifier 檢査
Design Verifer 使用形式化方法來識別模型中隱藏的設計錯誤。檢測模型中導致整數溢出.死邏輯、數組訪問越界和被零除的塊。可以形式化驗證設計符合功能需求。對于每個設計錯誤或違反設計需求,會生成一個仿真測試用例以供調試。
MISRA C檢查
用戶可以編寫自己的規范和檢查,先建立規范,輸入規范條文,然后建立檢查框架信息最后按照提供的例子進行 m腳本的編寫,實現規范的自動檢查。
a)用戶規范編寫
選擇庫瀏覽器規范,選擇新建,輸入新建規范的ID 和標題,選擇所在的庫,然后在出現的對話框中填寫規范所要求的內容,保存,即可生成新的規范。
b)用戶檢查框架信息編寫
選擇庫瀏覽器檢查,選擇新建,輸入新建檢查的ID 和標題,選擇所在的庫,然后在出現的對話框中填寫檢查所要求的內容,保存,即可生成新的檢查。
c )檢查腳本的編寫
d )在規范中引用檢查
4、PolySpace 檢查
軟件實現即編碼階段,在該階段軟件工程師希望隨著編碼進程查找并修復軟件缺陷和違背編碼規范之處,Bug Finder 可以助其快速迭代分析。Bug Finder 支持了當前主流的網絡安全標準檢查,代碼風格和命名規范則提供了簡單易行的定制界面和方法。
4.3.3 模型測試
控制策略完成后,進行模型在環測試(MiL),用于在生成代碼之前保證控制邏輯的正確性與準確性。根據目標車輛特性搭建車輛模型(或在已有模型基礎上修改,車輛模型不作為本項目提交物),并設計測試用例,對控制策略模型進行測試,提供詳細的測試報告。
MiL 測試內容主要包括:
1)搭建模型測試環境
2)模型測試與模型完善
3)撰寫測試報告
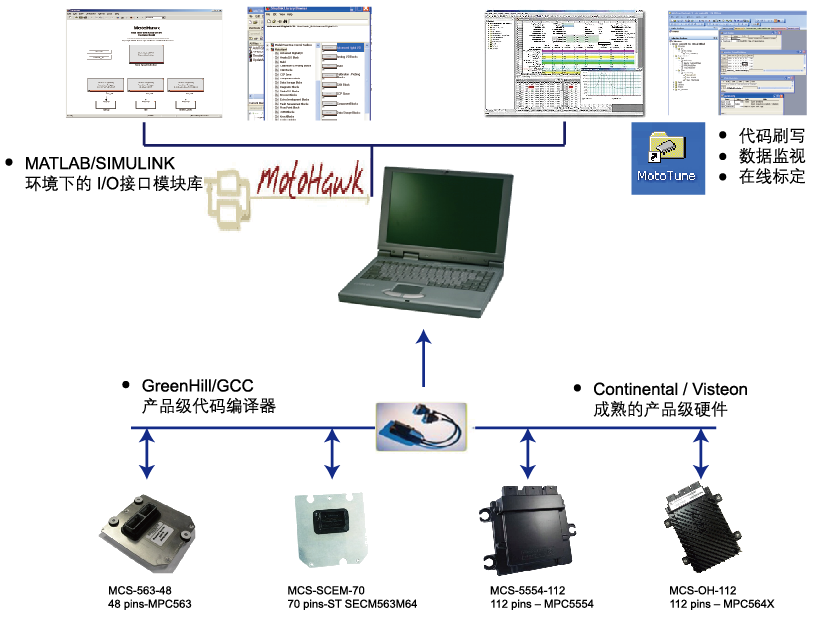
4.4 軟件實現
基于第三方的控制器硬件,通過控制器硬件識別的編譯器,將 simulink 模型軟件編譯成 C 代碼,然后把 ℃ 代碼與控制器底層軟件打包集成編譯成可執行代碼,下載到對應的控制器中,為后續測試環節做準備。
4.5 硬件在環測試
HiL 測試內容主要包括以下內容:
整車控制器核心控制算法功能測試:診斷功能測試;
網絡通信測試:
極限工況模擬測試;
編寫 HiL 測試報告;
4.6 臺架測試
臺架測試主要針對整車控制器、與電機臺架聯合調試。是否做臺架測試,可以在項目實施過程中視電機臺架實際情況決定。
4.7 實車測試
硬件平臺在裝車時,需在實車上進行整車控制器的標定,采用基于硬件供應商所支持協議的方式測試。標定工作達到雙方的功能需求和性能要求為標定結束的標志,在此期間工程師程序調整和標定參數調整。
4.8 高低溫測試
本項目在廠區基本測試和標定之后,進行低溫和高溫試驗,低溫試驗具體在環境倉中進行或者在實地測試場進行;根據 SOP的時間,高溫測試可以考慮環境倉或反季試驗進行,工程師制定整車控制器高低溫測試工作。
來源:新能源汽車電控開發與測試
-
電動汽車
+關注
關注
156文章
12186瀏覽量
232452 -
應用層
+關注
關注
0文章
46瀏覽量
11544 -
VCU
+關注
關注
17文章
82瀏覽量
20625 -
整車控制器
+關注
關注
3文章
48瀏覽量
6377
發布評論請先 登錄
相關推薦
整車控制器VCU基于模型開發
設計新能源整車控制器
整車控制器VCU簡介系統輸入與輸出及用于VCU的控制器型號詳細資料概述
淺談整車控制器VCU的下線功能檢測
電動車整車控制器vcu
新能源汽車整車控制器VCU快速開發平臺的系統組成

從0到1實現VCU:新能源汽車整車控制器






 工商網監
工商網監
評論