") 微觀世界里的特種兵藻類細(xì)胞機(jī)器人
微觀世界里的特種兵藻類細(xì)胞機(jī)器人
現(xiàn)實(shí)世界中,在微觀領(lǐng)域進(jìn)行探索和操作需要一類小的機(jī)器人作為幫手,它們的尺寸要小到能夠在微米甚至是納米尺度執(zhí)行特定任務(wù),這就是微型機(jī)器人。微型機(jī)器人由于個(gè)體太小,在研制過程中主要面臨3個(gè)方面挑戰(zhàn):能源、驅(qū)動(dòng)和控制。針對(duì)這些問題,國內(nèi)外已開展了幾類微型機(jī)器人的研究,包括磁驅(qū)動(dòng)微型機(jī)器人、光驅(qū)動(dòng)微型機(jī)器人、熱驅(qū)動(dòng)機(jī)器人、化學(xué)氣泡推動(dòng)機(jī)器人、微生物機(jī)器人等。藻類細(xì)胞機(jī)器人是這些機(jī)器人中的一種。
藻類細(xì)胞尺寸通常為幾微米至幾十微米,具有眼點(diǎn)和鞭毛,能夠從周圍液體環(huán)境中獲取能量驅(qū)動(dòng)自身向前游動(dòng)。它們的游動(dòng)速度可達(dá)110 μm/s,即每秒運(yùn)動(dòng)距離是其自身體長的3~10倍。在它身體前端的“眼點(diǎn)”,能夠感知特定波長光線的刺激,并迅速做出響應(yīng),這就是它的趨光性。藻類細(xì)胞得天獨(dú)厚的優(yōu)勢(shì)自然而然地解決了微型機(jī)器人面臨的供能和驅(qū)動(dòng)問題。
藻類細(xì)胞在水中是任意游動(dòng)的,如何實(shí)現(xiàn)其機(jī)器人化運(yùn)動(dòng)及向外界做功是生物學(xué)與機(jī)器人學(xué)交叉領(lǐng)域的難點(diǎn)問題。2005年,Weibel等首次報(bào)道了利用衣藻細(xì)胞趨光性控制細(xì)胞在微流控管道內(nèi)往復(fù)運(yùn)動(dòng),并通過衣藻細(xì)胞帶動(dòng)直徑1~6 μm的聚苯乙烯小球運(yùn)動(dòng),但該研究中衣藻細(xì)胞是在一段直管道內(nèi)往復(fù)運(yùn)動(dòng)。為了控制藻類細(xì)胞進(jìn)行更復(fù)雜的運(yùn)動(dòng),中國科學(xué)院沈陽自動(dòng)化研究所微納米課題組開發(fā)了藻類細(xì)胞引導(dǎo)系統(tǒng)(Algae Guiding System, AGS)。通過該系統(tǒng)可以控制藻類細(xì)胞定向運(yùn)動(dòng),使其依次通過十字形微流控管道,遍歷4條管道后又回到出發(fā)點(diǎn),如圖1所示。通過合理規(guī)劃AGS光源的運(yùn)動(dòng),可實(shí)現(xiàn)藻類細(xì)胞機(jī)器人在二維空間沿任意設(shè)定路徑的運(yùn)動(dòng),包括沿三角形、長方形、方波形等路徑運(yùn)動(dòng)。
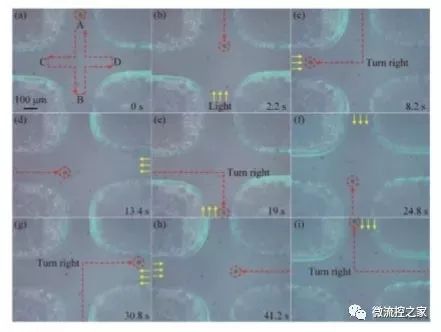
圖1 藻類細(xì)胞機(jī)器人在微流控管道十字路口“右轉(zhuǎn)”運(yùn)動(dòng)
在控制藻類細(xì)胞機(jī)器人定向運(yùn)動(dòng)的基礎(chǔ)上,通過對(duì)機(jī)器人的群體控制,研究人員又成功實(shí)現(xiàn)了對(duì)微小物體的準(zhǔn)確抓取、可控輸運(yùn)和精準(zhǔn)釋放。通過照射光斑可以控制藻類細(xì)胞機(jī)器人聚集到直徑 100 μm顆粒周圍,在移動(dòng)光斑時(shí)藻類細(xì)胞群體可推動(dòng)顆粒隨著光斑而運(yùn)動(dòng),關(guān)閉光斑即實(shí)現(xiàn)了顆粒的釋放。
除了控制藻類細(xì)胞機(jī)器人定向運(yùn)動(dòng),研究人員進(jìn)一步實(shí)現(xiàn)了藻類細(xì)胞機(jī)器人的陣列化旋轉(zhuǎn)。結(jié)合光誘導(dǎo)介電泳技術(shù)(ODEP),建立了藻類細(xì)胞在ODEP微環(huán)境中的轉(zhuǎn)動(dòng)狀態(tài)模型和受力模型,實(shí)現(xiàn)了對(duì)藻類細(xì)胞的快速捕獲及陣列化旋轉(zhuǎn),且通過改變光強(qiáng)可有效調(diào)節(jié)細(xì)胞旋轉(zhuǎn)速度,如圖2。構(gòu)建的藻類細(xì)胞旋轉(zhuǎn)陣列有望作為微尺度馬達(dá)陣列,在微流控及生物驅(qū)動(dòng)領(lǐng)域發(fā)揮重要作用。
圖2 藻類細(xì)胞定向旋轉(zhuǎn)陣列
藻類細(xì)胞作為微型機(jī)器人,解決了以往微型機(jī)器人在能源、驅(qū)動(dòng)、控制方面遇到的問題。通過對(duì)藻類細(xì)胞機(jī)器人進(jìn)行控制,研究人員實(shí)現(xiàn)了藻類細(xì)胞機(jī)器人的定向運(yùn)動(dòng)、旋轉(zhuǎn)及對(duì)微結(jié)構(gòu)的輸運(yùn)。藻類細(xì)胞機(jī)器人作為一種新型微型機(jī)器人,是微觀世界里的特種兵,它們將在生物驅(qū)動(dòng)、藥物輸運(yùn)、環(huán)境監(jiān)測(cè)和微納制造等方面為人類做出貢獻(xiàn)。
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28646瀏覽量
208439
原文標(biāo)題:藻類細(xì)胞機(jī)器人,微觀世界里的特種兵
文章出處:【微信號(hào):wwzhifudianhua,微信公眾號(hào):MEMS技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
EBSD:材料微觀世界的“顯微鏡”
奇瑞汽車1億元成立機(jī)器人科技公司
不同類型機(jī)器人及其所需的滑環(huán)種類
INDEMIND助力TCL打造世界首款分體式陪伴機(jī)器人 Ai Me

【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】1.初步理解具身智能
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+數(shù)據(jù)在具身人工智能中的價(jià)值
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+初品的體驗(yàn)
《具身智能機(jī)器人系統(tǒng)》第1-6章閱讀心得之具身智能機(jī)器人系統(tǒng)背景知識(shí)與基礎(chǔ)模塊
大象機(jī)器人11月大事件回顧
鴻蒙機(jī)器人與鴻蒙開發(fā)板聯(lián)動(dòng)演示
軟通動(dòng)力與智元機(jī)器人攜手亮相世界機(jī)器人大會(huì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論