") 如何更高效地掌握步進電機的控制算法
如何更高效地掌握步進電機的控制算法
在對基于步進電機的運動控制系統(tǒng)設(shè)計進行優(yōu)化的過程中,工程師必須綜合考慮成本、性能、效率、未預(yù)料到的反饋難題(如機械共振)以及開發(fā)時間等因素。現(xiàn)代的電機控制系統(tǒng)面臨著在多種不利環(huán)境中工作的難題,而傳統(tǒng)解決方案的總效率通常受限于整個系統(tǒng)所遇到的最壞情況。自適應(yīng)控制算法對于提取出經(jīng)過優(yōu)化的機電系統(tǒng)的最大效率而言是必不可少的。
系統(tǒng)映射
如果希望得到最高效率,就必須對整個機電系統(tǒng)的邊界條件進行映射。所有的系統(tǒng)變量都必須考慮到:溫度、機械降解、加速度、速度、電源電壓等等。系統(tǒng)架構(gòu)也會對其產(chǎn)生影響。
在開環(huán)系統(tǒng)中,通常需要以最壞情況下的電流驅(qū)動和速度曲線來激勵電機,所以我們可以認為效率并不是這類系統(tǒng)的首要設(shè)計目標(biāo)。這種類型的測試非常耗費時間,因為必須在電機可能使用的所有電源電壓、溫度和速度值下對系統(tǒng)進行驗證,以盡量減小出現(xiàn)共振的風(fēng)險。每個步進電機系統(tǒng)都存在發(fā)生共振的可能,這通常是因為工作在(或接近于)電機的自然頻率而造成的。避開這些區(qū)域是至關(guān)重要的,因為共振可能會造成電機丟步或進入失速狀態(tài)。不過,對于開環(huán)系統(tǒng)而言,確定這些區(qū)域可能是非常困難的。
閉環(huán)控制通常采用以下兩種形式:基于傳感器的系統(tǒng)(光或是霍爾效應(yīng))和無傳感器的系統(tǒng)。無傳感器的系統(tǒng)也稱為“半閉環(huán)系統(tǒng)”,通常使用由電機線圈所產(chǎn)生的電壓來作為反饋。基于傳感器的控制系統(tǒng)使用得很廣泛,但是在映射實踐中必須考慮傳感器的其他變化。無傳感器的系統(tǒng)的一項主要優(yōu)勢在于,它只需要讀取與電機的物理運動有關(guān)的信息。它的另一項重要的優(yōu)勢是降低了閉環(huán)或半閉環(huán)系統(tǒng)的系統(tǒng)成本,同時,由于不需要外部傳感器,也降低了系統(tǒng)的復(fù)雜度。成功的設(shè)計需要理解反電動勢的特性。
SLA映射
反電動勢可以方便地提取出與機電系統(tǒng)的運動有關(guān)的詳細信息,并提供診斷數(shù)據(jù)。在電機的驅(qū)動電流脈沖之間,電機線圈運動經(jīng)過電機磁場時,就會產(chǎn)生電壓。這一信息通常被稱為電機的速度和/或負荷角(SLA)。可以通過監(jiān)視反電動勢的幅度來很好地近似步進電機的角速度。
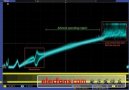
圖1給出了使用AMIS-30522細分步進電機控制器驅(qū)動安裝在機械系統(tǒng)中的傳統(tǒng)步進電機時SLA引腳的映射。這一信息是在對NXT輸入(確定電機激勵速度的時鐘輸入)進行掃頻的過程中收集的。隨著它從左向右移動,激勵的頻率升高,可以清晰地看到不同的工作區(qū)域。測量整個系統(tǒng)的電機特性的能力是AMIS-305xx系列所具有的一種非常強大的特性——特別是它能夠處理傳統(tǒng)的設(shè)計難題,而在此之前,系統(tǒng)設(shè)計人員只分析電機的共振性能,而沒有認識到一旦整個機械裝置放在一起之后這些區(qū)域可能會發(fā)生變化。

圖1 對NXT引腳掃頻的同時監(jiān)視SLA引腳
電機控制系統(tǒng)可以不斷地對SLA電壓進行采樣,如果遇到異常情況,就可以采取適當(dāng)?shù)拇胧R驗榉措妱觿菡扔谵D(zhuǎn)子的旋轉(zhuǎn)速度,所以可以方便地用于感應(yīng)輸出軸上的外部負載,并調(diào)節(jié)供應(yīng)給電機的電流。取自SLA引腳的數(shù)據(jù)大有作為的另一個領(lǐng)域是當(dāng)電機將要進入共振區(qū)域的時候。通過設(shè)計一種算法來快速地識別出這種情況,步進電機控制系統(tǒng)就可以立即加速通過這一區(qū)域,到達新的安全速度。
圖1左側(cè)的紅色方塊突出顯示了系統(tǒng)中的共振。這可能是因為電機的實際安裝,在步進臺階之間的電機共振基頻,或者其他二階因素。這些通常是需要避開的換向速度區(qū)域,如果采用安森美半導(dǎo)體的反電動勢技術(shù),可以方便地在數(shù)分鐘之內(nèi)得到映射。這將有助于減少機電系統(tǒng)的壓力。這之所以重要,是因為系統(tǒng)壓力可能會造成噪聲增大,性能下降,并可能造成系統(tǒng)可靠性降低。這種數(shù)據(jù)收集方法的亮點在于,不需要對系統(tǒng)進行物理更改就能完成映射過程。唯一的傳感器就是電機本身,所以不會額外增加機械復(fù)雜度。
圖1右側(cè)的紅色方塊表示電流驅(qū)動超出系統(tǒng)的RLC時間常數(shù)的區(qū)域,從而導(dǎo)致了電機線圈上的殘余電流。它是這種特定的機電系統(tǒng)的“速度限制”。
在這兩塊區(qū)域之間的就是推薦的電機工作區(qū)域。還應(yīng)該注意到,相同的映射還可用于識別電機無法換向(從而無法產(chǎn)生反電動勢)的失速情況。在系統(tǒng)控制器中,只需要通過配置電機激勵之間的最低閾值就能夠控制這種情況。
在設(shè)計中使用映射數(shù)據(jù)
一旦完成了映射并且知道了理想的速度曲線,就可以選擇最佳的SLA取值。對于給定系統(tǒng)而言,它將代表效率最高的工作點。可以通過動態(tài)地調(diào)節(jié)電機控制變量,如電流驅(qū)動、加速度和速度,以避免出現(xiàn)會損害效率的問題,如機械共振和過大的驅(qū)動電流。無傳感器/反電動勢方法的優(yōu)勢在于,來自傳感器的反饋不是簡單的二元信息,而是可以用于從電機獲得詳細的診斷信息,而且不會額外增加系統(tǒng)的復(fù)雜度,就又使得我們能夠使用SLA的細微變化來進行實時補償,從而避免丟步。
-
步進電機
+關(guān)注
關(guān)注
151文章
3120瀏覽量
147841
原文標(biāo)題:【技術(shù)文章】高效的步進電機控制算法
文章出處:【微信號:ChinaAET,微信公眾號:電子技術(shù)應(yīng)用ChinaAET】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
STM32如何詮釋電機控制創(chuàng)新 如何更高效更智能

BLDC電機、AC電機、步進電機的控制算法
步進電機驅(qū)動算法之梯形加減速算法

Arduino實驗16步進電機的控制





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論