 UWB 3D 定位算法與上位機方案
UWB 3D 定位算法與上位機方案
基于恩智浦S32K144、NCJ29D5D與KW38的UWB 3D定位方案,提供了更高的定位精度和強大的防中繼能力。該方案通過雙邊雙距測距方式,實現鑰匙在三維空間中的精確定位。
一、UWB 3D DEMO 介紹
1.1 概述
世平基于恩智浦 S32K144、NCJ2 9D5D 與KW38的 UWB 3D 定位方案,該方案遵循 3C 協議,UWB 具備更高的定位精度,以及更強的防中繼能力。
UWB DEMO 利用雙邊雙距測距方式對鑰匙進行測距,距離數據傳輸至 BCM 處理,結合 3D 算法計算出鑰匙在三維空間上的坐標。
測試 UWB 定位效果,鑰匙在 DEMO 基站內部,鑰匙環繞 DEMO 基站外部。
1.2 UWB 3D DEMO
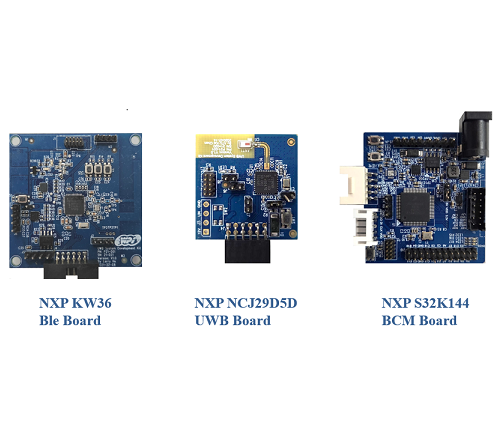
UWB System Development Kit 是用 S32K144 評估板、NCJ29D5D 評估板和 KW38 評估板搭配而成的 UWB 測距定位評估套件。這三個板子相互搭配之后形成了 UWB 錨點、 BCM、 BLE 錨點和 Keyfob,通過 Keyfob 與 UWB 錨點的通信測距,匯總到 BCM 之后進行計算。
1.3 UWB 3D 定位算法概述
在獲取四個錨點到鑰匙的距離之后,就可以計算鑰匙的位置,計算鑰匙使用的是最小二乘法的方式,找出方差和最小的解。
二、UWB 3D 上位機介紹
2.1 概述
UWB 3D 上位機基于 Python 與 QT GUI 開發,通過 UART 通信方式實現板與 PC 間傳輸數據,上位機實現三維界面中實時顯示 UWB 鑰匙坐標、設置有迎賓區、解鎖區,通過動畫演示車門解鎖等應用場景。
2.2 3D 顯示功能介紹
3D 界面區主要功能是將鑰匙、汽車模型、迎賓區、解鎖區顯示在三維空間中以及三維效果的演示,界面包含 3D 顯示界面、鑰匙實時坐標、3D 顯示界面視角控制按鍵。
2.3 上位機狀態功能介紹
功能狀態區主要功能是顯示目前功能的狀態,包含功能狀態圖標如連接設備、鑰匙進入迎賓區、鑰匙進入解鎖區,都會觸發對應狀態圖標的激活。
2.4 上位機配置功能介紹
上位機配置區主要功能是配置上位機與 UWB BCM 通信包含:
串口配置 - 用于配置串口通信波特率、數據位、校驗位、停止位等通信參數;
UWB 錨點坐標設置 - 用于錨定五個參考錨點在空間中的坐標;
濾波數據數量控制 - 用于配置參與濾波數據的數量;
迎賓區解鎖區范圍 - 用于控制 3D 界面中迎賓區、解鎖區的范圍;
運行日志 - 用于打印上位機運行中的狀態、LOG;
?展示板照片
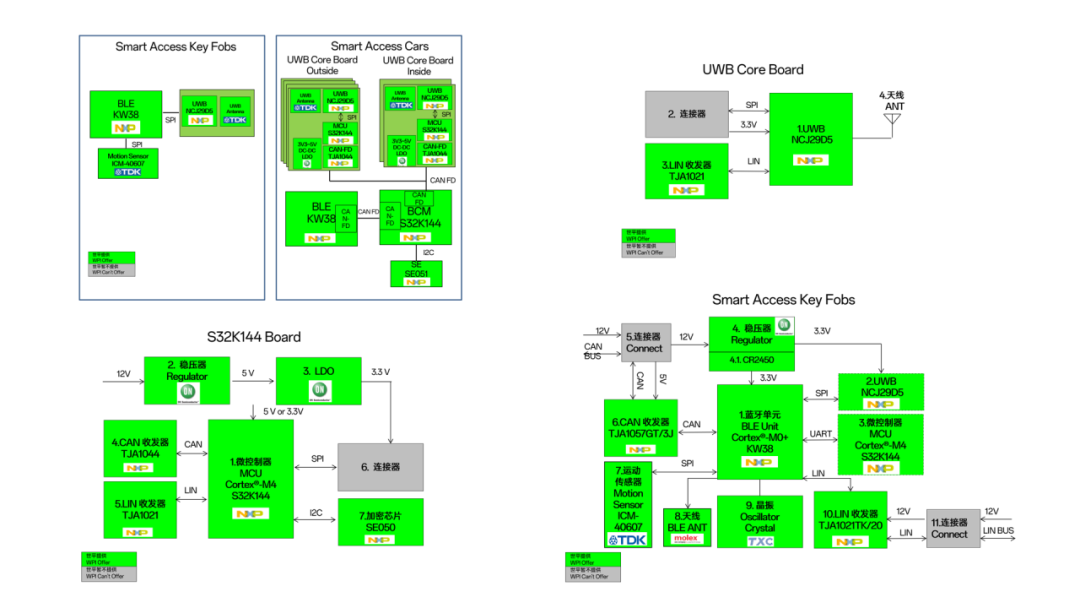
?方案方塊圖
?核心技術優勢
? 基于 Python 與 QT GUI 上位機顯示界面
? 配置與 UWB BCM 串口通信功能
? 上位機狀圖標態、實時數據顯示功能
? 3D 汽車模型、車門動畫、迎賓區與解鎖區范圍功能
? UWB 鑰匙坐標數據可視化
? 三維界面視角可自由控制
? 鑰匙坐標數據濾波
? 工程多線程運行
?方案規格
UWB 3D 定位算法功能 :
? BCM 與 PC 上位機、板載上位機 UART 通信功能
? BCM 通過 UWB 3D 定位算法對測量值進行濾波處理
? BCM 通過 UWB 3D 定位算法計算目標鑰匙三維坐標功能
UWB 3D 定位算法精度 :
? 應用環境:四錨點搭建 X 軸 3.6m、Y 軸 1.8m、Z 軸 40cm 的環境,四錨點坐標為 ( 90, 180, 0 )、 ( -90, -180, 0 )、 ( -90, 180, 20 )、 ( 90, -180, -20 )
? 測量范圍:鑰匙與錨點間角度大于 10°、測量距離 5m 內
? 定位精度:±20cm(應用環境下測量范圍內)
上位機 PC 端界面功能:
? 三維界面,三維空間中顯示錨點、目標鑰匙的空間坐標、迎賓區、解鎖區、車門解鎖等應用動畫。
? 配置界面,配置錨點、串口連接等參數信息、UART 通信功能,上位機通過 UART 接收從 BCM 數據幀。
? 信息窗口,顯示上位機運行狀態、數據信息的窗口。
登錄大大通網站,了解更多詳情,提問/評論,獲取方案技術文檔等更多資訊!
-
NXP
+關注
關注
60文章
1289瀏覽量
185472 -
UWB
+關注
關注
32文章
1109瀏覽量
61383 -
車身電子
+關注
關注
1文章
13瀏覽量
9769 -
3D定位
+關注
關注
0文章
4瀏覽量
7416 -
S32k144
+關注
關注
1文章
9瀏覽量
1933
發布評論請先 登錄
相關推薦
基于 NXP RT1052 的 Klipper 3D 打印機下位機方案

SciChart 3D for WPF圖表庫

UWB定位系統在智能制造行業中的功能特點

煤礦人員定位系統——基于UWB技術帶電子圍欄功能
奧比中光3D相機打造高質量、低成本的3D動作捕捉與3D動畫內容生成方案
UWB人員定位系統的定位原理
基于java+單體服務 +?硬件(UWB定位基站、卡牌)技術架構開發的UWB室內定位系統源碼

我用香橙派做了一個Klipper 3D打印控制器
3D視覺引導方案解決工廠產線上下料難題
隧道UWB高精度定位系統

解決方案|基于3D視覺技術的鋁合金板件刷油烘干自動化上下料
隧道人員定位系統UWB定位厘米級精度助力隧道安全






 工商網監
工商網監
評論