") 基于MEMS傳感器的行人航位推算(PDR)解決方案
基于MEMS傳感器的行人航位推算(PDR)解決方案
前言定位是感知應(yīng)用的一個(gè)重要屬性。在室內(nèi)環(huán)境中,如果位置信息可用并非常可靠,有更多的應(yīng)用場景可以實(shí)現(xiàn)的。行人航位推算(PDR) 就是這樣一種技術(shù),在室內(nèi)環(huán)境中可提供行人航位信息并提高定位可靠性。慣性傳感器、磁力計(jì)和壓力傳感器是航位推算應(yīng)用中必不可少的傳感器組件,用之可大幅提升導(dǎo)航性能,這些器件的功耗必須極低,這樣才能始終保持開啟模式并提供數(shù)據(jù)用于航位推算應(yīng)用。實(shí)現(xiàn)隨時(shí)隨地定位的目標(biāo)離不開高品質(zhì)的MEMS傳感器和高性能的行人航位推算算法。本文主要討論各種行人航位推算算法上需要用到的傳感器組件的數(shù)學(xué)表述,以及可用性和可靠性更高的PDR行人航位推算算法的測(cè)試結(jié)果。定位技術(shù)概述全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)接收器已成為室外導(dǎo)航解決方案的常用電子元器件,今天幾乎每一臺(tái)智能手機(jī)內(nèi)部都有一個(gè)這樣的衛(wèi)星接收器芯片,可實(shí)現(xiàn)各種與位置相關(guān)的移動(dòng)服務(wù),其中包括導(dǎo)航、興趣點(diǎn)搜索和地圖。
用戶開始期待他們的設(shè)備在所有環(huán)境中都能提供位置信息,但是他們通常忽略衛(wèi)星信號(hào)是不能穿透商廈和候機(jī)樓的墻壁和屋頂這個(gè)事實(shí)。建筑材料會(huì)使全球?qū)Ш叫l(wèi)星系統(tǒng)信號(hào)衰減變?nèi)酰词垢哽`敏度接收器也無法在室內(nèi)收到定位信息。目前業(yè)內(nèi)正在開發(fā)不同的行人航位推算解決方案,大都采用無線發(fā)射器充當(dāng)信標(biāo),利用三角測(cè)量法計(jì)算接收器的位置。這些解決方案利用室內(nèi)環(huán)境中的Wi-Fi接入點(diǎn)(AP)定位。類似的解決方案還包括使用藍(lán)牙發(fā)射器、GSM和其它手機(jī)發(fā)射器或?qū)S眯艠?biāo),例如Nextnavfor室內(nèi)定位設(shè)備。這些技術(shù)整合運(yùn)用服務(wù)器等基礎(chǔ)設(shè)施傳送的輔助GPS/GLONASS數(shù)據(jù)、星歷擴(kuò)展數(shù)據(jù)和Wi-Fi接入點(diǎn)(AP)位置數(shù)據(jù)。此外,還有一種使用MEMS傳感器(加速度計(jì)、磁力計(jì)、陀螺儀和高度計(jì))計(jì)算位置數(shù)據(jù)的室內(nèi)導(dǎo)航技術(shù)。今天幾乎所有的智能手機(jī)、平板電腦、數(shù)碼相機(jī)、健身產(chǎn)品等便攜消費(fèi)電子產(chǎn)品都配有MEMS傳感器。
這些傳感器配合行人航位推算(PDR) 技術(shù)能夠確定用戶位置。每項(xiàng)室內(nèi)定位技術(shù)都有其長處和短板。數(shù)據(jù)整合按照定位精度和功耗要求,微控制器整合處理各類信息源送來的信息,然后將具有不確定性的單一位置值提供給應(yīng)用。使用信任參數(shù)、相關(guān)參數(shù)和過去測(cè)量數(shù)據(jù)推算每個(gè)位置,權(quán)衡Wi-Fi、藍(lán)牙、行人航位推算和全球?qū)Ш叫l(wèi)星系統(tǒng)等多個(gè)技術(shù)送來的信息,數(shù)據(jù)整合算法在其中發(fā)揮著關(guān)鍵作用。在室外,全球?qū)Ш叫l(wèi)星系統(tǒng)接收器送來的位置信息精度良好,不確定性低。當(dāng)控制器使用的測(cè)量數(shù)據(jù)是來自用戶附近的Wi-Fi接入點(diǎn)時(shí),位置計(jì)算信號(hào)強(qiáng)度高,Wi-Fi系統(tǒng)送來的位置估測(cè)數(shù)據(jù)精度也就比較高(相關(guān)不確定性低)。
不過,Wi-Fi接入點(diǎn)數(shù)據(jù)庫(包含Wi-Fi接入點(diǎn)位置數(shù)據(jù)及其不確定性數(shù)據(jù))的品質(zhì)也會(huì)影響定位精度。PDR行人航位推算不依賴任何外力協(xié)助,無需任何外部基礎(chǔ)設(shè)施配合,就能產(chǎn)生精確的相對(duì)位置定位信息。因此,其特點(diǎn)與絕對(duì)定位技術(shù)優(yōu)勢(shì)互補(bǔ),例如,全球?qū)Ш叫l(wèi)星系統(tǒng)或基于Wi-Fi的導(dǎo)航系統(tǒng)。因此,PDR行人航位推算適用于混合系統(tǒng),可以在室內(nèi)環(huán)境確定用戶位置,定位的精確度、可用性和可靠性更高。
行人航位推算移動(dòng)設(shè)備中的MEMS傳感器因受到數(shù)據(jù)漂移和噪聲的影響,會(huì)引起基于積分運(yùn)算方法的傳統(tǒng)慣性導(dǎo)航系統(tǒng)出現(xiàn)難以處理的位移和姿態(tài)誤差。在行人航位推算應(yīng)用中,傳統(tǒng)積分運(yùn)算導(dǎo)航方法效果不理想,因?yàn)榕c人體運(yùn)動(dòng)相關(guān)的復(fù)雜動(dòng)力學(xué)很難建模,將其用于運(yùn)算有不小的難度。
在過去十年中,業(yè)內(nèi)主要開發(fā)出兩種很有前景的室內(nèi)環(huán)境行人導(dǎo)航方法,一種在參考文獻(xiàn)[1]論述的基于零速率更新的INS-EKF-ZUPT (IEZ)慣導(dǎo)方法,另一種是包括步伐檢測(cè)、步長估算和航向算法的基于人類步行動(dòng)力學(xué)的慣導(dǎo)方法。基于零速率更新的(ZUPT)的方法基于一個(gè)假設(shè)和一個(gè)物理現(xiàn)象,即假設(shè)慣性傳感器是安裝在腳上,且每邁出一步后都是暫時(shí)靜止?fàn)顟B(tài)。本文主要討論通用性更強(qiáng)的方法。從通用導(dǎo)航方程式[2]可以推出行人航位推算過程的數(shù)學(xué)表述。在進(jìn)行兩次積分運(yùn)算后,平臺(tái)加速度變成了北東坐標(biāo)系的位置,可以寫為:
方程式1
其中,(t)是位移,(t)是航向。在行人步伐間隔期間,假設(shè)速度和航向是常量。考慮到折線法,方程式1可改寫成:
方程式2
方程式2表述航位推算(DR)算法,該方法是基于步數(shù)計(jì)算,而不是加速度和角速率的積分運(yùn)算。方程式2的航位推算過程有三個(gè)要素:1)在t-1 (Et-1, Nt-1)時(shí)最后一次已知的用戶絕對(duì)位置(用東北坐標(biāo)系表示);2)從t-1到t(3.png)的步長;3)從時(shí)間t-1開始的航向 (ψ) 可以算出新位置相對(duì)已知位置(Et-1, Nt-1)的坐標(biāo)(Et, Nt),如方程式2所示。我們仔細(xì)觀察方程式2不難發(fā)現(xiàn),行人航位推算精度取決于兩個(gè)要素:1)行走距離的計(jì)算,2)用戶航向(或方向)在行人航位推算原理中,行走距離的計(jì)算方法是檢測(cè)估算行人每行走一步的步長,然后累計(jì)步長估算值。精確地估算全球用戶的步長是一項(xiàng)具有挑戰(zhàn)性的任務(wù)。目前業(yè)內(nèi)開發(fā)出了多個(gè)步長精確估算模型,見參考文獻(xiàn)[3][4]。圖1所示是含有各種組件的行人航位推算系統(tǒng)框圖。慣性傳感器數(shù)據(jù)通過校準(zhǔn)監(jiān)視邏輯處理,以保持對(duì)加速度計(jì)和陀螺儀測(cè)量偏差和標(biāo)度系數(shù)的精確估算。磁強(qiáng)計(jì)數(shù)據(jù)通過校準(zhǔn)監(jiān)視模塊處理,以決定是硬鐵參數(shù)還是軟鐵參數(shù)。磁力計(jì)數(shù)據(jù)監(jiān)視的另一個(gè)目的是確定測(cè)量數(shù)據(jù)有無磁性干擾數(shù)據(jù),防止磁干擾影響校準(zhǔn)參數(shù)。
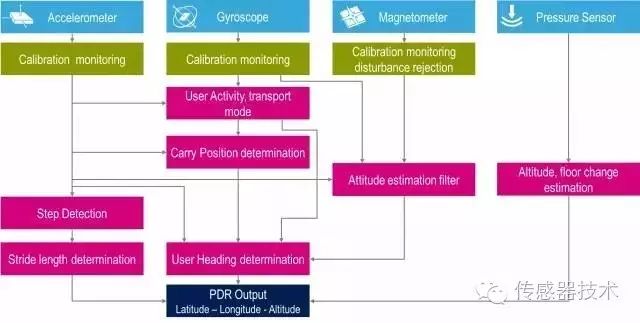
圖 1 行人航位推算框圖
步伐檢測(cè)算法利用模式匹配法與人類步態(tài)模型特征匹配。加速度模式隨著設(shè)備攜帶位置(褲子口袋、腰帶包、襯衫口袋)不同而變化。載物位置確定模塊用于確定設(shè)備常用存放位置,例如,手里拿著擺臂走路;舉在頭部附近,放在褲子口袋、襯衫口袋、腰帶包、雙肩背包里。用戶航向是行人航位推算方程式的第二個(gè)術(shù)語,包括設(shè)備航向和用戶行走方向。計(jì)算設(shè)備航向需要使用經(jīng)過傾斜修正的羅盤測(cè)量值。不過,因?yàn)橥獠看艛_會(huì)影響羅盤的性能,完全依賴羅盤的測(cè)量值不現(xiàn)實(shí),這是我們采用一個(gè)數(shù)據(jù)整合濾波器又稱姿態(tài)濾波器,整合磁力計(jì)、陀螺儀和加速度計(jì)數(shù)據(jù)的主要原因。姿態(tài)濾波器可以計(jì)算設(shè)備在人體坐標(biāo)系相對(duì)大地參考坐標(biāo)系的方向。因?yàn)檫@個(gè)數(shù)學(xué)表達(dá)式比較緊湊,所以設(shè)備方向用四元數(shù)表示,與Euler角度或 9 X 9 方向矩陣相比,四元數(shù)更具有數(shù)字穩(wěn)定性。姿態(tài)濾波器基于擴(kuò)展卡爾曼濾波器(EKF)概念,以解決外部磁場強(qiáng)度不斷變化和用戶在常用情況下導(dǎo)致的設(shè)備動(dòng)態(tài)運(yùn)動(dòng)對(duì)航向的影響。因?yàn)楹较驅(qū)傮w定位精度的影響巨大,所以必須認(rèn)真考慮傳感器隨機(jī)噪聲、偏差、偏差不穩(wěn)定性、非線性以及其它的可能降低系統(tǒng)性能的因素。低噪聲磁力計(jì)的重要性在3-D空間正常旋轉(zhuǎn)設(shè)備時(shí),傳感器各軸受地磁場強(qiáng)矢量影響,我們使用此時(shí)采集到的測(cè)量數(shù)據(jù)計(jì)算磁強(qiáng)計(jì)校準(zhǔn)參數(shù)(硬鐵和軟鐵)。偏移估算精度與磁強(qiáng)計(jì)數(shù)據(jù)中的噪聲信號(hào)直接關(guān)聯(lián)。如果磁力計(jì)的噪聲非常高,偏移估算精度將會(huì)變差,最終將會(huì)影響航向估算結(jié)果。偏移估算誤差對(duì)高緯度地區(qū)定準(zhǔn)更加重要,因?yàn)楦呔暥鹊貐^(qū)磁場水平場強(qiáng)較弱。即便在水平場強(qiáng)中等地區(qū),1 ?T偏移誤差可以引起5度的航向誤差,這對(duì)于行人航位推算應(yīng)用是一個(gè)不小的誤差。行走角度確定姿態(tài)濾波器用于計(jì)算設(shè)備在身體坐標(biāo)系內(nèi)的航向。不過,設(shè)備可能隨意置于用戶身體某一位置,姿態(tài)濾波器航向與用戶航向或行走方向并不一致,如圖2所示。
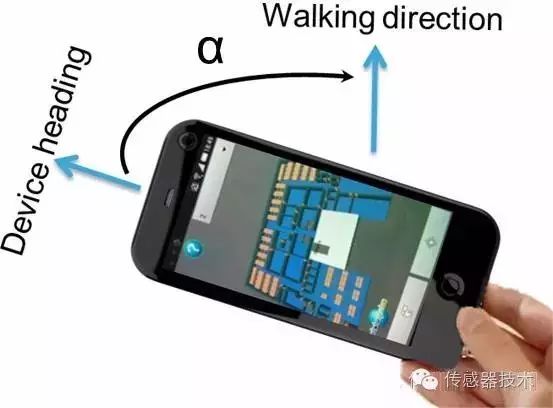
圖2行走方向
行走角度α的計(jì)算運(yùn)用了行人運(yùn)動(dòng)的身體特征以及加速度波形的周期特征和統(tǒng)計(jì)學(xué)。測(cè)試結(jié)果我們采用加速度計(jì)和陀螺儀模塊(LSM6DSM)、磁強(qiáng)計(jì)(LSM303AGR)和壓力傳感器(LPS22HB)和STM32微控制器開發(fā)出一個(gè)行人航位推算解決方案,這個(gè)由傳感器、微控制器和藍(lán)牙組成的硬件參考設(shè)計(jì)叫做SensorTile? (詳情訪問www.ST.com),可以利用一個(gè)安卓應(yīng)用在手機(jī)上實(shí)時(shí)顯示行人航位推算軌跡輸出。六軸傳感器LSM6DSM(加速度計(jì) + 陀螺儀)正常工作模式下功耗小于400 ?A。在這個(gè)傳感器模塊內(nèi),陀螺儀的角速率噪聲密度為3.8 mdps /√Hz。加速度計(jì)噪聲密度為90 ?g /√Hz。磁力計(jì)的RMS噪聲為3 mGauss,采用AMR技術(shù),無溫度漂移問題,在高分辨率模式下,工作電流小于200 ?A。壓力傳感器RMS噪聲為0.0075 hPA,溫度漂移0.1 hPa。上文描述的傳感器的噪聲特性和偏移穩(wěn)定性,配合穩(wěn)健可靠的高性能行人航位推算算法,可以實(shí)現(xiàn)隨時(shí)隨地定位的目標(biāo)。下圖3所示是某些常用場景行走測(cè)試軌跡。
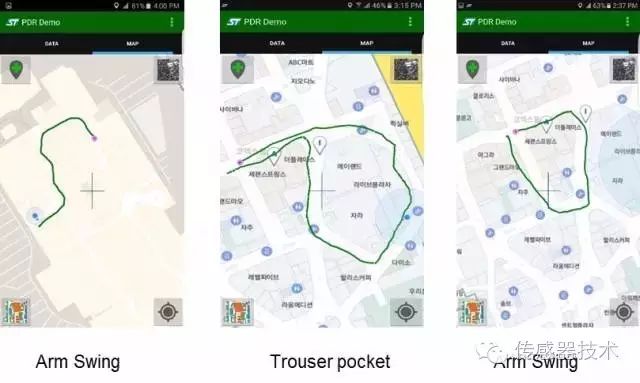
圖3 行人航位推算在常用場合行走測(cè)試結(jié)果
-
傳感器
+關(guān)注
關(guān)注
2553文章
51390瀏覽量
756566 -
mems
+關(guān)注
關(guān)注
129文章
3958瀏覽量
191093 -
陀螺儀
+關(guān)注
關(guān)注
44文章
792瀏覽量
98972 -
加速度計(jì)
+關(guān)注
關(guān)注
6文章
704瀏覽量
46022 -
磁力計(jì)
+關(guān)注
關(guān)注
1文章
71瀏覽量
20945
原文標(biāo)題:基于MEMS傳感器的行人航位推算(PDR)解決方案
文章出處:【微信號(hào):WW_CGQJS,微信公眾號(hào):傳感器技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
盤點(diǎn)5種應(yīng)用最廣MEMS傳感器
MEMS和傳統(tǒng)傳感器的區(qū)別
如何選擇合適的MEMS傳感器
MEMS傳感器應(yīng)用領(lǐng)域 MEMS技術(shù)在智能手機(jī)中的應(yīng)用
mems傳感器在汽車電子上的應(yīng)用有哪些
mems傳感器是什么意思_mems傳感器原理是什么
液位傳感器怎么安裝和使用呢
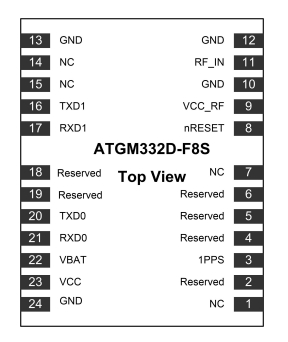
ATGM332D-F8S單北斗多頻車載航位推算模塊功能與應(yīng)用選型
60+圖片,10大MEMS傳感器原理全解析!網(wǎng)上很難找到!
深圳國際傳感器技術(shù)展:航智總經(jīng)理深入解讀磁通門電流傳感器技術(shù)及應(yīng)用

Qorvo推出引領(lǐng)下一代觸控板設(shè)計(jì)的MEMS壓力傳感器

汽車傳感器測(cè)試解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論