 虹科免拆案例 | 2015款奔馳R320車行駛中偶爾多個故障燈異常點亮
虹科免拆案例 | 2015款奔馳R320車行駛中偶爾多個故障燈異常點亮
一輛2015款奔馳R320車,搭載276 826 發動機,累計行駛里程約為18萬km。該車行駛中,組合儀表上的ABS警告燈、防側滑警告燈、發動機故障燈等多個故障燈偶爾異常點亮(圖1),且車速表不指示,擋位不顯示,同時車輛加速不良;另外,發動機偶爾無法起動著機。

圖1故障時的組合儀表
用故障檢測儀檢測,發現多個控制單元中均存儲有未曾接收到其他控制單元的CAN信息的故障代碼;梳理這些故障代碼,發現曾丟失通信的控制單元有轉向柱控制單元(N80)、車身穩定系統控制單元(N47-5)、發動機控制單元(N3/10)、直接選擇智能伺服控制單元(A80)、中央通道控制單元(N93)、變速器控制單元(EGS)及組合儀表(A1)等,而這些控制模塊均在CAN C總線(底盤CAN總線)上,由此懷疑CAN C 總線偶爾存在通信故障。
查看維修資料得知,CAN C總線上的控制單元均連接在副駕駛人側的CAN C總線分配器X30/19(圖2)上,于是用虹科Pico汽車示波器從CAN C總線分配器X30/19處測量CAN C總線信號波形。

圖2CAN C總線分配器X30/19的位置
反復試車,捕捉到故障出現時的CAN C總線信號波形如圖3所示,CAN C-H隱性電壓約為2.5 V,顯性電壓約為3.5 V,正常;CAN C-L隱性電壓約為2.5 V,顯性電壓約為1.4 V,也正常;但偶爾會出現一段比較稀疏的信號,異常。
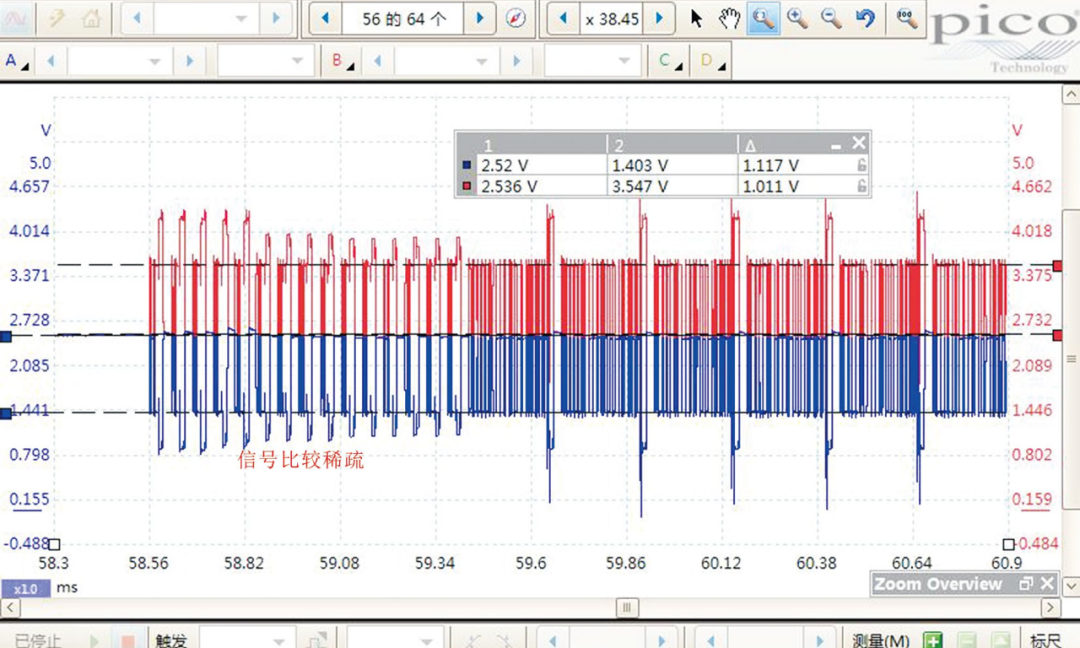
圖3故障出現時的CAN C總線信號波形
對信號波形進行譯碼(圖4),發現那段稀疏的信號無法譯碼,且幀ID3 40 在反復發送相同信號。由于CAN C總線信號的隱性電壓和顯性電壓均正常,排除CAN C總線線路存在故障(虛接、斷路、互短、對電源及搭鐵短路等)的可能,推斷某個控制單元損壞。
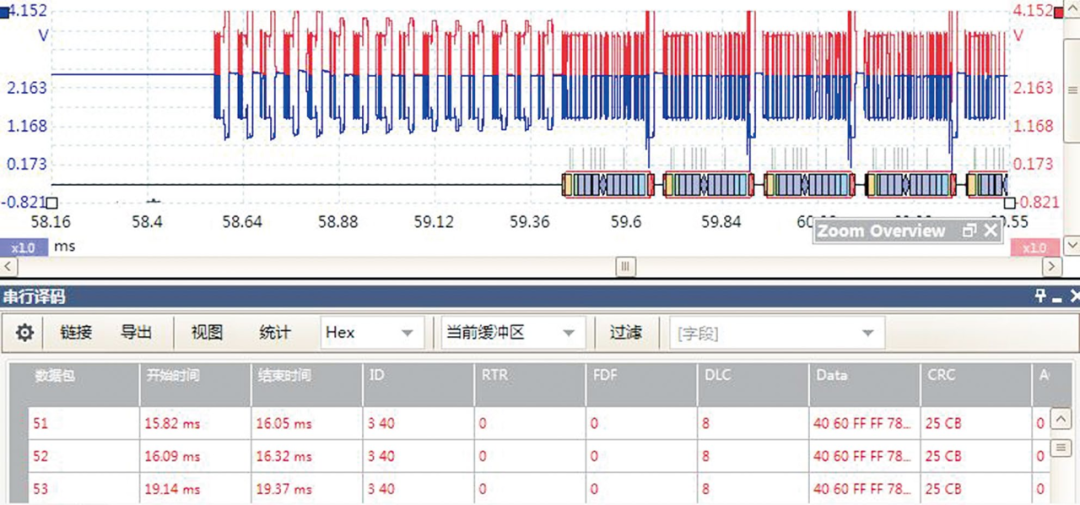
圖4對故障出現時的CAN C總線信號波形進行譯碼
依次從CAN C總線分配器X30/19處脫開通往各控制單元的CAN C總線導線連接器,發現當脫開通往左前、右前氙氣前照燈控制單元的CAN C總線導線連接器時,CAN C總線信號波形恢復正常(圖5)。
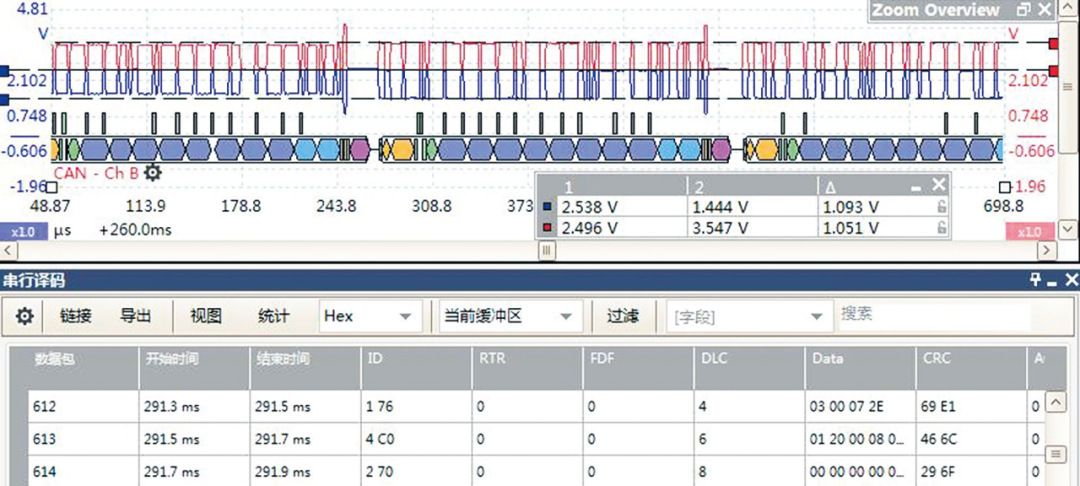
圖5CAN C總線信號波形恢復正常
進一步檢查發現,脫開右前氙氣前照燈控制單元導線連接器時,CAN C總線信號波形恢復正常,由此推斷右前氙氣前照燈控制單元損壞(圖6)。

圖6損壞的右前氙氣前照燈控制單元
更換右前氙氣前照燈控制單元后反復試車,故障未再出現,故障排除。
故障總結
萬用表測量的是平均電壓,若用萬用表測量CAN C總線信號電壓,故障時和正常時的信號電壓基本一致(CAN C-H電壓約為2.9 V,CAN C-L電壓約為2.1 V),則無法發現異常。
而示波器測量的是瞬時電壓,因此使用示波器能夠捕捉到異常的信號波形,為進一步診斷指明了方向。
與此同時,電壓正常也無法代表信號正常,需通過譯碼的方式,從通訊層面進行更精準的診斷。例如本案中,通過對信號的譯碼,才發現了幀ID3 40重新發送相同的的信號,進而通過插拔導線連接器&持續觀察譯碼的方法確定了最終故障。
-
汽車電子
+關注
關注
3029文章
8027瀏覽量
167822 -
奔馳
+關注
關注
1文章
414瀏覽量
23349 -
虹科電子
+關注
關注
0文章
615瀏覽量
14420
發布評論請先 登錄
相關推薦

虹科免拆診斷 | 2015款奔馳C200 4MATIC車發動機偶爾無法起動

虹科免拆診斷 | 2019 款起亞福瑞迪車發動機故障燈偶爾異常點亮

虹科免拆診斷 | 2020 款豐田雷凌車組合儀表上多個故障燈偶發點亮
2017款奔馳GLS450車發動機故障燈異常點亮

虹科免拆診斷 | 2020款奔馳G350車行駛中急加速時發動機抖動
虹科免拆診斷 | 2013款寶馬116i車偶爾加速不良
虹科免拆診斷 | 2022款大眾捷達VS5車行駛中擋位偶爾會鎖在D3擋
虹科免拆案例 | 2007 款法拉利 599 GTB 車發動機故障燈異常點亮





 工商網監
工商網監
評論