 用zigbee技術實現智能路燈控制方案推薦
用zigbee技術實現智能路燈控制方案推薦
采用時間控制、光照控制等方式控制的路燈照明系統存在著路燈使用壽命短、管理開銷大、電能浪費、無法遠程監控以及故障維修反應效率低等現象。隨著人們生活質量的提高及科學技術的進步,對城市路燈的要求越來越高,不僅要求安全、節能、維護方便,還要求其能美化夜景,彰顯城市魅力;例如上海市博園安裝的無線景觀路燈照明,為其夜晚增添了不少的色彩。
目前國內外路燈系統正朝著節能、單燈控制以及遠程監控的方向發展。本文基于無線網絡技術,設計了一套采用Zigbee 技術實現的路燈控制實訓系統; 該系統可實現路燈的遠程實時監控及數據采集存儲等功能。
2 系統硬件設計
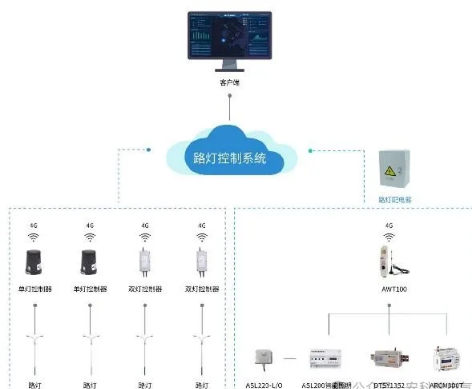
系統由安裝在路燈燈桿上的路燈節點、無線網絡及監控中心組成,結構如圖1 所示,路燈節點和監控中心需要配備無線通信模塊。
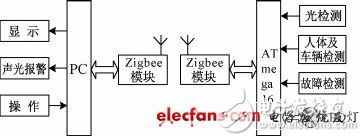
圖1 系統結構圖
2. 1 無線網絡
無線網絡采用Zigbee 技術,使路燈工作現場與系統監控中心可靠通信。這種技術主要應用在數據傳輸速率不高且短距離傳輸的各種電子設備之間,非常適合工業控制、環境監測等場合,具有低功耗、低成本和低復雜度等特點。本系統Zigbee 模塊采用CC2530 片上系統作為控制電路的核心,具有256KBFLASH,在接收和發射模式下,電流損耗分別低于25mA 和34mA.模塊電源由外部穩壓電源提供5V電壓,以確保各節點長時間穩定工作。
根據路燈系統特點,網絡采用樹形連接,以便靈活擴展節點和自組網絡。與PC 機串口RS232 連接的Zigbee 模塊為網絡協調器,起著組織、管理網絡和發號施令的作用;當網絡有節點加入時,它分配地址給新節點,因此不能掉電也沒有低功耗狀態。
與路燈單元串口連接的Zigbee 模塊為路由器,起著中繼器的作用,可以收發數據也可以轉發數據,承擔著與上位機和相鄰節點通信的任務。
2. 2 路燈節點
路燈節點由路燈控制器、電源模塊和Zigbee 模塊組成,完成現場數據及控制命令的處理、控制LED 燈開關及調光的任務。
路燈控制器選擇高性能、低功耗的8 位AVR 微處理器ATmega16 作為核心部件,該單片機輸入/輸出口可以自由設定,驅動能力強,集多種器件與多種功能于一身,大大減少了外圍器件的使用量,降低了電路的復雜程度。控制器的外圍電路包括信號檢測、亮燈驅動和故障檢測等電路。
信號檢測部分由光敏電阻電路和熱釋電紅外傳感器電路組成。光敏電阻5537 用于對環境光檢測,從而控制燈光的亮度;熱釋電紅外傳感器DYPME003感應距離0 ~ 7 米可調,用于判斷是否有行人或者車輛通過,并根據設定值調節燈光亮度。
考慮到LED 路燈高效節能及其應用日趨廣泛,采用LED 作為光源,并采用XN2115 芯片驅動。系統選用1W、3. 2 ~ 3. 6V 的LED 燈4 顆。路燈故障檢測信號取自XN2115 芯片的SW 點的電壓,將該點電壓通過大電容平波后與電壓比較器的基準電壓進行比較,比較結果的高低電平送入單片機處理,并將故障信息送至上位機實現故障報警、位置顯示等功能。
路燈節點使用了5V 及12V 的直流電。將220V交流電通過整流橋KBP210 變為12V 直流電,為LED 驅動電路和故障檢測電路提供電源,功率可達40W; 12V 直流電源再通過LM2596-5. 0 集成三端穩壓器輸出5V 直流電源,輸出電流最大可達3A,具有很好的線性和負載調節特性,為Zigbee 模塊、單片機及其他外圍電路提供電源。
2. 3 監控中心
監控中心由PC 機和Zigbee 模塊組成,提供系統信息,具有遙測、遙控及存儲和管理數據功能的人機界面顯示,可以對整個路燈系統進行工作狀況的實時監控。
PC 機可以通過無線通信網絡采集路燈狀態,例如環境光強度、用電量、亮燈率等,并可向路燈節點發送控制命令,路燈節點根據這些命令對LED 燈進行操作,實現系統的按需控制及每盞路燈的實時監控。
3 系統軟件設計
系統上電后進行初始化,檢測系統是否正常工作,如果正常則按照路燈控制界面進行路燈狀態檢測或者對路燈進行輸出控制,使路燈按照既定程序實現開/關狀態,并經由Zigbee 網絡實時顯示信息。
監控界面可選擇各Zigbee 模塊的網絡節點號,搜索網絡內的各個模塊,將控制命令發送至指定的路燈節點,也可實時顯示路燈狀態信息和底層數據包。
3. 1 現場信號采集、檢測與處理程序
路燈現場環境光采集模塊經由光敏電阻得到電壓值,并通過ATmage16 內部的1 路10 位ADC 模數轉化電路將其轉化為數字信號。為了平滑采樣信號,提高系統抗干擾能力,設計中采用了數字濾波方式,每次轉換完閉后,ATmage16 會自動產生中斷信號,將本次和前8 次數據取平均值送給單片機處理。
當有人經過時熱釋電紅外傳感器會輸出高電平,經過后續處理電路,單片機得到一個低電平。為了避免重復觸發,人體檢測中斷觸發方式采用下降沿方式。
路燈的調光是通過給XN2115 芯片的DIM 引腳端上施加PWM 信號來實現。ATmage16 內部自帶四通道的PWM,設置為快速PWM 模式、OC2 復位、32 分頻。當OCR2 的值從0 到256 變化時,LED 燈從全亮到全滅。
3. 2 通信程序設計
系統通信程序包括路燈與路燈節點之間的通信及其路燈節點與監控中心之間的通信兩部分。
1) 路燈節點之間的通信實現。
路燈節點之間實現通信,一方面是為了了保證路燈在夜間沒有行人或車輛通過時處于節電狀態,即微亮狀態,另一方面是當路燈節點檢測到道路上有行人或車輛通過時,使該路燈轉為全亮,并通知下一盞路燈轉為全亮,以確保行人或車輛的出行安全。
路燈節點之間采用串口通信,通信參數配置為異步通信、8 位數據、無奇偶校驗、一個停止位及無倍速。串口的發送程序采用查詢方式,接收程序采用中斷接收方式。
路燈節點控制器之間的發送程序為:
sysDRFarr [0] = 0xfd; / /點對點數據傳輸指令
sysDRFarr [1] = 1; / /數據長度
sysDRFarr [2] = sysAddress [( LEDNumber )* 11 + 1]; / /目標地址高
sysDRFarr [3] = sysAddress [( LEDNumber )* 11 + 2]; / /目標地址低
sysDRFarr [4] = 0; / /數據
put_ arr ( sysDRFarr,5) ; / /發送一串數據幀
接收處理程序為:
void PointToPointRecive ( void)
{
LEDPWM_ Adjust ( usartReceiveBuf [3 ]) ;
/ /接收到的數據
sysDRFarrShortAddress [0] = usartReceiveBuf[4]; / /來源地址高
sysDRFarrShortAddress [1] = usartReceiveBuf[5]; / /來源地址低
usartReceive_ Init ( ) ; / /串口數據初始化
}
2) 路燈節點與監控中心之間的通信。
路燈節點與監控中心之間的通信一方面可以通過上位機為路燈節點配置相關信息、發送控制指令,另一方面可以接收來自路燈節點的現場運行信息,實現系統在監控室進行路燈系統操控和故障查詢、報警等功能。
采用PC 機串口與網絡協調器相連,實現讀取路燈節點信息或控制路燈運行狀態。例如PC 機要讀取當前系統路燈信息,利用串口調試工具觀察PC機向無線網絡發送和接收數據,如圖2 所示。發送指令格式為: FB + 02 + 14 + 路燈編號( 本系統中路燈編號為01,02,03),表示讀取編號為01、02、03 的路燈節點當前信息;路燈節點做出回應,通過無線網絡返回路燈信息格式為: 環境光強+ 路燈光強+ 故障情況。路燈節點1 返回的信息表明當前所處環境光強度為E2(由強到弱范圍: FE ~ 00)、路燈亮度FB ( 由滅到全亮范圍:FE ~ 00) 、無故障00( 有故障為01) 。
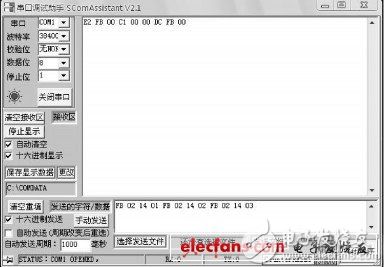
圖2 串口調試界面
3. 3 監控軟件功能設計
系統監控中心程序包括: 顯示監控程序、調試配置程序、系統參數配置程序及存儲工作運行數據程序。
(1) 顯示監控程序。
顯示監控程序包括路燈狀態信息、街道狀態信息、報警信息。通過顯示監控界面可以實現街道選擇; 觀察路燈當前光通量、功耗、工作時長及是否故障; 自動統計該街道的總用電量、亮燈率;系統自動工作的時間段; 顯示當前街道故障的路燈編號及該路燈在什么時間發生故障。
(2) 調試配置程序。
調試配置程序包括串口配置、Zigbee 讀取及配置、路燈調試。通過串口配置界面設置相應的串口配置參數;通過Zigbee 的配置程序可讀取Zigbee 模塊的網絡ID 號、波特率、網絡地址、MAC 地址,可以方便的設置Zigbee 模塊的網絡ID 號、波特率;通過路燈調試界面可以讀取該街道路燈的環境光強、路燈光強、功耗、是否故障等信息。可以對該路燈進行調光測試及設置該路燈開始工作時間。
(3) 系統參數配置程序。
系統參數配置程序包括校正路燈節點時間、設置系統工作時間、配置街道地址。在系統運行過程中,系統時間可能會與當前時間有差別,通過系統時間校正,可以使系統時間與PC 機時間同步; 可以設置系統正常工作的開關機時間與街道地址。
(4) 存儲工作運行數據。
在系統運行的過程中,下位機發送的路燈信息及報警信息都會保存到數據庫中。同時街道及路燈的配置信息也保存在數據庫中,并可方便用戶導出及打印信息。
4 系統功能測試
4. 1 系統測試
由于Zigbee 網絡能自組網,因此在構造試驗系統時我們配置了最小系統: 1 個網絡協調器節點和3個路由器節點,系統采用主從方式,一般處于休眠狀態,當有中斷請求時激活節點進行工作。路燈高度為0. 7m,路燈間隔為0. 8m,現場路燈系統如圖3、圖4 所示。
圖3 路燈1 微亮,2、3 全亮
圖4 路燈1,2 微亮,路燈3 全亮。
圖3 為小車運行到路燈2 位置的狀態。路燈2全亮,并通知路燈1 轉為微亮、前方路燈3 轉為全亮。若1 號節點熱釋電紅外傳感器檢測不到信號并收到了前方路燈的信息,則狀態轉為微亮; 當小車向前運行進入3 號節點熱釋電紅外傳感范圍時,3號燈通知2 號燈轉為微量,如圖4 所示,對應的監控界面如圖5 所示。監控界面中淡黃色路燈表示路燈微亮、深黃色路燈表示路燈全亮。
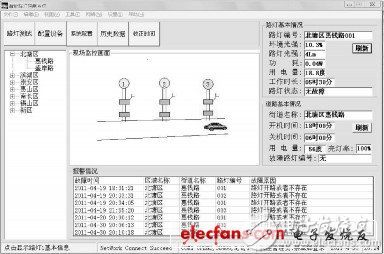
圖5 監控界面。
運行路燈控制系統軟件時需要進行系統配置、通信配置、Zigbee 配置等操作; 在運行中可對路燈節點進行調光、校正時間等操作。如圖6 為系統工作時間設置,圖7 為路燈節點時間校正。
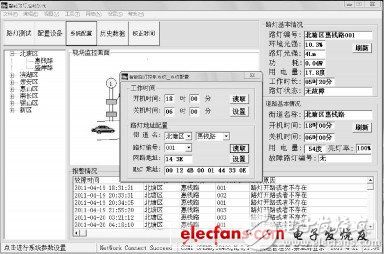
圖6 系統工作時間設置。
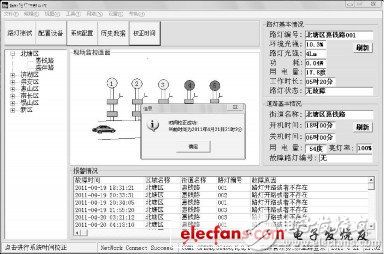
圖7 系統校正時間。
4. 2 系統功能
路燈控制方式可分為手動控制方式和自動控制方式,均可在監控中心操作或進行參數設置。系統可實現以下功能:
1) 可進行單燈遠程監控,并可調節燈具亮度。
2) 可根據環境光自動開關路燈,并可調整燈具亮度,保證使用需要。
3) 根據道路是否有行人/車輛通過實現亮度漸變。路燈夜間無行人/車輛通過,路燈微亮; 當檢測到遠方有行人/車輛接近時,路燈由微亮轉為全亮,并通知前方路燈由微量轉為全亮;車輛/行人通過后,路燈又轉為微亮。
4) 具有路燈故障檢測功能。當有路燈損壞,可以進行聲光報警,并指示故障路燈的具體位置。
5) 具有數據統計和存儲功能。可提供路燈用電量、亮燈率和功耗等數據,并可查詢歷史記錄。
6) 系統具有休眠狀態,降低系統功耗。
5 結束語
智能化和網絡化控制路燈是未來路燈控制的發展方向和必然趨勢。隨著技術的進步和城市發展的需求,無線傳感節點集成度會越來越高,價格會越來越低,路燈控制系統的功能會越來越多,路燈的自動化管理和無線通信技術的結合應用也必然會越來越廣泛。
本系統采用Zigbee 協議實現了路燈控制模擬系統的實時監控和網絡化管理。系統網絡擴展靈活、現場易于安裝,操作界面友好、管理方便。本系統已用于自動化類專業的大學生實驗實訓教學,有助于學生了解無線通信、傳感技術、單片機技術及其在城市路燈控制系統中的應用。
發布評論請先 登錄
相關推薦
智能路燈遠程控制系統功能特點與應用



智能路燈遠程控制系統
智慧路燈 路燈安全控制系統的解決方案

路燈單燈控制器??智慧路燈桿智能照明新寵






 工商網監
工商網監
評論