 新能源整車控制器VCU開發過程詳解
新能源整車控制器VCU開發過程詳解
汽車輕量化帶動車用改性塑料需求,汽車行業已經成為改性塑料需求增速最快的領域。改性塑料下游最大的應用領域是家電和汽車,在汽車輕量化的帶動下汽車行業已經成為改性塑料需求增速最快的領域,預計未來幾年國內車用改性塑料需求年平均增速將在15%以上。
一款合適的整車控制器需要正確的輸入,一般車型不一樣整車控制器的接口需求也不一樣,因為整車控制器開發周期比較長,所以在整車控制器的研發起始階段要考慮,所研發的整車控制器要有一定的兼容性,能適應較多車型。
1、從輸入來看:需要整車設計需求+整車控制原理圖


2、整車電氣原理確定后,就確定了整車的控制方案,這時就可以確定整車控制器的接口功能:

3、整車控制接口定義確定后,內部功能也就確定
我們需用飛思卡爾16位雙核單片機Mc9s12xep100 112腳作為主處理器,將CAN通訊收發發在協處理器XGATE中,主CPU只經行與控制策略有關的處理,這樣就大大提高了控制的實時性。
原理圖如下:

PCB圖如下:
外觀如圖:
4、整車硬件部分完成后,接著進行軟件的設計,主要包括:
A、底層軟件的編寫,主要是配置時鐘、SPI、CAN、PIT、ECT、IO、interrupt等的寄存器。
B、BootLoader驅動,主要是CAN模塊和Flash模塊的配置。
C、CCP標定驅動。
D、應用程序包括:數據采集、故障診斷、工況判斷、輔機管理、通訊控制;
程序截圖:




5、整車控制器調試軟件:
5.1、通過CAN總線進行程序下載更新的BootLoader軟件,如圖:
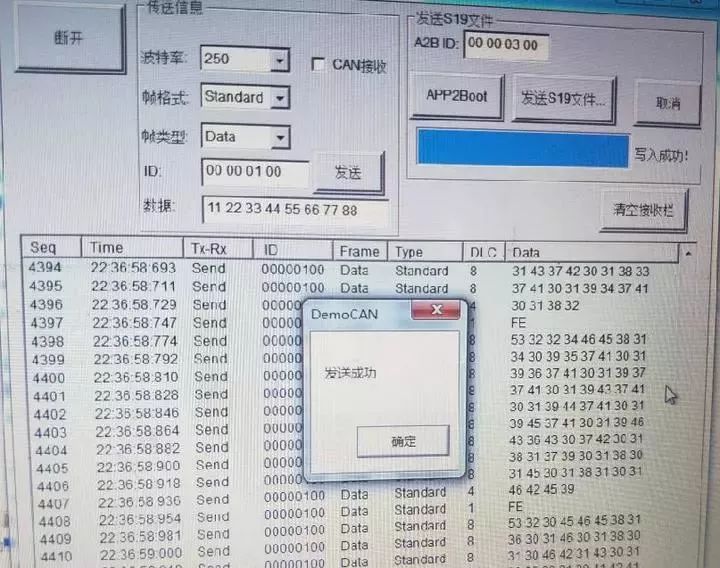
5.2、通過Busmaster監控,如圖:
在編寫控制軟件前,應制定相應的控制策略、通訊協議:
1、通訊協議:

2、CAN通訊網絡拓撲結構(此處預留燃料電池)

3、控制策略:

有了以上就可以就行控制軟件的編寫和調試的工作,調試匹配,本開發主要是針對新能源電動中巴、大巴、物流車車型,本次調試的車型為純電動考斯特,如圖:
1.調試階段:
2.試車階段:
試車視頻
整個過程經歷了1年的時間,過程中總是一個接一個的困難,記得剛開始做這個項目的時候,CAN通訊也不是很精通,急忙惡補了下,CAN底層代碼也是修改了好久,還好板子的硬件部分還算比較給力,沒出問題,在一些demo的基礎上,進行了移植和修改,很快搭建出了具有一定功能的整車控制器,同時根據項目的需要,開發了基于CAN總線下載的Bootloader。也不斷的優化換控制策略,這一塊對油門、剎車的解析是一個難點,也是廢了不少功夫。
經過以上,形成了如下開發包。
-
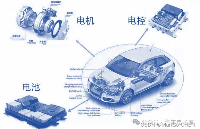
新能源汽車
+關注
關注
141文章
10623瀏覽量
100122 -
控制器
+關注
關注
112文章
16445瀏覽量
179446 -
VCU
+關注
關注
17文章
82瀏覽量
20625
原文標題:【蘇達匯誠·高工縱橫】詳解新能源整車控制器VCU開發過程
文章出處:【微信號:gh_a6b91417f850,微信公眾號:高工鋰電技術與應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
新能源汽車驅動電機控制器的工作原理
電機控制器在新能源領域的應用
新能源汽車VCU電控開發——能量回收模塊
新能源汽車控制器詳解:VCU、ECU、MCU和電池BMS
解決方案丨EasyGo新能源系統實時仿真應用
新能源汽車電機控制器(MCU)

新能源汽車之整車控制器VCU到底有什么用?


【換道賽車:新能源汽車的中國道路 | 閱讀體驗】 新能源到底新在何處?新能源在國內如何發展?
聯合電子推出面向跨域融合的新一代整車運動域控制器VCU8.6平臺

從0到1實現VCU:新能源汽車整車控制器






 工商網監
工商網監
評論